伺服系统惯量识别及谐振抑制方法研究
- 格式:pdf
- 大小:7.50 MB
- 文档页数:69
面向机器人笛卡尔空间的轨迹运动自适应抑振控制作者:李琳古智超张铁来源:《振动工程学报》2021年第03期摘要:工業机器人的柔性传动部件导致机器人末端产生振动,严重降低笛卡尔运动精度,为此提出自适应输入整形抑振控制策略。
以“双惯量模型+PD控制”建立关节伺服系统模型,分析振动特性。
由于运动中的振动信号存在较大噪声,无法准确辨识振动频率和阻尼比,故采用基于递推最小二乘法(Recursive Least Squares, RLS)的任意时延输入整形器自适应设计方法。
通过对笛卡尔轨迹规划的归一化插补函数输入整形,提出笛卡尔轨迹输入整形方法,实际表现为重新规划笛卡尔速度大小而不改变运动方向。
输入整形抑振实验中直线轨迹振动信号能量最大降低77.08%,圆弧轨迹振动信号能量最大降低31.07%,残余振动信号能量降低80%以上,验证了所述抑振控制策略能有效抑制机器人笛卡尔运动启停时的振动。
关键词:工业机器人; 振动抑制; 柔性关节; 自适应输入整形; 笛卡尔运动中图分类号: TP242.2; TB535 文献标志码: A 文章编号: 1004-4523(2021)03-0499-08DOI:10.16385/ki.issn.1004-4523.2021.03.007引言工业机器人的柔性传动部件(如谐波减速器、同步带等)启动和停止时导致机器人末端存在较大的振动,严重降低了运动精度[1]。
在工业生产中,要求工业机器人具备高速、高精度的运动控制特点,故需要研究抑制末端振动的控制策略。
柔性关节通常采用双惯量模型描述,振动现象属于伺服系统的机械谐振[2]。
常用的伺服振动控制方法包括陷波滤波器[3⁃4]、状态反馈法[5⁃6]、迭代学习控制[7] 、输入整形器[8⁃9]等。
输入整形器利用特定的脉冲序列与参考输入进行卷积运算得到抑振控制输入。
与陷波滤波器和低通滤波器相比,输入整形器的抑振效果更优且具有更短的滤波时间长度[10]。
伺服系统中的振动控制技术伺服系统的振动问题严重影响系统的精度和可靠性。
因此,振动控制技术在伺服系统的设计和应用中日益受到关注。
本文将介绍伺服系统中的振动问题和振动控制技术。
一、伺服系统的振动问题伺服系统的振动问题是由于机械结构和电气控制系统的复杂性导致的。
机械结构的振动问题主要包括机械刚度、不平衡质量、摩擦和运动惯量等因素引起的振动。
而电气控制系统的振动问题主要与转矩控制、电流控制和速度控制等因素有关。
在伺服系统中,振动问题的表现主要包括质量、速度和位置误差的波动,并会导致机械声响、能耗增加和寿命缩短等负面影响。
因此,必须采取振动控制技术来解决这些问题。
二、1. 模型预测控制模型预测控制是一种基于预测模型的控制方法,它通过预测未来状态来确定控制策略,以实现对系统的控制。
在伺服系统中,模型预测控制方法可以减少振动和噪声,提高系统响应速度和精度。
2. 自适应滤波自适应滤波是一种基于信号处理的振动控制方法,它可以通过对振动信号的滤波处理来减少振动干扰。
在伺服系统中,自适应滤波方法可以有效减少系统中的振动,提高系统的控制精度。
3. 模态分解模态分解是一种将振动信号分解为几个互相独立的模态信号的方法,以便更好地理解和控制振动。
在伺服系统中,模态分解可以降低系统振动、提高控制精度和可靠性。
4. 非线性控制非线性控制是一种基于非线性系统动力学过程的控制方法,它可以实现对伺服系统振动和误差的有效控制。
在伺服系统中,非线性控制方法可以提高系统的响应速度和精度,减少振动和噪声。
5. 智能控制智能控制是一种基于人工智能算法的控制方法,它可以通过学习系统动力学和环境信息来实现自适应控制。
在伺服系统中,智能控制方法可以提高系统的控制精度和可靠性。
三、总结伺服系统中的振动问题是一个复杂的问题,需要综合应用机械结构、电气控制和信号处理等多种技术来解决。
各种控制方法在不同的应用场景和控制对象都有各自的优点和局限性,需要充分考虑实际情况选择合适的方法。
模型不确定二质量系统的振动抑制与实验研究徐宝申;周波【摘要】针对电机柔性连接负载驱动系统在加减速时会产生不稳定的扭转振动,以及刚度系数测量复杂且难以准确计算的问题,提出了通过对开环系统电机端速度响应进行时频分析,识别系统谐振频率以及调整时间的方法,进而设计了一种IP反馈控制与输入整形前馈相结合的振动抑制控制器,在提高系统响应速度的同时,达到较好的振动抑制效果.在模型不确定二质量扭转谐振平台上进行实验研究,实验结果表明该方法能够有效抑制负载端振动,并显著提高系统响应速度.【期刊名称】《实验技术与管理》【年(卷),期】2019(036)003【总页数】4页(P175-178)【关键词】振动抑制;二质量扭转系统;模型不确定;时频分析;IP控制器【作者】徐宝申;周波【作者单位】北京城市学院资源设备管理办公室 ,北京 101309;北京城市学院信息学部 ,北京 101309【正文语种】中文【中图分类】TP273工业生产设备中普遍存在柔性连接负载,使伺服系统在加减速过程中产生振动,不但严重影响设备安全运行,而且迫使伺服系统降低响应速度,以致影响伺服系统的控制品质。
