周转轮系的传动比计算
- 格式:ppt
- 大小:1.30 MB
- 文档页数:12
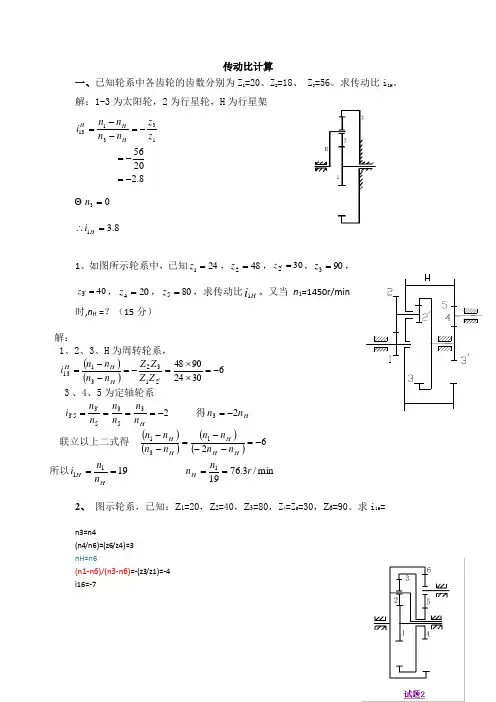
传动比计算一、已知轮系中各齿轮的齿数分别为Z 1=20、Z 2=18、 Z 3=56。
求传动比i 1H 。
解:1-3为太阳轮,2为行星轮,H 为行星架8.22056133113-=-=-=--=z z n n n n i H HH03=n 8.31=∴H i1、如图所示轮系中,已知241=z ,482=z ,302='z ,903=z ,403='z ,204=z ,805=z ,求传动比i H 1。
又当 n 1=1450r/min时,n H =?(15分)2、 图示轮系,已知:Z 1=20,Z 2=40,Z 3=80,Z 4=Z 5=30,Z 6=90。
求i 16=n3=n4(n4/n6)=(z6/z4)=3 nH=n6(n1-n6)/(n3-n6)=-(z3/z1)=-4i16=-7解:1、2、3、H 为周转轮系,()()63024904821323113-=⨯⨯=-=--='Z Z Z Z n n n n i H H H3/、4、5为定轴轮系23535353-====''H n nn n n n i 得H n n 23-=联立以上二式得 ()()()()62131-=---=--H H H H H n n n n n n n n所以1911==HH n n i min /3.76191r n n H ==2、Z 1=15,Z 2=25,Z 3=20,Z 4=60。
n 1 =200r/min (顺时针)n 4=50r/min (顺时针)试求H 的转速。
解:1、4为太阳轮,2、3为行星轮,H 为行星架52015602531424114-=⨯⨯-=-=--=z z zz n n n n i H H Hmin/75550200r n n n H H H=-=-- H 的转速为75r/min ,顺时针方向。
步骤:1. 先看准图,看清图!2. 拆分!3. 按照拆分的结果进行组合!4. 1、 图示为滚齿机滚刀与工件间的传动简图,以知各轮的齿数为:Z 1=35,z 2=10,Z 3=30,z 4=70,Z 5=40,Z 6=90,Z 7=1,Z 8=84.求毛坯回转一转时滚刀轴的转数。
周转轮系的传动比计算周转轮系是一种用于传输运动和力的机械装置,常用于车辆和工程机械等设备中。
传动比是周转轮系中的重要参数,用于描述输入轮与输出轮的转速比和力的大小,决定了输出轮的转速和扭矩。
计算周转轮系的传动比需要确定输入轮和输出轮的直径。
假设输入轮的直径为D1,输出轮的直径为D2,其对应的转速分别为N1和N2、则周转轮系的传动比可以由下面的公式计算得到:传动比=N2/N1=D1/D2其中,传动比表示输出轮相对于输入轮的转速增益。
如果传动比大于1,输出轮的转速将大于输入轮的转速;如果传动比小于1,输出轮的转速将小于输入轮的转速;如果传动比等于1,输出轮的转速与输入轮的转速相等。
在实际应用中,周转轮系的传动比可以通过以下几种方式计算和确定。
1.机械传动计算法:根据输入轮和输出轮的直径来计算传动比。
