带搅拌釜式反应器CSTR系统控制方案
- 格式:pdf
- 大小:331.05 KB
- 文档页数:19
连续搅拌釜式反应器(CTRS)控制系统设计河南⼯业⼤学开放实验室实验项⽬设计报告连续搅拌釜式反应器(CTRS)控制系统设计学校:河南⼯业⼤学学院:机电⼯程学院专业:机械设计制造及其⾃动化姓名:冷会昌学号:20074050602⽬录1 前⾔ (2)2 ⼯艺过程简介 (2)2、1 过程变量说明 (3)2、2 操作变量说明 (3)3 反应过程特性 (3)4 实验内容 (5)5 反应过程开车及正常运⾏ (6)6 开车步骤顺序控制 (7)7 思考题 (8)8 ⼼得体会 (9)连续搅拌釜式反应器(CTRS)控制系统设计1、前⾔本连续反应过程是⼯业常见的典型的带搅拌的釜式反应器(CSTR)系统,同时⼜是⾼分⼦聚合反应。
本实验是当前全实物实验根本⽆法进⾏的复杂、⾼危险性实验,⼜是⾮常重要的基础反应动⼒学实验和反应系统控制实验内容。
此外,全实物实验还⾯临物料消耗、能量消耗、反应产物的处理、废⽓废液的处理和环境污染问题,以上各项问题⽐间歇反应更严重,因为连续反应的处理量⼤⼤超过间歇过程。
现有的连续反应实验系统实际上都是⽔位及流量系统,根本没有反应现象。
在本连续反应实验系统上除了进⾏常规控制系统实验外,还可以进⾏模糊控制、优化控制、深层知识专家系统(例如SDG法)故障诊断等⾼级控制实验。
2、⼯艺过程简介连续反应实验系统以液态丙烯为单体、以液态已烷为溶剂,在催化剂与活化剂的作⽤下,在反应温度70 1.0℃下进⾏悬浮聚合反应,得到聚丙烯产品。
在⼯业⽣产中为了提⾼产量,常⽤两釜或多釜串联流程。
由于在每⼀个反应釜中的动态过程内容相似,为了提⾼实验效率、节省实验时间,特将多釜反应器简化为单反应器连续操作系统。
丙烯聚合反应是在⼰烷溶剂中进⾏的,采⽤了⾼效、⾼定向性催化剂。
⼰烷溶剂是反应⽣成物聚丙烯的载体,不参与反应,反应⽣成的聚丙烯不溶于单体丙烯和溶剂,反应器内的物料为淤浆状,故称此反应为溶剂淤浆法聚合。
见图1-1所⽰,连续反应实验系统包括:带搅拌器的釜式反应器。
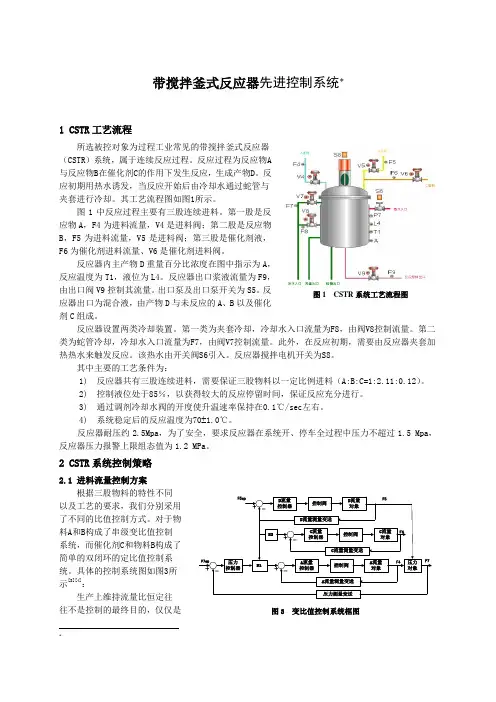
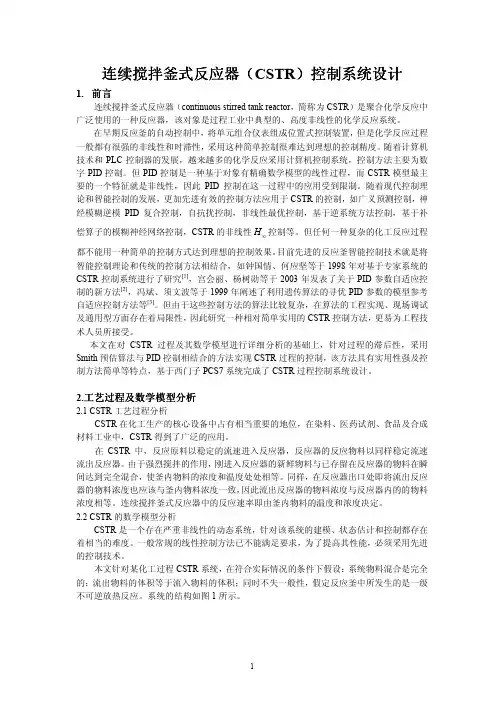
带搅拌釜式反应器先进控制系统*1 CSTR 工艺流程所选被控对象为过程工业常见的带搅拌釜式反应器(CSTR )系统,属于连续反应过程。
反应过程为反应物A 与反应物B 在催化剂C 的作用下发生反应,生成产物D 。
反应初期用热水诱发,当反应开始后由冷却水通过蛇管与夹套进行冷却。
其工艺流程图如图1所示。
图1中反应过程主要有三股连续进料。
第一股是反应物A ,F4为进料流量,V4是进料阀;第二股是反应物B ,F5为进料流量,V5是进料阀;第三股是催化剂液,F6为催化剂进料流量、V6是催化剂进料阀。
反应器内主产物D 重量百分比浓度在图中指示为A ,反应温度为T1,液位为L4。
反应器出口浆液流量为F9,由出口阀V9控制其流量。
出口泵及出口泵开关为S5。
反应器出口为混合液,由产物D 与未反应的A 、B 以及催化剂C 组成。
反应器设置两类冷却装置。
第一类为夹套冷却,冷却水入口流量为F8,由阀V8控制流量。
第二类为蛇管冷却,冷却水入口流量为F7,由阀V7控制流量。
此外,在反应初期,需要由反应器夹套加热热水来触发反应。
该热水由开关阀S6引入。
反应器搅拌电机开关为S8。
其中主要的工艺条件为:1) 反应器共有三股连续进料,需要保证三股物料以一定比例进料(A:B:C=1:2.11:0.12)。