电机驱动系统通常可视为二质量柔性扭转系统,研究此类柔性负载的振动抑制问题对提高伺服系统性能具有重要意义[1]。
针对二质量系统振动抑制的研究成果包括基于多项式惯量比的低阶IP控制器设计[2]、基于极点配置的PI/PID控制器设计[3-4]、模糊控制及神经网络控制[5-6]等。
其中采用低阶IP控制的方法结构简单、参数设计方便,在工业中得以广泛采用。
此外,为进一步提高系统响应速度,研究人员引入输入整形前馈以实现机构残余振动的快速抑制[7]。
然而,不论是输入整形器还是低阶IP控制器,均依赖系统的模型参数。
但在实际工程应用中,难以对柔性轴的刚度系数和系统谐振频率精确建模。
此外,生产现场伺服系统只有电机端速度可测,而由于传动间隙及减速比等原因,电机端速度振动微小,传统分析手段很难识别出系统的特征参数。
No.4Apr.2021第4期2021年4月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing Techninue文章编号:1001 -2265(2021)04 -0096 -04DOI : 10.13462/j. cnki. mmtamt. 2021.04. 023伺服系统转动惯量辨识及控制器PI 参数优化孙彦瑞,苏成志(长春理工大学机电工程学院,长春130000)摘要:在机器人运行时,为了使伺服电机在最优性能下达到目标速度、在工作过程中有着更强的抗 扰动能力,并避免出现震荡、谐振的状况,从而造成机器人运行时动态稳定性严重降低。
提出一种 基于非线性动态学习因子的粒子群优化算法,对普通粒子群优化算法进行改进。
该算法以伺服系 统控制模型中的速度控制器为核心,实时辨识负载转动惯量值,使伺服系统内部控制参数根据实际 工况调节;运用该辨识值,通过计算得到速度控制PI 参数值,并实时修正速度控制器PI 参数值。
MATLAB/SIMULINK 仿真结果表明,与传统的粒子群优化算法相比,无论在电机启动过程中、还是 负载扰动下,该方法都具有更快的响应速度、更高的控制精度以及更强的抗干扰能力。
关键词:转动惯量;非线性动态学习因子;粒子群优化算法;速度控制器PI 参数中图分类号:TH166 ;TG506 文献标识码:AServo System Inertia IdenhPcahon and Controller PI Parameter OptimizationSUN Yan-rui , SU Cheng-zhi(School of Mechanical and Electrical Engineering , Changchun Univvrsity of Science and Technolo/y , Changchun 130000, Ch/ia )Abstrach : During the operation of the robot , in order to make the servo motor achieve the target speed un der the optimal performance , and have stronger anti-disirbance ability in the working proces s , and to a void the prob —m of vibration and resonance , resulting in a serous reduction in the dynamic stability of the robot. The coniol model of servo motor is analyzed , and a particle swarm optimization algorithm based on nonlmear dynamic learning factor is proposed. The algorithm ties the speed conioller in the servo system coniol model as the core , and can identify the loadz moment of inertia in real time , so that the internaicontrol parameters of the s ervo system can be adjusted