水果无损采摘机械手工作空间分析及参数确定
- 格式:pdf
- 大小:1.62 MB
- 文档页数:6

水果采摘机器人的设计与研究近年来,随着人们生活水平的提高和对健康饮食的关注度越来越高,水果市场需求呈现不断扩大的趋势,而水果采摘工作一直是农业生产中最为繁重而费时的一项工作。
而恰恰在这个时候,水果采摘机器人应运而生,成为解决水果采摘难题的重要手段。
水果采摘机器人的设计研究主要目的就在于实现水果采摘的自动化,降低人力成本,增加生产效率,并提高采摘品质。
通常,水果采摘过程需要寻找果实、摘取、确认和归置等重要环节。
这正是水果采摘机器人设计需要关注的几个关键问题。
首先,对于果实的收集和寻找,机器人必须具备良好的检测机能,能够准确地识别果实的位置和成熟度,并相应地进行采摘工作。
常见的技术手段包括视觉检测、机器视觉、激光雷达、超声波、红外线等多种传感器技术,在水果采摘机器人的设计过程中可以依据实际需要进行合理组合。
其次,在进行果实采摘的过程中,自动化机器人必须能够准确地控制机械臂、夹持器件,完成传统采摘工人的操作。
针对不同类型的水果,需要通过合理的控制系统设计来确保夹持器的适配性,避免因机器误差导致成果量降低、损坏等风险,并保证采摘品质的稳定。
除此之外,水果采摘机器人在工作中还需要完成果实的分类、检查和归置等环节。
因此,与机械臂配合运作可以通过设计附加功能,实现这些可能变化的操作过程。
一个优秀的水果采摘机器人,必须具备稳定的识别能力,高效的采摘能力,以及符合人体工程学要求的机械结构、坚固的电机驱动等一系列必要的先进设计特色。
传统水果采摘方式通常需要耗费大量人力物力,机器人成为农业生产自动化发展的必然结果,其存在,将大大提高水果采摘的效率,降低农业生产管理成本,而且也极大的缓解了劳动力短缺的现状,真正做到了科技与农业的有机结合。
未来,水果采摘机器人还有很大的研究和发展空间。
通过人工智能的运用以及机器学习技术的应用,机器人在识别果实所处的成熟期、预测产量、选择采摘的最佳时间和地址方面将更加优秀。
农业机械自动化技术作为生产力升级的突破口,必将进一步推动中国现代化农业建设,推动国家经济的持续健康发展。

林业工程学报,2021,6(3):127-132Journal"Forestry EngineeringDOI:10N3360/j4mn.2096-1359202006004软体水果采摘机械手系统设计分析与试验华超,褚凯梅,陈昕,朱银龙"(南京林业大学机械电子工程学院,南京210037)摘要:为了解决传统刚性机械手在水果采摘方面交互性差和安全性低等问题,设计了一种软体采摘机械手及其控制系统&手由4个驱动手指和法兰盘组成,每个手指由硅胶材料注入3D打印的模具固化形成,具有结构简单、成本低、效率高以及交互性好等优点。
在正压和负压驱动下,可实现向内、外两个方向弯曲,抓取过程中能够自动适应抓取物体的形状大小。
利用ABAQUS有限元仿真对其弯曲特性进行仿真,分析各个结构参数对弯曲角度的影响,得出最优的结构参数,据此设计制造软体机械手样机。
机械手控制系统主要包括电路系统和气路系统,电路系统采用Stm32单片机与Labview上位机软件通讯,控制气路中电磁阀和比例阀的工作状态,并实时显示充气压力;气路系统中的比例阀用于调节气压大小,真空发生器用于提供负压实现向外侧弯曲,并通过电磁阀切换气路的工作模式(正压/负压)。
试验表明,研制的软体采摘机械手工作范围为0~60kPa,能够抓取的最大负载大约为5.3N,可实现对苹果、西红柿等水果的无损稳定抓取。
关键词:3D打印软体;软体采摘机械手;软体机器人;水果采摘中图分类号:TP241.3文献标志码:A开放科学(资源服务)标识码(OSIC):文章编号$2096-1359(2021)03-0127-06Design,analysis and experimental study of soft pickingmanipulator system for freib haa/estingHUA Chao,CHU Kaimei,CHEN Xin,ZHU Yinlong*(College of Electronic and MecCanical Engineering,Nanjing Forestry Universip,Nanjing210037,China)Manipulator is an important part of a robot to realize grab operation.With the continuous development of ro-bottchnoeogy,th5appeication fied ofindustaiaeautomation is5xtnd5d aapidey,and th5f5tching op5aation obuctand woaking5nviaonm5ntaa moaand moa div5asifid.Du5to itseaag5and compex stauctua5aigidity,th5taaditionaeaig-id manipueatoaisunabeto m55tth5soft,faagieitmsftching,and5asy to caus5damag5to gaab oad5ato solve the poor performance and low securite problems of the traditional rigid manipulator in the fruit picking interactiv-iy,asofpicking manipuea8oawasdesign,which iscomposed offouadaiveunisand feangesmadeofsieiconemaeai-ae,and moedspain ed using3Dpain ing echnoeogy.C8has8headvan agesofsimpeesauc8uae,eowcos8,high e f icien-cy,good in eaaciviy,ec.Daiven by posiivepae s uaeand negaivepae s uae,ican bebended8o8heinsideand ou-sidediaecionsand can au8omaica