卷取机控制模式与带尾定位计算方法
- 格式:pdf
- 大小:132.81 KB
- 文档页数:4

地下卷取生产中的侧导板的控制摘要:本文主要介绍攀钢热轧厂中地下卷取机中的侧导板的控制原理、短行程控制、本体调节以及控制过程。
关键词:侧导板短行程本体调节控制1 侧导板自动控制原理侧导板每边由一个液压缸通过伺服阀单独控制,两个位置传感器用于侧导板开口度控制,四个压力传感器用于其压力调节,每种控制方式必须在hmi上进行选择,选择不同方式可进行许多种组合完成所需要的功能。
2 侧导板的短行程控制(1)头部和尾部方式。
地下卷取系统准备卷取时,侧导板按带钢宽度再在每边增加50mm的宽度打开;当带钢头部进入到侧导板一半时,侧导板的宽度每边减少25mm;当带钢头部在夹送辊中检测到时,侧导板的宽度再每边减少10mm;最后,卷筒建立起负载时,侧导板的宽度也减少至带钢宽度加20mm,这时侧导板进入本体调节方式。
当带钢尾部接近侧导板时,侧导板的宽度每边增加25mm,防止尾部呈喇叭型展开,撞坏侧导板。
(2)仅有头部方式。
这种方式基本与头部和尾部方式相似,只是当带钢尾部接近侧导板时,侧导板的宽度不增加,这种方式主要是操作工根据尾部是否呈喇叭型展开选择,如果无喇叭型展开可选择该方式。
(3)无短行程方式。
这种方式无自动短行程控制,主要是操作工选择,如果头部能安全进入卷取机,操作工在hmi上可手动关闭侧导板宽度。
短行程控制,或者如果下一带钢为弧型时操作工通常选择该方式。
3 侧导板的本体调节该种方式在hmi上操作工可进行三种选择,即恒压力调节方式、恒开口度调节方式和振荡控制方式。
3.1 恒压力调节方式当卷筒建立负载时,侧导板宽度位置控制切换到压力控制。
这时,判断操作侧或传动侧哪侧为主调节,选择为主调节那侧为压力调节,另一侧为辅助位置调节,(1)首先根据带钢的宽度、厚度、卷取温度和带钢材质计算出侧导板的压力给定值,其计算如下:y=127486+196·(650-t)(n/mm2) (1)y——杨氏模数;t——卷取温度;f=(π2·y·h2·l)/(12·w)2(n)(2)f——侧导板对带钢的压力;h——带钢厚度;l——侧面导板长度;w——带钢宽度。

浅论热轧带钢卷取钢卷的卷形控制浅论热轧带钢卷取钢卷的卷形控制仲昭平(⽇照钢铁有限责任公司,⼭东⽇照276806)摘要:针对热轧钢带卷取成型过程中产⽣的钢卷不良问题。
从⼯艺过程和控制过程对各种形态的塔形产⽣的机理进⾏了分析。
以提⾼钢带卷⼀次成材率提⾼热轧钢带卷直发率为⽬标提出并实施应⽤新的控制思想和⽅法。
关键词:卷取;塔形;原因分析;改进控制;Abstract : Thetelescoping problens with coiling hot rolled strip steel are conce rned with in the article。
the formation mechanism of various telescopes are elucidated in terms of the processes and controls employed in coiling and a new control method is propose and put into USE , in order to increase the primary acceptance rate of hot 2rolled strip coil , and to maximize its direct 2delivery rate。