2) 控制液位处于85%,以获得较大的反应停留时间,保证反应充分进行。
3) 通过调剂冷却水阀的开度使升温速率保持在0.1℃/sec左右。
4) 系统稳定后的反应温度为70±1.0℃。
反应器耐压约2.5Mpa ,为了安全,要求反应器在系统开、停车全过程中压力不超过1.5 Mpa ,反应器压力报警上限组态值为1.2 MPa 。
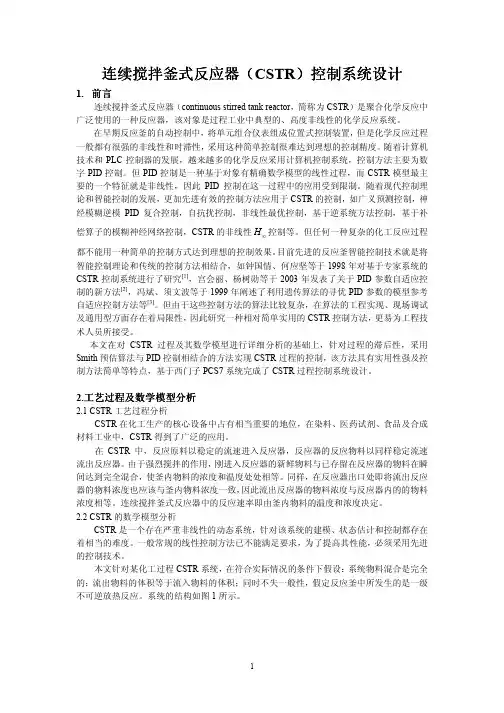
2 CSTR 系统控制策略2.1 进料流量控制方案根据三股物料的特性不同以及工艺的要求,我们分别采用了不同的比值控制方式。
对于物料A 和B 构成了串级变比值控制系统,而催化剂C 和物料B 构成了简单的双闭环的定比值控制系统。
连续连续搅拌釜式反应器搅拌釜式反应器搅拌釜式反应器((CSTR )控制系统设计1. 前言连续搅拌釜式反应器(continuous stirred tank reactor ,简称为CSTR )是聚合化学反应中广泛使用的一种反应器,该对象是过程工业中典型的、高度非线性的化学反应系统。
在早期反应釜的自动控制中,将单元组合仪表组成位置式控制装置,但是化学反应过程一般都有很强的非线性和时滞性,采用这种简单控制很难达到理想的控制精度。
随着计算机技术和PLC 控制器的发展,越来越多的化学反应采用计算机控制系统,控制方法主要为数字PID 控制。
但PID 控制是一种基于对象有精确数学模型的线性过程,而CSTR 模型最主要的一个特征就是非线性,因此PID 控制在这一过程中的应用受到限制。
随着现代控制理论和智能控制的发展,更加先进有效的控制方法应用于CSTR 的控制,如广义预测控制,神经模糊逆模PID 复合控制,自抗扰控制,非线性最优控制,基于逆系统方法控制,基于补偿算子的模糊神经网络控制,CSTR 的非线性H ∞控制等。
但任何一种复杂的化工反应过程都不能用一种简单的控制方式达到理想的控制效果。
目前先进的反应釜智能控制技术就是将智能控制理论和传统的控制方法相结合,如钟国情、何应坚等于1998年对基于专家系统的CSTR 控制系统进行了研究[1],宫会丽、杨树勋等于2003年发表了关于PID 参数自适应控制的新方法[2],冯斌、须文波等于1999年阐述了利用遗传算法的寻优PID 参数的模型参考自适应控制方法等[3]。
但由于这些控制方法的算法比较复杂,在算法的工程实现、现场调试及通用型方面存在着局限性,因此研究一种相对简单实用的CSTR 控制方法,更易为工程技术人员所接受。
本文在对CSTR 过程及其数学模型进行详细分析的基础上,针对过程的滞后性,采用Smith 预估算法与PID 控制相结合的方法实现CSTR 过程的控制,该方法具有实用性强及控制方法简单等特点,基于西门子PCS7系统完成了CSTR 过程控制系统设计。
DMC算法在CSTR温度控制中的应用何美霞;周箩鱼【摘要】连续搅拌反应釜(CSTR)的温度具有强非线性的动态特性,传统的控制方法效果往往不尽人意,而动态矩阵控制 (DMC)算法在处理非线性问题时有一定的优势.以非线性 CSTR 系统的反应釜温度为控制目标,通过仿真试验研究了DMC算法在该系统分别处于理想状态、存在输出干扰及模型失配3种情况时的目标控制效果.仿真结果表明,DMC算法能有效地控制反应釜温度;理想状态下的控制效果表现出上升速度快、调节时间短、无稳态误差等优点;存在输出干扰和系统模型失配时仍有良好的控制效果,具有较强的抗干扰能力和鲁棒性.【期刊名称】《长江大学学报(自然版)理工卷》【年(卷),期】2018(015)005【总页数】5页(P41-45)【关键词】连续搅拌反应釜;温度控制;动态矩阵控制;干扰;模型失配;鲁棒性【作者】何美霞;周箩鱼【作者单位】长江大学电子信息学院,湖北荆州434023;长江大学电子信息学院,湖北荆州434023【正文语种】中文【中图分类】TP273连续搅拌反应釜(Continuous Stirring Tank Reactor,CSTR)是工业过程中广泛使用的一类反应器[1]。