e y adap88o8heshapeand sieeofcaching obuecsin8hepaocessofgaasping.The ABAQUS software was used te simulate its bending characteristics,and the influence of various structural parameters on thebending chaaacteaisticswasana;yeed.Theoptima;stauctuaa;paaameteasweaeobtained,and thesoftwaaemanip-u atoapaototypewasdesigned and manufactuaed accoading;y.Themanipu atoacontao;system main;y inc;udesthecia-cuitsystem and thisstudy,theStm32micaocomputeawasused to communicatewith theLabview hostcomputeasoftwaaeto contao;thewoaking stateoftheso enoid va;ve,thepaopoationa;va;vein theaiaciacuit,and show the inf ation pae s uaein aea;time.Thepaopoationa;va;vein theaiapath system wasused to aduustthepae s uae,and thevacuum geneaatoawasused to paovidethenegativepaessuaeto aeaieethebending to theoutside.Thewoaking mode of the air path(positive pressure/negative pressure)was switched through the solenoid valve.Experiments illus-taated thatthe7oftpicking manipueatoapaopo7ed in thi7tudy can woak in theaangeof0-60kPa,which can gaa7p a load up to5.8N.The sofi harvesting manipulator can realize non-destructive and stable grasping of apples,tomatoes and other fruits,and has a broad potential application in fruit harvesting.3D printing of soft materials;soft picking manipulator;soft robot;enit harvesting收稿日期:2020-06-02修回日期:2020-06-30基金项目:江苏省高等学校自然科学研究项目(18KJA4600050);江苏省“六大人才高峰”高层次人才项目(GDZB-024)&作者简介:华超,男,研究方向为软体机器人&通信作者:朱银龙,男,副教授&E-mail:**************.en128林业工程学报第6卷水果采摘是农林生产过程中最重要的环节,目前水果主要依靠人工完成,效、成本、劳大等问题⑴,因此实现水果的自动化得越来越迫切[2]&目前,很多农林器人都实化,大大提效率[3],但大末端执行器都使用传统的械手,一、灵活性差、与题,极易抓取过程中损坏抓取产品,难以实现无损采摘(4-)&软械手的为水果提供的思和方法&Hav等】6]基 设计了一种软手爪,可以根据所抓取物体的形状自身的长度,达到抓取的效果。
水果自动采摘小型机械车的结构设计在现代社会发展极具迅速的时代,对水果的分类和采摘也成为了热议的话题,利用先进的技术,减少人力和物力,对多种水果进行分类及采摘。
我们提出了水果自动采摘小型机械车的初步设计。
了解水果自动采摘小型机械车的设计背景、结构及工作流程,对其结构进行运动分析,并进行设计。
水果自动采摘小型机械车不仅提高了采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益,因此,提高采摘作业机械化程度具有重要意义。
随着农业从业者的减少及老龄化趋势的不断加大,水果自动采摘小型机械车的开发利用具有巨大的經济效益和广阔的市场前景,水果自动采摘小型机械车对未来农业的发展将起到积极作用。
标签:水果自动采摘小型机械车;自动采摘识别;机械臂识别;初步设计Abstract:In the era of rapid development of modern society,the classification and picking of fruits has also become a hot topic. Using advanced technology,reducing manpower and material resources to classify and pick a variety of fruits,we put forward the preliminary design of the small mechanical vehicle for automatic fruit picking. To understand the design background,structure and work flow of the fruit automatic picking small mechanical vehicle,the structure of the movement analysis and design. Automatic fruit picking small mechanical vehicles not only improve the picking efficiency,but also reduce the damage rate,save labor costs,improve the economic benefits of