Finally 。
Key words: coiling ;telescope ; failure analysis ; improved control结构⽰意图⼀、卷取控制的主要设备和⼯艺⽇照钢铁2150热轧带钢⼚,⽣产1110~2150 mm宽、 1.5~24.5 mm 厚的钢带产品。
控制系统采⽤西门⼦公司TDC (Technology and Drive Control)。
在钢带卷机中,参与卷取过程控制的主要设备是卷筒、夹送辊、助卷辊和侧导板等。
当钢带头出层流冷却区后,由侧导板引导,进⼊夹送辊,在上夹送辊的压⼒下钢带头部向下经斜槽板进⼊卷筒和助卷辊,助卷辊把钢带压靠卷筒,卷⼊3-4圈后卷筒开始涨径,使钢带紧紧的缠绕在卷筒上,完成卷取穿带过程。


最新文件---------------- 仅供参考--------------------已改成-----------word文本 --------------------- 方便更改赠人玫瑰,手留余香。
1 概述 (3)2 卷取机的主函数 (6)2.1 带钢数据存储 (6)2.2 带钢跟踪系统 (7)2.3 卷取机操作 (8)2.4 仿真:模拟轧制 (10)2.5 输出辊道 (11)2.6 卸卷和运输机系统 (13)3 卷取机特定功能 (15)3.1 卷取机辊缝控制 (16)3.1.1 侧导板 (16)3.1.2 夹送辊辊缝和力矩控制 (22)3.1.3 助卷辊辊缝调节 (25)3.2 地下卷取机辅助功能 (30)3.2.1 入口活门 (30)3.2.2 芯轴外置轴承座 (30)3.2.3 芯轴张力 (31)3.2.4 轧辊和带钢冷却 (32)3.2.5 带卷的直径计算: (33)3.2.6 卷重的计算: (34)3.2.7 物料跟踪: (35)3.3 地下卷取机驱动 (37)3.3.1 夹送辊驱动 (37)3.3.2 助卷辊驱动器 (42)3.3.3 芯轴驱动 (44)4 钢卷卸卷 (51)4.1 1#运卷小车 (51)4.2 钢卷卸卷站操作 (53)4.2.3 中转车 (56)5 钢卷运输链 (57)5.1 概述 (57)5.2钢卷运输链操作 (58)5.3 1#运输链 (59)5.4 1# - 10#步进梁 (59)5.5 1#升降/旋转台 (60)5.6 2#转台 (60)5.7 打捆机 (60)5.8 称重机 (61)5.9 喷号机 (62)1 概述地下卷曲机的一级基础自动化和控制系统是基于SIMATIC 技术的TDC系统。
硬件有3个SIMATIC自动化技术的远程计算机输入和输出站。
地下卷取机的一个机架用于卷曲机的主令功能另外两台用于卷取机的特定功能.卷取机到的主令功能如下:·卷取机准备操作·带钢跟踪·带钢数据处理·和其他的自动化机架通讯·输出辊道控制·卸卷和输送机系统卷取机的特定功能适用于每一台特定操作的卷取机。
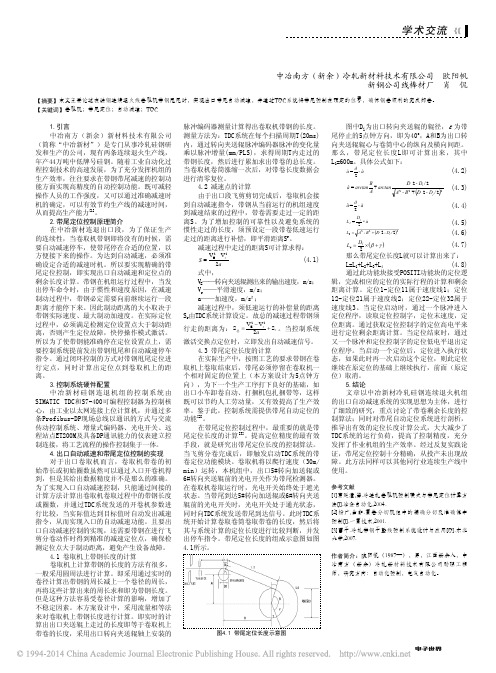
带尾控制装置1 带尾停止装置带钢在卷取结束时卸卷小车将带卷托起卸卷,为了使小车不挤伤带卷头部,同时不使带卷头部松散,带钢的尾部要求停留在如图11111左、右下侧60°的停止位置。