反应器温度及反应物浓度等对产品质量及生产安全有重大影响,因此对这些指标的控制是工业过程控制领域的研究热点。
然而,由于CSTR具有强非线性的动态特性,传统的控制方法(如PID控制、比值控制)效果不尽人意,因此许多学者开始寻求更优的控制方法。
李述清等[2]针对CSTR系统控制问题,设计了一种基于闭环增益成型算法的PID控制器,提高了PID控制器设计的简洁性和鲁棒性。
刘士荣和俞金寿[3]采用神经模糊逆模控制与PID反馈控制相结合的复合控制策略,应用于CSTR的反应物浓度控制中。
通过仿真证明了这类控制策略的有效性和实用性。
刘松等[4]针对CSTR模型设计了具有高增益观测器的非线性鲁棒控制器(ONRC),提出一种简单的控制器的参数整定方法。
连续连续搅拌釜式反应器搅拌釜式反应器搅拌釜式反应器((CSTR )控制系统设计1. 前言连续搅拌釜式反应器(continuous stirred tank reactor ,简称为CSTR )是聚合化学反应中广泛使用的一种反应器,该对象是过程工业中典型的、高度非线性的化学反应系统。
在早期反应釜的自动控制中,将单元组合仪表组成位置式控制装置,但是化学反应过程一般都有很强的非线性和时滞性,采用这种简单控制很难达到理想的控制精度。
随着计算机技术和PLC 控制器的发展,越来越多的化学反应采用计算机控制系统,控制方法主要为数字PID 控制。
但PID 控制是一种基于对象有精确数学模型的线性过程,而CSTR 模型最主要的一个特征就是非线性,因此PID 控制在这一过程中的应用受到限制。
随着现代控制理论和智能控制的发展,更加先进有效的控制方法应用于CSTR 的控制,如广义预测控制,神经模糊逆模PID 复合控制,自抗扰控制,非线性最优控制,基于逆系统方法控制,基于补偿算子的模糊神经网络控制,CSTR 的非线性H ∞控制等。
但任何一种复杂的化工反应过程都不能用一种简单的控制方式达到理想的控制效果。
目前先进的反应釜智能控制技术就是将智能控制理论和传统的控制方法相结合,如钟国情、何应坚等于1998年对基于专家系统的CSTR 控制系统进行了研究[1],宫会丽、杨树勋等于2003年发表了关于PID 参数自适应控制的新方法[2],冯斌、须文波等于1999年阐述了利用遗传算法的寻优PID 参数的模型参考自适应控制方法等[3]。
但由于这些控制方法的算法比较复杂,在算法的工程实现、现场调试及通用型方面存在着局限性,因此研究一种相对简单实用的CSTR 控制方法,更易为工程技术人员所接受。
本文在对CSTR 过程及其数学模型进行详细分析的基础上,针对过程的滞后性,采用Smith 预估算法与PID 控制相结合的方法实现CSTR 过程的控制,该方法具有实用性强及控制方法简单等特点,基于西门子PCS7系统完成了CSTR 过程控制系统设计。

带搅拌釜式反应器CSTR系统控制方案带搅拌釜式反应器(Continuous Stirred Tank Reactor,简称CSTR)是一种常见的化学反应器,其具有连续投料、连续排出产物和持续搅拌混合等特点,广泛应用于化学工业中的各种反应过程。
CSTR系统的控制方案主要包括反应温度控制、反应物进料控制和产物排放控制等。
本文将从这三个方面对CSTR系统的控制方案进行详细阐述。