according to the acial condbions. By using the i dentification value , the PI parameter value of the speed control is obtained through calculation , and the PI parameter value of the speed conioller is corrected in real time. The results of MATLAB/SIMULINK sim ulation show that compared with the traditional pakWle swarm optimization algorithm , this method has fas ter response speed , higher control accuracy and stronger anti-interference ability , whether in the motorsha+hing p+oce s o+unde+hheload dishu+bance.Key wois : moment of inertia ; nonlinear dynamic learning factor ; particle swarm optimization tgoriim ; speed conho l e+PIpa+amehe+0引言机器人在运行时,每个轴的负载转动惯量与负载 扭矩随着机器人的姿态的变化而变化;伺服系统对负 载转动惯量的辨识精度、辨识快慢,决定着伺服系统运 行的稳定性、精确性与快速性。
柔体动力学模型的机器人关节振动分析与抑制张铁;覃彬彬;刘晓刚【摘要】To solve the problems of mechanical resonance caused by flexible transmission in industrial robot system,a vibration suppression method of robot joints based on flexible dynamics model is studied to reduce the vibration of arm in motion.Firstly,the flexible dynamics model of robot joints is established to analyze the causes of vibration by mathematical expressions,for obtaining the modal information of joints by using ABAQUS(a software).Thus,the measurement point arrangement of the force hammer excitation experiment can be achieved based on the characteristics of the modal information.In order to suppress the vibration of robot joint,the modal information of the joint shaft is obtained by experiment,and then the notch filter is designed by analyzing the influence of resonance frequency on the robot control.The simulation and control experiment of the robot are carried out in the 5th joint.The experimental results on the value of the end residual amplitude indicate that the acceleration of amplitude decreases from 3to 0.5m/ s2,the absolute value of the motor rotor offset decreases from 1to 0.5°,embodying the good suppression characteristics of the notch filter.%为解决工业机器人传动系统中的柔性传动环节常常导致的机械谐振问题,减小手臂在运动中出现振动,研究了基于柔体动力学模型的机器人关节振动抑制的方法.