分段剪图11111带尾停止位置2 带尾停止位置控制原理经过分段剪剪切以后,带钢尾部经过如图2222所示的光电探测器(PH),开始触发带尾停止控制程序,编码器纪录带尾行走的距离,到达规定距离时自控系统下达停车命令,卷取机停止运行,带尾到达停止位置,过程如图2222所示。
图2222尾部停止位置计算原理图图2222中,B为出口转向辊与卷取机芯轴的垂直、水平距离,L1为光电探测器至转向辊的水平距离,L2为带钢对于转向辊的包角长度,L3为带钢与转向辊与卷取带卷相切点之间的距离,L4为停止卷取之后带钢尾部由卷取状态垂到停止位置所需的长度,R为已卷取带卷的致敬,r为转向辊的直径,α为带钢对于转向辊的包角,β为α的余角,δ为带尾停止位置角度,ε为转向辊与芯轴中心连线和正在卷取带钢的夹角。
带钢卷取方式为上卷取和下卷取,以上卷取为例,介绍带尾停止位置的控制方式。
带尾经过光电探测器之后,自控系统开始计长,当带尾行走1234L L L L L =++-的距离时,到达停止位置。
根据几何关系计算公式如下:1234L L L L L =++-……①()1L r R απαδ=++-……② 2παβ=-……③arctan arctan B B A A βε=+=+ 将式③,式④带入式②中,得1arctan 2L L r π⎛⎫ ⎪=+-+ ⎝3arctan 2B R A πδ⎛⎫ ⎪--- ⎪ ⎪ ⎪⎝⎭……⑤ 式⑤为带尾经过检测光电开关之后继续运行的距离,停车之后带尾自然下垂到停止位置。
下卷取原理与上卷取相同,带尾行走的距离公式为1234L L L L L =+++,计算方式相同。
冷连轧卷取机控制模式与带尾定位计算方法冷轧带钢在正常轧制后,通过冷连轧机、剪前夹送辊、飞剪、剪后转向辊后,经卷取机卷取成一定卷径的钢卷。
在轧钢工艺上,冷连轧机的末机架到卷取机的整个区域称为轧制线的出口(或称出口部分) 。
出口是冷连轧线上的最后环节,在卷取机上卷取的钢卷即为冷连轧的最终成品。
最终成品的质量当然与轧机各机架的控制有关,如厚度控制(AGC) 、位置控制(APC) 、张力控制(ATC) 等。
出口部分并不能改变带钢的质量指标,但是高质量的成品若在出口部分处理不当,将会使其成为废品或
次品,这是我们所不期望的。
为此在卷取机卷取过程中,我们关心的是: (1) 卷取机如何咬钢,才能使卷取机开始正常卷取,更好地配合连轧机
的正常轧制;
(2) 卷取机在卷取过程中带钢承受的张力不同,其张力应如何设定;
(3)“剪切完”信号发出后,带钢带尾的速度如何设定以及带尾如何定位。
1 卷取机咬钢速度给定曲线的确定
飞剪在每次剪切完成后,下一卷带钢的带头即出现在飞剪处,在剪
前夹送辊的牵引下,带头进入剪后夹送辊,之后被送入卷取机,此时卷取机进入咬钢状态。
倘若卷取机咬钢不利,以轧制速度前进的带钢势必在卷取机旁形成堆积,造成事故停车。
为了顺利咬钢,咬钢时卷取机应采用斜坡函数速度给定,并以正、反向交替工作模式进行,这样才能使带头顺利咬入。
咬钢时的速度给定较低,其斜率与幅值PLC给出,它要根据带钢的材质、厚度等参数以及轧制工艺要求决定。
2 卷取机卷取过程中张力的设定
卷取机一旦完成咬钢,带钢即要承受一定的张力,以保证带钢卷取