1.反应温度控制:反应温度是CSTR系统中一个重要的控制参数,过高或过低的反应温度都会对反应过程产生负面影响。
因此,反应温度的控制对于保证反应过程的高效进行至关重要。
一种常见的反应温度控制方案是PID控制器控制。
PID控制器通过调节加热或冷却系统来维持反应器的温度在设定值附近。
具体控制过程如下:(1)从反应器中测量反应温度;(2)将测量值与设定值进行比较,得到误差;(3)根据误差计算出控制增益,控制增益由PID控制器自动调整;(4)控制增益根据设定算法调节加热或冷却系统,使反应器的温度趋向于设定值。
2.反应物进料控制:反应物进料对于反应过程的速率和效率具有重要影响。
控制反应物的进料量可以保证反应过程以合适的速率进行。
一种常见的反应物进料控制方案是基于反馈控制的PID控制器。
具体控制过程如下:(1)从反应器中测量反应物的浓度;(2)将测量值与设定值进行比较,得到误差;(3)根据误差计算出控制增益,控制增益由PID控制器自动调整;(4)控制增益根据设定算法调节反应物进料系统,使反应物的浓度趋向于设定值。
3.产物排放控制:产物排放是CSTR系统中的另一个重要环节。
合理控制产物的排放可以保证反应过程的稳定性和安全性。
一种常见的产物排放控制方案是基于反馈控制的PID控制器。
(1)从反应器中测量产物的浓度;(2)将测量值与设定值进行比较,得到误差;(3)根据误差计算出控制增益,控制增益由PID控制器自动调整;(4)控制增益根据设定算法调节产物排放系统,使产物的浓度趋向于设定值。
吉林化工学院毕业设计说明书连续搅拌反应釜系统的控制器设计与仿真Controller Design and Simulation for CSTR学生学号:11510210学生姓名:严新宇专业班级:自动1102指导教师:王野职称:工程师起止日期:2015.03.09~2015.06.26吉林化工学院Jilin Institute of Chemical Technology摘要连续搅拌反应釜(CSTR)是发酵、化工、石油生产、生物制药等工业生产过程中应用最广泛的一种化学反应器,其控制质量直接影响到生产的效益和质量指标。
对连续搅拌反应釜通过控制内部的工艺参数,如温度、压力、浓度等稳定,保证反应的正常运行。
本文针对连续搅拌反应釜的数学模型,应用泰勒展开得到了线性状态空间表达式,在此基础上设计了LQR控制器,仿真结果表明,控制效果令人满意。
本设计将CSTR的非线性动态模型进行了输入输出线性化,得到CSTR线性状态空间模型。
设计出连续搅拌反应釜的极点配置控制器并对系统进行仿真。
设计出连续搅拌反应釜的LQR控制器并对其系统进行仿真。
并对两种控制方法的控制效果进行了比较。
关键词:连续反应搅拌釜;LQR控制器;MATLAB仿真AbstractContinuous stirred tank reactor (CSTR) is the most widely used in fermentation, chemical engineering, petroleum production, bio pharmaceutical and other industrial production process as a chemical reactor, control the quality directly affect the production efficiency and quality index. For continuous stirred tank reactor by controlling