这种方法适用于已知直径和转速的情况,但需要知道输入轮和输出轮的几何参数。
2.编码器计算法:通过安装编码器在输入轮和输出轮上,实时测量转速,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装编码器和进行实时测量。
3.转速传感器计算法:通过安装转速传感器在输入轮和输出轮上,测量转速并传输给计算设备,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装转速传感器和进行实时测量。
4.模拟计算法:根据输入轮和输出轮的转速曲线来进行传动比的估算。
这种方法能够通过分析转速曲线得到传动比的趋势,但需要输入轮和输出轮的转速曲线数据。
总之,传动比是周转轮系中的重要参数,能够描述输入轮和输出轮之间的转速和扭矩关系。
计算传动比需要确定输入轮和输出轮的直径,并可以通过机械传动计算法、编码器计算法、转速传感器计算法或模拟计算法来进行。
通过计算传动比可以优化周转轮系的设计和使用,满足具体设备的要求。


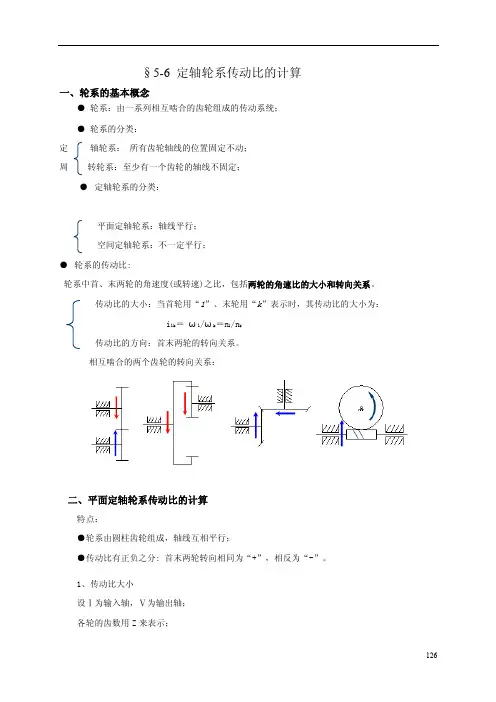
126§5-6 定轴轮系传动比的计算一、轮系的基本概念● 轮系:由一系列相互啮合的齿轮组成的传动系统; ● 轮系的分类: 定轴轮系: 所有齿轮轴线的位置固定不动; 周转轮系:至少有一个齿轮的轴线不固定; ● 定轴轮系的分类:平面定轴轮系:轴线平行; 空间定轴轮系:不一定平行;● 轮系的传动比:轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。
传动比的大小:当首轮用“1”、末轮用“k ”表示时,其传动比的大小为: i 1k = ω1/ωk =n 1/n k 传动比的方向:首末两轮的转向关系。
相互啮合的两个齿轮的转向关系:二、平面定轴轮系传动比的计算特点:●轮系由圆柱齿轮组成,轴线互相平行;●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。
1、传动比大小设Ⅰ为输入轴,Ⅴ为输出轴; 各轮的齿数用Z 来表示;127角速度用ω表示;首先计算各对齿轮的传动比:所以:结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。
(1)公式法式中:m 为外啮合圆柱齿轮的对数 举例:(2)箭头标注法采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。
举例:122112z z i ==ωω32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i ==ωω11211)1(--==k k m k k z z z z i ωω128三、空间定轴轮系的传动比特点:●轮系中包含有空间齿轮(如锥齿轮、蜗轮蜗杆、螺旋齿轮等); ●首末两轮的轴线不一定平行。
1 传动比的大小2 传动比的方向注意:只能采用箭头标注法,不能采用(-1)m 法判断。

周转轮系传动比计算周转轮系传动比是指传动装置中主动齿轮和从动齿轮之间的齿数比值,通常表示为n₁/n₂,其中n₁为主动齿轮的齿数,n₂为从动齿轮的齿数。