的质量。
该张力是在卷取机与冷连轧机之间形成的。
在卷取机卷取的各个阶段,带钢承受的张力不同。
在咬钢过程中,为使带钢从卷芯开始卷取紧实,卷取机一旦咬住带头,就要以较大的张力值进行卷取,此时的张力通常比正常轧制时的张力要大。
在卷取机卷取过程中,卷径不断增大,当卷径达到一定数值Φ0 时,应当把张力降下来,以正常轧制张力进行卷取。
张力降下来后,由于时间较短,卷径变化并不大,为Φ1 。
从卷取的整个进程来看,这个阶段时间最长、卷径变化最大,直到卷径接近剪切时的卷径Φ2 。
而在剪切(卷经为Φc) 的时候,带钢需要承受较小的张力,以利于剪切,所以此时通过剪前夹送辊建张的办法把带钢张力降低为剪切张力。
图3中的各张力值都是由PLC根据工艺要求给出的。
剪切后的带钢经带尾定位后,卷在卷取机上,被卸卷小车运走,这样就完成了一卷带钢的轧制与卷取的任务。
图 3 带钢张力设定
3 带尾定位速度的设定
当剪切发生时,飞剪将带钢剪切成两部分,前一部分继续在卷取机上进行卷取,后一部分继续向前运行,准备在另外一卷取机(冷连轧生产线上有两个卷取机,以保证生产的连续性) 上进行卷取。
为此,当“剪切完”信号发出后,必须对卷在卷取机上的带钢带尾进行加速,以使得当前卷的卷尾和新卷的卷头尽快分离。
带尾离开公共区(飞剪和剪后夹送辊
之间)后,进入定位和减速阶段。
带尾脱离公共区的信息通过局部跟踪实现。
“剪切完”信号发出后启动跟踪,以便为定位系统操作提供实际长度检测信号,作为定位长度计算的修正值。
带尾定位速度需满足V d = V1 + V0
式中, V d ——定位速度,m/ min ;
V1 ——剪切时冷连轧机末机架出口速度,m/min ;
V0 ——超速度,m/ min。
V0 与卷取机的带尾定位速度相关。
4 带尾定位长度计算方法
当带钢全部缠在卷筒上后,带尾不是可以落在带卷圆周的任意点上,而是落在带卷圆周的一个固定位置上。
这是生产工艺的要求,必须得到满足。
带尾定位过程中最重要的就是定位速度和定位长度,定位速度在前面已进行了描述,这里主要计算定位长度。
定位长度的计算在“剪切完”信号发出后开始,直到定位完成时结束。
定位长度依赖于卷径大小。
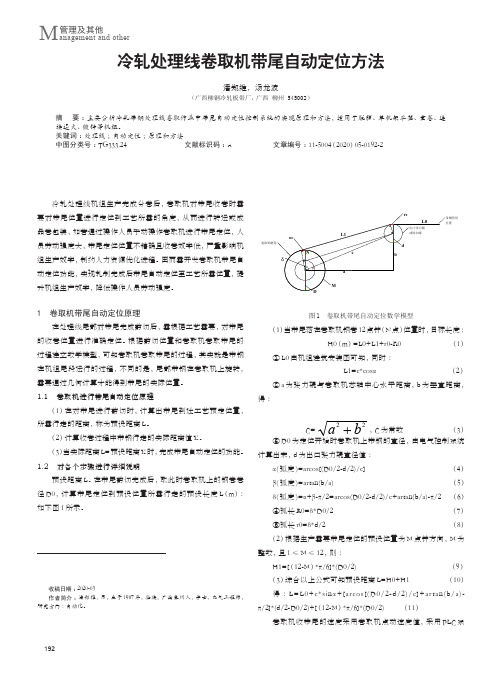
计算示意图见图5。
由于卷径D 比剪后夹送辊直径d 大很多,故定位长度采用以下算法。
定位长度
l = I + D/2*(3π/2- α0 - α- β
式中, I = (I20 -(D –d)2/4)1/2,
I0 = (a2 + b2)1/2,
α=arccot(( D - d) / 2)/I。
如果这段距离太短,卷取电动机在该距离之内无法实现停止,那么就必须在此之前先缠绕一圈或几圈。
下面计算卷取机缠绕的圈数。
带钢停止需要的距离:
l1 =(1/2 a′)*V2
式中, a′———带尾定位开始时的加速度;
V —带尾定位开始时的速度。
卷取一圈的长度l0 =π*D,卷取的圈数N = int(l1 –l)/l0,最后得定位长度设定值为L = l + N·l0
图5 带尾定位长度计算
D —卷取机直径; d —剪后转向辊直径; a —两圆圆心间水平方向间距; b —两圆圆心间垂直方向间距; α0 —两圆心连线与水平线的夹角;β—期望的定位点偏离垂直中心线的角度。