fruit farmers,so it is of great significance to improve the degree of mechanization of picking operations. With the decrease of agricultural practitioners and the increasing trend of aging,the development and utilization of small mechanical vehicles for automatic fruit picking has great economic benefits and broad market prospects. Automatic fruit picking small mechanical vehicles will play a positive role in the future development of agriculture.Keywords:small automatic fruit-picking mechanical vehicle;automatic picking identification;mechanical arm identification;preliminary design1 概述水果种植业的迅速发展提升了果园机械的市场需求。

水果采摘机械手装置设计与仿真摘要近年来,随着全国经济的持续发展,人们对果蔬的需求越来越大。
在我国的果蔬生产中,柑橘生产所的占比重日益增大。
而在整个柑橘生产活动中,柑橘的采摘所占的工作量十分巨大。
除此之外,水果采摘质量的好坏还将直接影响到水果的保鲜储藏,运输配送等后续工作,并最终将严重影响到经济效益。
如果继续延续原始的手工采摘,不仅工作环境十分的艰苦,效率低下,而且水果采摘质量也得不到保障,更甚至时有采摘工作者在采摘过程中因为环境的复杂不小心从树上摔下而受伤的事故发生。
为了适应当代果蔬经济的发展,设计一种多自由度,满足工作空间的小型柑橘采摘机械手对实现农业自动化和提高经济效益具有重要意义。
根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;再按照设计的零件图通过Pro/E三维造型出机械手的所有零部件;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配;最后通过选用Pro/E 中的机构模式,经过旋转轴的自定义,伺服电机的添加,定义初始条件等完成机械手的运动仿真。
关键词:柑橘采摘机械手,内嵌式关节,Pro/E三维造型,运动仿真AbstractIn recent years, with the continuous development of economy, the proportion of citrus production in fruit and vegetable production is growing in our country. In the entire citrus production activities, the workload of citrus picking is very big. What’s more, the quality of fruit picking will directly affect the fruit storage, transportation and other follow-up work ,which eventually has serious influence on the economic benefit. If we continue to use the original manual picking, not only working environment is very difficult, working inefficient, but also the quality of fruit picking is not guaranteed .what’s worse, the fruit picking workers maybe fell from the trees and injured accidentally because the environment is very complex in the process of picking . In order to adapt to the development of contemporary economic fruit and vegetable, it is of great significance to agricultural automation realized and improving the economic benefit that designing a kind of small citrus picking manipulator with the features of multi-degree of freedom and satisfied the working space.According to the specific conditions of the whole process of fruit picking in citrus production activities, at first ,using the acquired knowledge to creatively design all parts of embedded citrus picking manipulator joints with reasonable size. Then according to the design of the part drawing shapes all parts of the manipulator through the Pro/E 3d modeling software. Next choosing the reasonable connection according to the workings of a manipulator and