通过计算周转轮系传动比,我们可以确定驱动装置的转速与被驱动装置的转速之间的关系,从而对机械系统的工作性能进行分析和设计。
计算周转轮系传动比的方法有两种:基本齿轮传动和行星齿轮传动。
一、基本齿轮传动的传动比计算方法:1. 单级齿轮传动:对于单级齿轮传动而言,传动比即为主动齿轮与从动齿轮的齿数比,即n₁/n₂。
2. 多级齿轮传动:对于多级齿轮传动而言,将每一级的传动比进行连乘即可得到整个传动系统的传动比。
二、行星齿轮传动的传动比计算方法:行星齿轮传动中的传动比可以通过以下公式进行计算:n₁/n₂ = (n₃ + n₄) / n₅其中,n₃为行星齿轮轴上的齿数,n₄为太阳齿轮轴上的齿数,n₅为内圈齿轮轴上的齿数。
行星齿轮传动的传动比与太阳齿轮的齿数和行星齿轮的齿数有关。
在实际计算传动比时,还需考虑到齿轮的模数、齿宽、啮合系数等参数。
齿轮模数越大,齿轮的齿数也相应增加,传动比就会越大;齿宽的增加会使传动可靠性增强,但与此同时传动比也会有所增加;而啮合系数是对齿轮传动效率的一个修正因素,一般取0.98左右。
在设计和选择齿轮传动时,通常使用标准的齿轮模数和齿数,通过合适的组合可以得到所需的传动比。
此外,还需要考虑齿轮传动的齿轮啮合方式(直齿轮、斜齿轮、渐开线齿轮等)、齿轮的材料和硬度等因素。
总之,周转轮系传动比的计算方法有基本齿轮传动和行星齿轮传动两种,通过合适的齿数和齿轮参数的选择,可以得到所需的传动比。
在实际应用中,还需根据具体情况进行齿轮的设计和选型,以保证传动系统的工作性能和可靠性。
周转轮系传动比计算
周转轮系(传动轮系)是指由两个或多个齿轮组成的传动装置,用于实现转矩和转速的变换。
在机械传动中,计算周转轮系的传动比是非常重要的,下面是关于周转轮系传动比的计算方法及相关参考内容。
1. 传动比的定义:
传动比是指输入轴(或驱动轴)的转速与输出轴(或从动轴)的转速之间的比值。
根据不同的周转轮系类型和传动方式,传动比可以通过不同的计算公式来计算。
2. 计算方法:
(1)直线齿轮传动:对于直线齿轮传动,传动比等于从动轮
的齿数除以驱动轮的齿数。
传动比 = 从动轮的齿数 / 驱动轮的齿数
(2)斜齿轮传动:对于斜齿轮传动,传动比等于从动轮的齿
数除以驱动轮的齿数乘以斜齿轮的传动比。
传动比 = (从动轮的齿数 / 驱动轮的齿数) * 斜齿轮的传动比
(3)带传动:对于带传动,传动比等于从动轮的转速除以驱
动轮的转速。
传动比 = 从动轮的转速 / 驱动轮的转速
3. 相关参考内容:
(1)《机械设计手册(第3版)》中关于周转轮系传动比的计算方法和相关公式。
(2)《机械设计基础(第3版)》中关于直线齿轮传动、斜齿轮传动和带传动的传动比计算方法和实例。
(3)《机械工程设计手册(第4版)》中关于周转轮系传动比的计算和设计原则。
(4)《机械设计手册(第4版)》中关于各种传动方式的传动比计算方法和设计指导。
(5)机械学术论文和研究报告中关于传动比计算方法和应用的内容。
以上是关于周转轮系传动比计算方法及相关参考内容的简要介绍。
通过合理计算和选择传动比,可以确保传动装置的性能和效率,满足各种工程需求。