该方法先通过对机器人关节建立柔体动力学模型,从数学表达式中分析其产生振动的原因,利用ABAQUS有限元软件获得关节的振型信息,并基于ABAQUS的振型特点获得力锤激励实验法的测点布置,通过实验获得关节轴的模态信息,并进一步分析共振频率对机器人的控制影响以设计合适的陷波滤波器,从而实现对机器人关节振动的抑制.该方法在机器人第5关节中进行了仿真和控制实验,末端余振幅值的实验说明振幅加速度值从3降至0.5m/s2,停止后电机转子偏移量绝对值从1降至0.5°,体现了陷波滤波器良好的抑制特性.【期刊名称】《振动、测试与诊断》【年(卷),期】2019(039)002【总页数】8页(P242-248,438)【关键词】柔体动力学;有限元;力锤激励法;陷波滤波器;振动抑制【作者】张铁;覃彬彬;刘晓刚【作者单位】华南理工大学机械与汽车工程学院, 广州, 510641;华南理工大学机械与汽车工程学院, 广州, 510641;桂林航天工业学院广西高校机器人与焊接重点实验室, 桂林, 541004【正文语种】中文【中图分类】TP242.2;TH113.1引言垂直六自由度工业机器人的关节采用RV减速器及具有柔性较大的同步传动带系统驱动关节运动时,关节和连杆的柔性效应的增加,使得结构发生变形与共振,导致任务的期望精度降低。
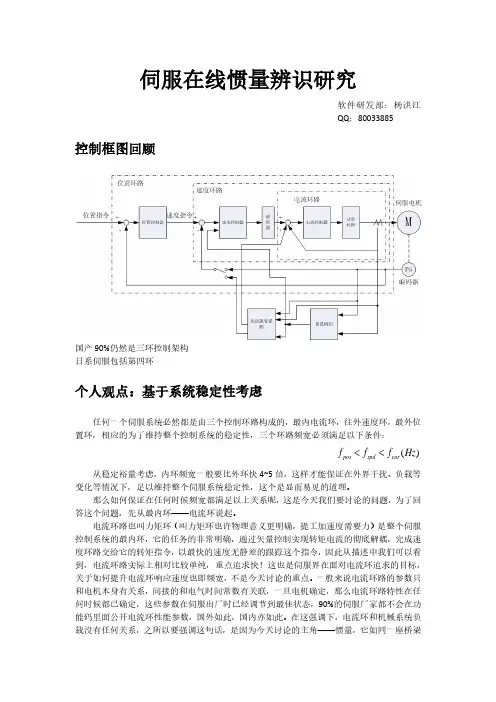
刚性、惯量、响应时间及伺服增益调整之间的关系刚性:坚硬不易变化。
对于一个结构固定的物体,刚性是其固有的特质。
惯量:物体运动的惯性量值,也是物体的固有特性。
响应时间:可以理解为从指令发出到动作完成之间的时间。
来举个例子。
刚性:钢管比较坚硬,受力不易改变,或者说形变小;橡皮筋比较软,受到同等力产生的形变比较大,我们就说钢管的刚性强,橡皮筋的刚性弱,或者说其柔性强。
在我们伺服的应用中,用联轴器来连接电机和负载,就是典型的刚性连接;而用同步带或者皮带来连接电机和负载,就是典型的柔性连接。
惯量:惯量描述的是物体运动的惯性。
以转动惯量为例,转动惯量是物体绕轴转动惯性的度量。
其计算公式为:J=∑mi*ri^2,式中mi表示刚体的某个质点的质量,ri表示该质点到转轴的垂直距离。
从式中可以看出,转动惯量只跟转动半径和物体质量(通常所说的重量)有关。
转动惯量和力矩的关系如下M=Jβ 其中M是扭转力矩J是转动惯量β是角加速度也就是说,角加速度越大,所需要的力就越大,在平稳运行当中,即角加速度为零的时候,为克服转动惯量而输出的力就为零。
生活中我们也有这种体验,在骑自行车的时候,在加速的过程中,我们需要出比较大的力,而当速度已经平稳了以后,则出力比较小。
同样,转动惯量越大,所需要的力也越大。
就比如,如果要将一个静止状态的铁环推动起来(角加速度不为零),不需要多大的力,但要将一个静止的汽车轮胎推动起来,就需要很大的力。
反过来讲,当输出的力矩为固定值时,转动惯量越大,角加速度就越小。
响应时间:这里的响应时间不需要以自控原理内讲的响应时间来标定,只作为一个定性的分析。
可以分解为电气系统的响应时间和机械系统的响应时间。
电气系统的响应时间,给定一个位置、速度、转矩指令,到电机运行至该位置、速度、转矩的时间。
以位置模式为例,从发完指令到电机到达指令位置并停止所需要的时间,就是位置的响应时间,也可称为定位结束时间。
同样的,若不给位置指令,电机就应该停在原位置上,但实际上电机并不是绝对禁止的,而是在该位置上实现一个动平衡。
负载加速度反馈的伺服系统谐振抑制
负载加速度反馈的伺服系统谐振抑制
谐振常常造成伺服系统不稳定,影响其控制性能.首先建立光电控制系统的动力学方程,分析了谐振和反谐振产生的原因.伺服系统同样也受到反谐振的影响,并且反谐振出现在谐振之前.由于间隙和摩擦的影响,谐振往往会随之变化,很难用固定的陷波器去补偿.提出一种负载加速度反馈控制算法减小谐振的影响,由此形成三闭环控制模式.根据提出的加速度反馈算法3条准则设计加速度控制器,采用此控制方法速度闭环带宽提高了5Hz左右,谐振峰减小了15dB.并且200Hz以后的谐振迅速衰减,提高了系统的稳定性.
作者:唐涛黄永梅张桐付承毓 TANG Tao HUANG Yong-mei ZHANG Tong FU Cheng-yu 作者单位:唐涛,TANG Tao(中国科学院光电技术研究所,四川,成都,610209;中国科学院研究生院,北京,100039) 黄永梅,张桐,付承毓,HUANG Yong-mei,ZHANG T ong,FU Cheng-yu(中国科学院光电技术研究所,四川,成都,610209) 刊名:光电工程ISTIC PKU英文刊名:OPTO-ELECTRONIC ENGINEERING 年,卷(期):2007 34(7) 分类号:V556 关键词:加速度反馈电流环带宽机械谐振跟踪控制系统。