creating a reasonable constraint to complete the assembly of the manipulator. Finally ,through choosing mechanism model in Pro/E, after the axis of rotation of the custom, the adding of the servo motor and defined the initial conditions to complete the motion simulation of the manipulator.Keywords: citrus picking manipulator, embedded joints, Pro/E 3d modeling , motion simulation第一章绪论 (1)1.1前言 (1)1.2机械手的介绍 (1)1.3水果采摘机械手研究概况 (1)1.3.1 国外机械手的研究概况 (1)1.3.2 国内机械手研究概况 (3)1.4目的和意义 (3)第二章柑橘采摘机械手的结构设计 (5)2.1柑橘采摘机械手的系统构成 (5)2.2柑橘采摘机械手的材料选定 (5)2.3机械手大小臂长度的确定 (6)2.3.1 机械手大小臂长度的确定 (6)2.3.2 基于果园环境的机械手CAD模拟 (6)2.4机械手关节处伺服电机内嵌式创新 (8)2.5电机的选定 (8)2.5.1 电机种类的选择选择发 (8)2.5.2 电机规格的选择 (9)2.6机械臂尺寸的设计 (12)2.6.1 机械手的结构设计 (12)2.6.2 机械手各个零件的尺寸设计 (12)第三章三自由度机械手的三维造型 (14)3.1机械手大臂的三维造型。

水果采摘机械臂设计引言水果采摘是一项繁琐且费时的工作。
传统的人工采摘方式不仅劳动强度大,而且效率低下。
为了解决这个问题,设计和开发一台水果采摘机械臂成为了一种可行的选择。
本文将介绍水果采摘机械臂的设计原理、结构和工作过程。
设计原理水果采摘机械臂的设计基于计算机视觉和机器人学的原理。
首先,利用计算机视觉技术,对水果进行识别和定位。
然后,机械臂根据识别结果进行路径规划,以最短路径的方式前往目标水果的位置。
最后,机械臂通过夹爪或其他采摘工具进行采摘。
结构设计机械结构水果采摘机械臂主要由基座、臂体、关节、末端执行器等组成。
基座用于提供机械臂的稳定支撑,臂体由多段连接的杆件构成,关节用于连接相邻的臂体段,以实现机械臂的灵活运动。
末端执行器即水果采摘工具,它可以是夹爪、吸盘等,用于固定和采摘水果。
传感器在水果采摘机械臂中,传感器起着至关重要的作用。
通过安装距离传感器,可以实现对机械臂末端执行器与水果之间的距离测量和控制;通过安装力传感器,可以实现机械臂与水果的接触力检测,避免对水果造成损害;通过安装图像传感器,可以实现对水果的识别和定位。
工作流程1.图像采集:机械臂通过安装图像传感器来采集水果图像。
2.图像处理:利用计算机视觉技术对采集到的图像进行处理,实现对水果的识别和定位。
3.路径规划:根据水果的位置信息,机械臂进行路径规划,找到最短路径到达目标水果。
4.运动控制:根据路径规划结果,控制机械臂的关节运动,使机械臂到达目标水果的位置。
5.采摘水果:到达目标水果位置后,机械臂通过末端执行器进行水果的采摘。
6.返回初始位置:采摘完成后,机械臂返回初始位置,准备进行下一次采摘。
总结水果采摘机械臂的设计考虑了计算机视觉和机器人学的原理,通过识别和定位水果,实现了自动采摘的过程。
机械臂的结构和传感器的应用使其能够在复杂的环境下准确、高效地完成水果采摘任务。
随着技术的进步,水果采摘机械臂将逐渐替代传统的人工采摘方式,提高采摘效率,降低劳动强度。
一、概述菠萝是一种香甜可口的热带水果,它的采摘一直是一个需要大量人力成本和劳动力的过程。
为了提高采摘效率和降低成本,设计并试验了一种菠萝采摘机械手。
本文将介绍该机械手的结构设计以及试验结果。
二、机械手结构设计1. 机械手结构概述为了满足菠萝采摘的需求,机械手需要具备柔软兼具力度的特点以适应菠萝不同形状的茎和果实,同时还要能够快速且精确地进行抓取和切割操作。
机械手的结构设计需要兼顾这些因素。
2. 机械手结构分析机械手结构主要包括机械手臂、抓取器和切割器。
机械手臂需要具有柔韧性和稳定性,以适应菠萝的不规则形状。
抓取器需要具有足够的力度和灵活性,能够牢固地抓取菠萝,同时也要避免对果实造成损伤。
切割器要能够快速并且精确地进行切割操作,以保证菠萝采摘的效率和质量。
3. 机械手结构设计方案根据上述需求和分析,设计了一种机械手结构方案,采用柔性材料制作机械手臂,并配备有气动抓取器和快速切割器。
机械手臂采用多节段设计,能够在不同位置和角度进行伸缩和旋转,以适应不同形状的菠萝。
抓取器和切割器采用先进的材料和技术,能够在短时间内完成抓取和切割操作。
三、机械手试验1. 试验设计为了验证机械手的设计方案和性能,进行了一系列的试验。
试验主要包括机械手的灵活性和稳定性测试、抓取和切割操作的效率和准确性测试、以及对菠萝的损伤程度测试。
2. 试验结果分析通过试验发现,机械手的结构设计确实能够满足菠萝采摘的需求。
机械手臂的柔性和稳定性能够很好地适应菠萝的形状,抓取器和切割器的性能也能够满足快速和精确的操作。
机械手的操作也很少对菠萝造成损伤。
四、结论通过机械手的结构设计和试验结果分析,证明了该机械手的确能够提高菠萝采摘的效率和降低成本,为菠萝种植业的发展提供了有力支持。
然而,机械手在实际应用中仍存在一些问题,需要进一步的改进和优化。
在未来的研究中,将继续探索机械手在菠萝采摘中的应用,以便更好地服务于农业生产。
五、机械手的优化改进1. 机械手柔性材料的选择在实际应用中,发现机械手臂柔性材料的选择至关重要。
采摘机器人机械手结构设计与分析一、本文概述1、采摘机器人的研究背景和意义随着农业技术的快速发展和人口老龄化的加剧,传统的人工采摘方式已经难以满足现代农业生产的需求。
采摘机器人作为一种新型的农业机械设备,具有高效、精准、省时省力等优点,正逐渐成为农业领域的研究热点。
采摘机器人的研究和应用,不仅可以提高农作物的采摘效率和质量,降低人工成本,还可以改善农民的工作环境和条件,推动农业现代化的进程。
