w H - w H=0
假想定轴轮系
指给整个周转轮系加上一个“-wH”的公共角速度,使系杆H变为相对固定后,所得到的假想的定轴轮系。
原轮系
转化轮系
转化轮系
2. 转化轮系中各构件的角速度
3. 转化轮系的传动比
可按定轴轮系传动比的方法求得:
传动比计算的一般公式:
1. 上式只适用于转化轮系首末两轮轴线平行的情况。 2. 齿数比之前要加“+”或“–”号来表示齿轮之间的转向关系(提前可以根据定轴轮系的方法用箭头判断出)。 3. 将ω1、ωn、ωH 的数值代入上式时,必须同时带“±”号。
z1=z3 , nH=n4
六、实现运动的分解
汽车后桥的差动器能根据汽车不同的行驶状态,自动将主轴的转速分解为两后轮的不同转动。
各齿廓啮合处的径向分力和行星轮公转所产生的离心惯性力得以平衡,可大大改善受力状况;
七、实现结构紧凑的大功率传动
多个行星轮共同分担载荷,可以减少齿轮尺寸;
中心轮(太阳轮1,3):轴线固定并与主轴线重合的齿轮。
行星轮(2):轮系中轴线不固定齿轮(自转与公转)。
机架:固定件
系杆
行星轮
太阳轮
1 ,3 ——中心轮(太阳轮) 2 —— 行星轮 H —— 系杆(转臂)
基本构件
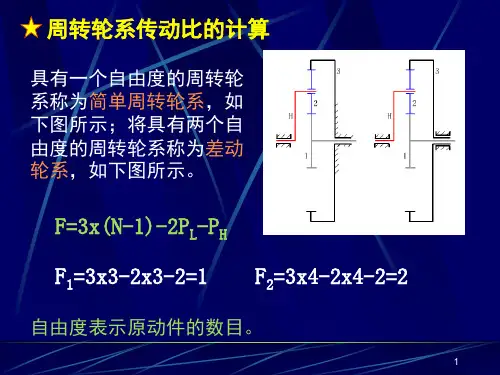
2. 周转轮系的分类
a)按其自由度数分:
自由度为1
差动轮系
自由度为2
行星轮系
3K型
b)根据基本构件的组成分
有3个中心轮。 1,3,4轮
2K型
有2个中心轮, 1,3轮
既包含定轴轮系部分,又包含周转轮系部分的轮系,或是由几个周转轮系组成的轮系。
三. 复合轮系
定轴轮系
周转轮系