the process parameters, such as temperature, pressure, concentration and so on, ensure the normal operation of the reaction. In this paper, based on a continuous stirred reactor mathematical model, the application of Taylor expansion is obtained for the linear state space representation, on this basis, design the LQR controller. Simulation results show that the control effect is satisfactory.In this paper, the nonlinear dynamic model of CSTR is linearized, and the CSTR linear state space model is obtained. The pole assignment controller for continuous stirred tank reactor was designed and the simulation of the system was carried out. The LQR controller of the continuous stirred tank reactor is designed and the system is simulated. The control effect of the two control methods is compared.Key Words: Continuous Stirred Tank; LQR Controller; MATLAB Simulation目录摘要 (I)Abstract ......................................................................................................................................................... I I 第1章绪论 (2)1.1 课题背景及目的意义 (2)1.2 国内研究现状 (2)1.3 国外研究现状 (3)1.4 连续反应搅拌釜的控制技术 (4)1.5 仿真技术 (4)1.5.1 数字仿真概述 (4)1.5.2 MATLAB仿真软件 (8)1.6本设计的主要研究内容 (10)第2章连续搅拌反应釜的数学模型 (12)2.1 连续搅拌反应釜结构 (12)2.2 连续搅拌反应釜仿真模型的建立 (14)2.3 非线性模型的线性化 (17)第3章极点配置控制器的设计与仿真 (19)3.1 极点配置 (19)3.2 极点配置控制器的设计 (19)3.2.1 极点配置控制算法 (19)3.2.2 CSTR极点配置控制器设计 (20)第4章LQR控制器的设计与仿真 (25)4.1 LQR控制器的介绍 (25)4.2 LQR控制器的原理 (25)4.3 LQR控制器的设计 (26)4.4 两种控制器效果对比 (29)结论 (31)参考文献 (32)附录Ⅰ线性化程序 (33)致谢 (35)第1章绪论1.1 课题背景及目的意义连续搅拌反应釜是化工生产中的常用设备,同时又是典型的非线性被控对象。