机械手作为采摘机器人的核心部件,其结构设计直接影响到采摘机器人的性能和稳定性。
因此,对采摘机器人机械手结构的设计与分析显得尤为重要。
通过对采摘机器人机械手结构的研究,可以深入了解其运动特性、受力情况和优化方案,从而提高采摘机器人的采摘效率和准确性,推动采摘机器人在农业生产中的广泛应用。
这也为农业机械化、智能化和自动化的发展提供了重要的技术支撑和理论基础。
研究采摘机器人机械手结构设计与分析具有重要的理论意义和实践价值,对于推动农业现代化和提高农业生产效益具有重要意义。
2、机械手在采摘机器人中的重要作用在采摘机器人中,机械手的作用至关重要。
作为采摘机器人的核心部件之一,机械手负责直接与目标农作物进行交互,完成识别、抓取、剪切和放置等一系列复杂动作。
这些动作的成功执行,直接决定了采摘机器人的工作效率、采摘质量和适应性。
机械手的设计直接决定了采摘机器人的工作能力。
通过合理的结构设计,机械手可以适应不同形状、大小和成熟度的农作物,实现精准、高效的采摘。
机械手的运动轨迹和速度控制也是影响采摘效率的关键因素。
因此,对机械手的精确控制是实现高效采摘的关键。
机械手的性能直接影响到采摘机器人的采摘质量。
在采摘过程中,机械手需要保持稳定的抓取力度,避免对农作物造成损伤。
同时,机械手还需要具备足够的灵活性和精度,以确保能够准确地将农作物采摘下来。
这些要求都对机械手的设计和制造提出了极高的挑战。
机械手的适应性也是采摘机器人性能的重要评价指标。
设计一个采摘机械手作为毕业设计是一个有趣和有挑战的项目。
以下是一个简要的设计方案:
1. 目标与需求分析:
-目标:设计一个能够自动采摘果实的机械手,提高采摘效率和减轻劳动强度。
-需求:机械手应具备准确的定位能力、稳定的抓取力度,并适应不同类型的果实。
2. 机械结构设计:
-手臂结构:选择合适的关节设计,使机械手具备较大的工作范围和灵活性。
-抓取器设计:根据果实的形状和大小,设计合适的抓取器,如夹爪、吸盘或夹子等,以确保稳定和安全地抓取果实。
3. 控制系统设计:
-定位系统:使用视觉传感器或激光测距仪等装置,实时识别果实的位置和姿态,并将数据传输给控制系统。
-运动控制:根据定位系统提供的数据,通过电动驱动或气动驱动等方式,控制机械手的运动,实现精确定位和抓取。
4. 自动化控制设计:
-控制算法:设计合适的算法,用于判断果实的成熟度、确定最佳采摘时机,并控制机械手的动作。
-用户界面:设计一个友好的用户界面,方便操作员监控和调整机械手的工作参数。
5. 安全性与可靠性设计:
-安全保护:考虑在机械手上安装传感器,如碰撞传感器或力传感器,以避免对果实和操作人员造成损害。
-可靠性测试:进行系统测试和验证,确保机械手在连续工作中的稳定性和可靠性。
6. 性能评估与改进:
-进行实地测试和评估机械手的采摘效率、准确性和稳定性。
-根据实际使用情况,收集反馈意见并进行改进,优化机械手的设计和性能。
以上是一个初步的设计方案,具体实施过程中需要根据自身的条件和资源对细节进行调整和完善。
另外,为确保设计的可行性和安全性,建议与导师和相关专业人士进行深入讨论和指导。
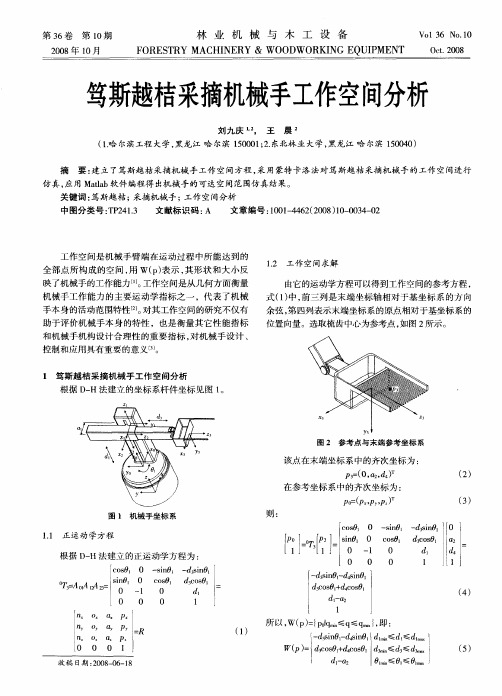
水果无损采摘机械手工作空间分析及参数确定刘燕德ꎬ王观田ꎬ王均刚ꎬ舒盛荣(华东交通大学机电与车辆工程学院ꎬ南昌㊀330013)摘㊀要:水果采摘机器人在我国起步晚㊁发展缓慢ꎬ没有系统的方法用以设计采摘机械手ꎬ特别是机械手参数确定方法不成熟ꎬ造成工作空间浪费㊁影响机械性能等问题ꎮ为此ꎬ提出了一种蒙特卡洛法结合控制变量确定摆动关节范围的设计方法ꎬ利用D-H参数法对机械手臂进行正运动学分析ꎬ在MatLab平台下用蒙特卡洛法计算机械手的工作空间ꎬ并结合控制变量法ꎬ求出不同参数下的工作空间范围ꎬ根据相对较合理的工作空间范围ꎬ确定机械手臂的合理参数ꎮ以水果无损采摘机械手为例ꎬ根据具体设计要求ꎬ确定了手臂长度ꎬ利用蒙特卡洛法确定了摆动关节的转角范围ꎬ并验证参数的正确性ꎮ结果表明:该方法可以迅速有效地确定摆角范围ꎬ解决了以往摆动关节转角范围靠设计经验确定而存在的空间浪费的问题ꎮ关键词:水果无损采摘机械手ꎻ工作空间ꎻ摆动关节ꎻD-H参数法中图分类号:S225ꎻTP242㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)04-0012-060㊀引言水果采摘机器人是一类以水果为工作对象㊁通过机器视觉和编程具有感知能力的农业机器人ꎮ采摘机器人能够提高采摘效率和采摘质量ꎬ保证果蔬及时采摘ꎬ大幅度降低果农的劳动强度和生产成本[1-2]ꎮ20世纪80年代开始ꎬ美国㊁日本㊁法国㊁荷兰等发达国家开始在收获机器人上做了大量的研究[3-7]ꎮ我国目前仍处于起步阶段ꎬ但随着技术的不断发展及我国许多科研院校的研究深入ꎬ也取得了一定的研究成果ꎬ同类型的采摘机器人也在不断地更新及本土化ꎮ目前ꎬ机械手设计过程参数的确定没有理论依据ꎬ有时靠经验取得ꎬ势必造成设计不合理ꎬ影响机械性能ꎮ国内许多学者在机械手设计方面做了大量研究ꎬ但关于机械手参数的确定文章较少ꎬ更没有对参数确定的方法进行说明ꎮ工作空间的分析有图解法㊁数值法和解析法ꎮ图解法和解析法只适合于自由度及杆件数目较少的机械臂的工作空间分析ꎬ而数值法需要大量的计算ꎬ计算公式复杂多变ꎮ本文采用由数值法简化后结合随机数计算的方法(即蒙特卡洛法)ꎬ具有计算量少及准确性高等优点[8]ꎮ本文利用D-H法对机械手臂进行正运动学分收稿日期:2017-11-28基金项目:国家自然科学基金项目(51765020)ꎻ江西省自然科学基金项目(20161BAB206153)作者简介:刘燕德(1967-)ꎬ女ꎬ江西吉安人ꎬ教授ꎬ博士生导师ꎬ(E-mail)sduhys@163.comꎮ析ꎬ在MatLab平台下用蒙特卡洛法计算机械手的工作空间ꎬ结合控制变量法ꎬ确定不同参数下的工作空间范围ꎬ根据相对较合理的工作空间范围ꎬ反推机械手臂的合理参数ꎮ1㊀基于工作空间反馈确定水果采摘机械手关节参数的方法水果采摘机械手的机构设计与采摘对象和工作环境密切相关ꎬ需根据要求确定机械手机构类型ꎮ自由度是衡量机械手柔软程度的尺度ꎬ表示机械手所拥有的独立运动的数量ꎮ机械手自由度数越多ꎬ灵活度越高ꎻ但同时机构也会变得越复杂ꎬ控制难度越大ꎬ质量越大ꎮ自由度的确定根据具体采摘环境和要求等多方面综合考虑ꎮ1.1㊀机械手杆件参数确定方法机械手的基本参数包括各手臂的长度及关节的转角范围ꎬ这些参数都关系到机械手工作空间的大小与形状ꎮ手臂的长度即为连杆的长度ꎬ根据机器人学原理可知:机械手各连杆长度之和需要大于等于采摘范围的最大值ꎬ连杆总长度保持不变ꎬ工作空间大小也不变ꎮ所以ꎬ在确定机械手实际采摘范围后ꎬ就可确定机械手连杆总长ꎮ在各个连杆长度满足机械要求的情况下ꎬ遵循机器人学原理ꎬ机械臂类似人类手臂ꎬ大臂的长度与小臂和末端执行器的长度之和相等[9-10]ꎮ1.2㊀机械手正运动学分析正运动学分析是计算机械手作业空间的前提ꎬ正2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期运动学方程为机械手臂工作空间的计算提供理论依据ꎮDenavit和Hartenberg于1995年提出了一种为关节链中的每一杆件建立坐标系的矩阵方法ꎬ即D-H参数法ꎮ每个关节处都建立起自己的独立坐标ꎬ通过D-H坐标转换矩阵将手爪的坐标转换成基座的固定坐标ꎬ就可以得到手爪在固定坐标的位置ꎮ根据D-H参数法相应两个连杆之间的坐标变换的通式为nTn+1=An+1=Rot(zꎬθn+1)ˑTran(0ꎬ0ꎬdn+1)ˑTran(an+1ꎬ0ꎬ0)ˑRot(xꎬan+1)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀=cosθn+1-sinθn+1cosαn+1sinθn+1sinαn+1an+1cosθn+1sinθn+1cosθn+1cosαn+1cosθn+1sinαn+1an+1sinθn+10sinαn+1cosαn+1dn+10001éëêêêêêùûúúúúú(1)㊀㊀工作空间是指机械手的自由端(末端执行器前端)在空间可移动的范围ꎬ也叫作业空间[11]ꎮ通过坐标转换后ꎬ机械手末端坐标系关于基座坐标系所有位置点的集合就是机械手臂的工作空间范围ꎬ这也是蒙特卡洛法的原理ꎮ对于机械手臂来说ꎬ变量为各关节的转动角度θꎬ各关节的转动角度确定后ꎬ机械手末端的位置就确定了ꎻ当所有关节转动角度在其取值范围内随机遍历取值后ꎬ所得到的末端点的集合就是机械手臂的工作空间范围ꎮ蒙特卡洛法是一种通过随机取样的方式来解决数学问题的方法ꎬ可应用于研究随机物理现象ꎮ研究机械手末端到达空间的位置就可使用蒙特卡洛法ꎬ即机械手末端到达的某个空间位置是随机发生的ꎬ这样取得的随机样本就能够充分展示机械手的工作空间ꎮ机械手各关节在其相应的活动范围内工作ꎬ各个关节在其取值范围内随机取值后ꎬ机械手末端点就会有一个随机值的集合ꎬ这些值的集合就构成了机械手的工作空间ꎮ运用蒙特卡洛法计算工作空间的步骤如下:1)对机械手进行正运动学分析ꎬ求得机械手末端的位置矩阵ꎻ2)确定随机取样的样本数Nꎬ在计算机性能承受范围内取最大ꎻ3)利用MatLab函数rand()取随机值ꎬ计算各关节在取值范围内的随机值ꎬ计算公式为θi=θimin+(θimax-θimin)rand(N)(2)式中㊀θi 关节i转动范围的随机值ꎻ㊀θimax 关节i转动范围的最大值ꎻ㊀θimin 关节i转动范围的最小值ꎮ4)编写算法程序ꎬ在MatLab中绘制机械手工作空间点云图ꎮ1.3 机械手关节参数确定方法关节的转角范围关系到机械手末端能够到达的平面范围ꎬ根据采摘对象植株的生长情况ꎬ可以得到实际的工作空间ꎻ结合控制变量法ꎬ求出不同参数下的工作空间范围ꎻ根据相对较合理的工作空间范围ꎬ反推机械手臂的合理参数ꎮ机械手的工作空间必须覆盖实际的工作空间ꎬ以此确定所有参数ꎮ图1是本文确定关节转动范围的流程图ꎮ在确定机构类型和自由度后ꎬ应当选取合适的关节类型ꎮ本文根据反馈的思想ꎬ结合控制变量的研究方法ꎬ用MatLab描画不同摆动范围下的工作空间ꎬ根据采摘目标空间与该工作空间的对比ꎬ找出最合适的工作空间ꎬ以该工作空间对应的摆角范围为最佳摆角范围ꎮ图1㊀基于工作空间反馈的水果采摘机械手关节参数确定方法流程图Fig.1㊀FlowChartofMethodforDeterminingJointParametersofFruit㊀㊀㊀㊀㊀㊀PickingManipulatorBasedonWorkSpaceFeedback具体的做法:选定一个变量ꎬ取不同的范围ꎬ其他变量固定为0ꎮ其他变量固定为0表示该关节一直处于初始位置ꎬ这样便使得其他变量对该变量的影响控制在最低ꎬ确保结果的正确性ꎮ每取一个变量值范围ꎬ就能描画一个工作空间ꎬ最后能够得到该变量不同范围下的有限个工作空间形态ꎮ描画工作空间的前提是需要得到机械手末端在2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期固定原点坐标下的空间坐标表达方式ꎮ本文采用D-H参数法得到每个杆件坐标系的矩阵ꎮꎬ得到式(1)所示矩阵ꎮ通过简化ꎬ得到机械手所有杆件坐标系的矩阵为0T1=a11a12a13a14a21a22a23a240a32a33a340001éëêêêêêùûúúúúú1T2=b11b12b13b14b21b22b23b240b32b33b340001éëêêêêêùûúúúúú㊀㊀㊀⋮n-1Tn=N11N12N13N14N21N22N23N240N32N33N340001éëêêêêêùûúúúúú(3)机械手末端相对于基座坐标的坐标系矩阵为0Tn=0T11T2 n-1Tn=nxoxaxpxnyoyaypynzozazpz0001éëêêêêêùûúúúúú(4)其中ꎬ位置矩阵P=pxpypzéëêêêêùûúúúú表示机械手末端在基座坐标系的空间位置ꎬpx㊁py㊁pz分别为机械手末端在基座坐标系中X轴㊁Y轴㊁Z轴的坐标表达式ꎮ用蒙特卡洛法得到变量的随机值ꎬ将这些随机值带入位置矩阵Pꎬ就能得到末端点随机位置的集合ꎬ这个集合就是机械手工作空间ꎮ对每个工作空间做好标记ꎬ当找到符合要求的工作空间形态时ꎬ根据标记确定此工作空间的变量值范围ꎬ将其定为最终结果ꎬ接着确定下一个变量值范围ꎮ重复此过程ꎬ确定结果ꎬ直到所有变量都已选取ꎬ得到最终结果后ꎬ所有摆动关节的转角范围就确定了ꎮ机械手最难确定的参数已经确定ꎬ按此方法得到的参数描画的工作空间形态与采摘目标空间形态相似度较高ꎮ本文的方法解决了摆动关节摆角范围难确定的问题ꎬ同时解决了工作空间浪费的问题ꎮ2 五自由度采摘机械手的运动分析与参数确定五自由度机械手中包括:基关节ꎬ有1个旋转自由度ꎻ肩关节ꎬ有1个摆动自由度ꎻ肘关节ꎬ有1个摆动自由度ꎻ两个腕关节ꎬ腕关节1有摆动自由度ꎬ腕关节2有旋转自由度ꎮ设定各关节的变量为θ1=θ2=θ3=θ5=0㊁θ4=90ʎꎬ这样设变量后能更加直观地观察机械手臂的空间位置ꎮ根据设定的关节变量做出的机械手臂各关节坐标系如图2所示ꎮ图2㊀机械手臂关节坐标图Fig.2㊀CoordinateDiagramofManipulatorJoint根据连杆确定的D-H参数如表1所示ꎮ表1㊀D-H参数表Table1㊀D-Hparametertable连杆aαdθ1090ʎd1θ12a200θ23a300θ34090ʎ0θ4500d4θ5㊀㊀将各个连杆的参数代入D-H法坐标变换的通式ꎬ则手爪相对于基座的坐标变换的矩阵为0T5=0T11T22T33T44T5=nxoxaxpxnyoyaypynzozazpz0001éëêêêêêùûúúúúú其中ꎬ位置矩阵P=pxpypzéëêêêêùûúúúú是需要用到的ꎮ将θ1=θ2=θ3=θ5=0㊁θ4=90ʎ代入等式ꎬ得此时的位置矩阵为Px=cosθ1(d5sinθ4cosθ2cosθ3-d5sinθ4sinθ2sinθ3+d5cosθ4cosθ2sinθ3+d5cosθ4sinθ2cosθ3+a3cosθ2cosθ3-a3sinθ2sinθ3+a2cosθ2)Py=sinθ1(d5sinθ4cosθ2cosθ3-d5sinθ4sinθ2sinθ3+d5cosθ4cosθ2sinθ3+d5cosθ4sinθ2cosθ3+a323-a3sinθ23+a222019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期Pz=sinθ4(sinθ2cosθ3+cosθ2sinθ3-d5cosθ4ˑ㊀㊀㊀㊀(-sinθ2sinθ3+cosθ2cosθ3)+a3sinθ2cosθ3+㊀㊀㊀㊀a3cosθ2sinθ3+a2sinθ2+d1(6)P=d5+a3+a20d1éëêêêêùûúúúúꎬ与图2设定的位置一致ꎬ说明机械臂运动方程正确ꎮ根据设计要求和目标ꎬ结合相关机器人学原理ꎬ机械手臂连杆长度值确定如下:回转腰部(d1)为289mmꎬ大臂(a2)为300mmꎬ小臂(a2)为375mmꎬ腕关节(d5)为100mmꎮ摆动关节转角范围受机械手臂运动的限制ꎬ摆角范围不能定为全空间范围ꎮ为确定摆角范围ꎬ通过控制变量法ꎬ计算在不同摆角范围内机械手臂的工作空间范围ꎬ选取工作空间范围最合适时对应的摆角范围ꎬ定为该关节的摆角范围ꎮ由于计算机内存的限制ꎬ在此取4000个点来描画工作空间ꎮ计算机械手臂工作空间的步骤如下:1)利用MatLab中rand函数求取各关节变量在取值范围内的随机值ꎬrand(4000)函数将会在0~1内产生j个随机数ꎮ产生各关节变量在取值范围内的随机值ꎬ即θi=θimin+(θimax-θimin)rand(4000)(7)2)将上面得到的随机值代入正运动学方程的位置矩阵ꎬ得到末端点关于基座坐标的坐标点集ꎻ将点显示在坐标上ꎬ就得到机械手臂工作空间点云图ꎮ2.1 θ2变化时机械手的工作空间控制d1㊁a2㊁a3㊁d5㊁θ1㊁θ5不变ꎬθ3=θ4=0ꎬ肩关节θ2选取如下几组范围ꎬ即-π4ꎬπ4æèçöø÷㊁-π2ꎬπ2æèçöø÷ꎬ-3π4ꎬ3π4æèçöø÷㊁-π2ꎬ0æèçöø÷㊁0ꎬπ2æèçöø÷ꎮ相应的工作空间范围如图3所示ꎮ由图3可知:肩关节的转角存在最佳转角范围ꎮ所谓最佳转角范围ꎬ即机械手工作空间在此范围内有最大值ꎮ转角范围增大并不会使工作空间增大ꎬ而转角范围减小会导致工作空间缩小ꎮ肩关节的有效转角为-π2ꎬπ2æèçöø÷ꎮ肩关节转角范围关于转角原点对称ꎬ当转角范围取最佳转角对称的1/2时ꎬ工作空间范围相应是最大空间的1/2ꎬ则确定肩关节摆角范围为-π2ꎬπ2æèçöø÷ꎮ2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期图3㊀θ2取不同范围时的工作空间形态Fig.3㊀TheWorkingSpaceofθ2withDifferentRange2.2㊀θ3变化时机械手的工作空间控制d1㊁a2㊁a3㊁d5㊁θ1㊁θ5不变ꎬθ2=θ4=0ꎬ肩关节θ3选取-π4ꎬπ4æèçöø÷㊁-π2ꎬπ2æèçöø÷㊁-3π4ꎬ3π4æèçöø÷㊁-π2ꎬ0æèçöø÷㊁0ꎬπ2æèçöø÷几组范围ꎮ同理ꎬ可求得不同范围的工作空间ꎬ肘关节的转角在对称范围时ꎬ转角范围越大ꎬ工作空间越大ꎮ当转角范围大于-π2ꎬπ2æèçöø÷时ꎬ随着转角范围的增大ꎬ工作空间增大放缓ꎻ当转角范围不是对称空间时ꎬ机械臂工作空间相应地不对称ꎬ而且空间大小迅速减小ꎮ根据机械人学原理ꎬ摆动肘关节的转角定为-3π4ꎬ3π4æèçöø÷ꎮ2.3㊀θ4变化时机械手的工作空间控制d1㊁a2㊁a3㊁d5㊁θ1㊁θ5不变ꎬθ2=θ3=0ꎬ肩关节θ4选取-π4ꎬπ4æèçöø÷㊁-π2ꎬπ2æèçöø÷㊁-3π4ꎬ3π4æèçöø÷㊁-π2ꎬ0æèçöø÷㊁0ꎬπ2æèçöø÷几组范围ꎮ同理ꎬ可求得不同范围的工作空间ꎮ肘关节的转角在对称范围时ꎬ转角范围越大ꎬ工作空间越大ꎻ当转角范围不是对称空间时ꎬ机械臂工作空间呈现不同的形状ꎬ而且空间大小迅速减小ꎮ根据机械人学原理ꎬ摆动肘关节的转角定为-3π4ꎬ3π4æèçöø÷ꎮ根据以上实验结果得知ꎬ各个关节的规律有所不同ꎮ通过控制变量法结合D-H参数法ꎬ采用在Mat ̄Lab平台描画机械臂工作空间的方法ꎬ确定符合要求的最优关节转角范围分别为θ2=-π2ꎬπ2æèçöø÷㊁θ3=-3π4ꎬ3π4æèçöø÷㊁θ4=-3π4ꎬ3π4æèçöø÷ꎮ最终ꎬ所设计的五自由度机械手的工作空间如图4所示ꎮ由工作空间形状图可知:此机械手的工作空间呈椭球状ꎮx轴范围为(-800ꎬꎬ800)ꎬy轴范围为(-800ꎬ800)ꎬz轴范围为(-500ꎬ1100)ꎮ仿真得到的工作空间完全覆盖实际工作范围ꎬ且工作空间的形状符合脐橙树中脐橙分布情况ꎮ使用本文方法可以得到合适的参数ꎬ解决了依靠经验确定参数导致工作空间浪费㊁影响机械性能等问题ꎮ2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期图4㊀机械手工作空间形态Fig.4㊀WorkspaceofManipulator3㊀结论1)摒弃传统夹持式执行末端ꎬ采用切断的方式采摘ꎬ最大限度地减少对果实的损伤ꎬ提高采摘质量ꎮ使用旋转嘴将果实捞拢的方式使果实定位ꎬ同时设有临时储果仓ꎬ连续采摘数次后将果实放入指定框ꎬ可极大提高采摘效率ꎮ2)关节转角范围关于转角原点对称ꎮ当转角范围取最佳转角对称的1/2时ꎬ工作空间范围相应是最大空间的1/2ꎮ转角范围越大ꎬ工作空间越大(肩关节除外)ꎮ当转角范围不是对称空间时ꎬ机械臂工作空间呈现不同的形状ꎬ而且空间大小会变化ꎮ3)肩关节的转角存在最佳转角范围ꎬ即机械手工作空间在此范围内有最大值ꎮ转角范围增大并不会使工作空间增大ꎬ而转角范围减小会导致工作空间缩小ꎮ参考文献:[1]㊀顾宝兴.智能移动式水果采摘机器人[D].南京:南京农业大学ꎬ2012:1-41.[2]㊀张洁ꎬ李艳文.果蔬采摘机器人的研究现状问题及对策[J].机械设计ꎬ2010ꎬ27(6):1-3.[3]㊀JianSꎬSunXYꎬZhangTZꎬetal.Designandexperimentofopeningpickingrobotforeggplant[J].TransactionsoftheChineseSocietyforAgriculturalMachineryꎬ2009ꎬ40(1):143-147.[4]㊀VanHentenꎬE.J.Robotpickscucumbersinagreenhouse[J].EngineeringandTechnologyforSustainableWorldꎬ2005ꎬ12(7):5-6.[5]㊀TanigakiꎬKanae.FujiuraꎬTateshil.AkaseꎬAkiraCherry-har ̄vestingrobot[J].ComputersandElectrocsinAgricultureꎬ2008ꎬ63(1):65-72.[6]㊀NKondoꎬYNishitsujiꎬPPLingꎬetal.Visualfeedbackguidedroboticcherrytomatoharvesting[J].TransactionsoftheASAEꎬ1996ꎬ39(6):2331-2338.[7]㊀ShigehikoHayashi.Evaluationofastrawberry-harvestingro ̄botinafieldtest[J].BiosystemsEngineeringꎬ2010ꎬ105:160-171.[8]㊀张盛ꎬ李艳聪ꎬ郑爽爽ꎬ等.浅析果蔬采摘机械人研究现状[J].科技创新与应用ꎬ2015(30):48-49. [9]㊀日本机器人学会.机器人技术手册[K].宗光华ꎬ刘海波ꎬ程君实ꎬ译.1版.北京:科学出版社ꎬ1996:175-180. [10]㊀刘淑英ꎬ张明路ꎬ韩慧伶.五自由度机械手动力学分析与仿真[J].河北工业大学学报ꎬ2009(2):32-36. [11]㊀王建军.搬运机械手仿真设计和制作[J].机械设计与制造ꎬ2012(9):146-148.WorkspaceAnalysisandParameterDeterminationofFruitNondestructivePickingManipulatorLiuYandeꎬWangGuantianꎬWangJungangꎬShuShengrong(SchoolofMechanotronics&VehicleEngineeringꎬEastChinaJiaotongUniversityꎬNanchang330013ꎬChina)Abstract:Thefruitpickingrobotinourcountrystartedlateanddevelopedslowlyꎬthereisnosystematicapproachtothedesignofpickingmanipulator.Especiallythemethodofmanipulatorparameterisnotmaturewhichresultedinawasteofspaceꎬtheworkingeffectofmechanicalproperties.InthispaperꎬakindoffruitpickingmanipulatorisdesignedꎬandbasedontheMonteCarlomethodproposedadesignedmethodofjointswingtodeterminethescopeofthecontrolvaria ̄blesandusedthemethodofD-Htheparametersforkinematicsanalysisofmechanicalarm.TheMatLabplatformusestheMonteCarlomethodtocalculatetheworkingspaceofthemanipulatorꎬandcontrolsvariablemethodꎬcalculatesthedifferentparametersoftheworkꎬthenaccordstotherelativelyreasonableworkscopeꎬdeterminingthereasonableparam ̄etersofthemechanicalarm.Finallyꎬtakenanexampleoffruitnondestructivepickingmanipulatorꎬbaseonthespecificdesignrequirementsanddeterminethelengthofthearmisdeterminedbyusingthejointanglerangeofswingmethod.Lastlyꎬitverifiesthecorrectofparametersꎬtheresultsshowingthatthemethodcanquicklyandeffectivelydeterminetheangularrangeandsolvetheswingthejointanglerangeondesignexperiencetodeterminethespatialwasteproblems.Keywords:fruitnondestructivepickingmanipulatorꎻworkingspaceꎻswingjointꎻD-Hparametermethod2019年4月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第4期。