浙大自控原理习题课
- 格式:ppt
- 大小:8.72 MB
- 文档页数:21

第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+ (4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
第一章 直流伺服电动机1-1直流伺服电动机的电磁转矩和控制电流由什么决定?答:a :由T em =C m ΦI a 知电磁转矩由每极磁通量和绕组电流大小决定。
b :由T em =T 0 +T 2 =CmΦIa 控制电流由负载转矩(T 2)和空载转矩(T 0)大小决定。
1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化?为什么?答:a :电磁转矩T em =T 0 +T 2可见电磁转矩也不变。
由T em =C m ΦI a 知控制电流I a 也不变b :KeKtRaTemKe Ua n -=知T em 不变可见U a 转速升高理想空载转速变大导致转速n 升高。
1-3已知一台直流电动机,其电枢额定电压Ua=110V ,额定运行时电枢电流Ia=0.4A ,转速n=3600rpm ,它的电枢电阻Ra=50欧姆,负载阻转矩To=15mN.m 。
试问该电动机额定负载转矩是多少? 答:Ea= Ua- IaRa=110-0.4×50=90V Ea=Ce Φn, Ce=0.105Cm Cm Φ=0.23836000.10590n 105.0=⨯=⨯EaT em =T 0 +T 2=CmΦIa→T 2=CmΦIa -T 0 =0.40.238=0.0952-15×10-3=80.2mN.m1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化?并说明由原来的状态到新的稳态的物理过程。
答:磁转矩T em =T 0 +T 2可见T 2 ↓电磁转矩也↓。
由T em =C m ΦI a 知控制电流I a ↓ Ea= Ua- IaRa 可见I a ↓知Ea↑,由Ea=Ce Φn 知Ea↑知n ↑ 第二章 直流测速发电机2-4某直流测速发电机,其电枢电压U=50V ,负载电阻R L =3000Ω,电枢电阻Ra=180Ω,转速n=3000rpm ,求该转速下的空载输出电压Uo 和输出电流Ia 。
浙江大学远程教育学院 《自动控制元件》课程作业姓名: 学 号: 年级:学习中心:第一章 直流伺服电动机1-1直流伺服电动机的电磁转矩和控制电流由什么决定?答:1. 由T em =C m ΦI a 可知电磁转矩由每极磁通量和绕组电流大小决定。
2. 由T em =T 0 +T 2 =CmΦIa 控制电流由负载转矩(T 2)和空载转矩(T 0)决定。
1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化?为什么?答:1. 电磁转矩T em =T 0 +T 2可见电磁转矩不变; 由T em =C m ΦI a 知控制电流I a也不变; 2. KeKtRaTemKe Ua n -=可见U a 升高使得理想空载转速变大导致转速n 升高。
1-3已知一台直流电动机,其电枢额定电压Ua=110V ,额定运行时电枢电流Ia=0.4A ,转速n=3600rpm ,它的电枢电阻Ra=50欧姆,负载阻转矩To=15mN.m 。
试问该电动机额定负载转矩是多少? 答:Ea= Ua- IaRa=110-0.4×50=90VEa=Ce Φn, Ce=0.105Cm 所以Cm Φ=90/0.105/3600= 0.238; T em =T 0 +T 2=CmΦIa ,所以T 2=CmΦIa -T 0 =0.4*0.238 – 15*10-3=0.0952-15×10-3=80.2mN.m1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化?并说明由原来的状态到新的稳态的物理过程。
答:电磁转矩T em =T 0 +T 2可见T 2 ↓电磁转矩也↓; 由T em =C m ΦI a 知控制电流I a ↓; Ea= Ua- IaRa 可见I a ↓知Ea↑,由Ea=Ce Φn 知Ea↑知n ↑;当电磁转矩降低到和新的负载转矩相等后, 系统即进入新的平衡状态.第二章 直流测速发电机2-4某直流测速发电机,其电枢电压U=50V ,负载电阻R L =3000Ω,电枢电阻Ra=180Ω,转速n=3000rpm ,求该转速下的空载输出电压Uo 和输出电流Ia 。
![第二章-5-系统传递函数的计算[1]自动控制原理 浙江大学考研资料](https://uimg.taocdn.com/caefca7f31b765ce04081401.webp)

中文版教材习题一参考答案1-1 精确的光信号源可以将功率输出精度控制在1%以内。
激光器由输入电流控制并产生输出功率,作用在激光器上的输入电流由一个微处理器控制,微处理器将期望的功率值与传感器测得的激光器的输出功率值作比较。
这个闭环控制系统的框图如图1-12所示。
试指明该系统的输出变量、输入变量、被测变量和控制变量。
1-1 参考答案 输出变量、输入变量、被测变量和控制变量分别是:输出功率、期望功率、输出功率和电流。
1-2 画出由驾驶员驾驶汽车时的汽车速度控制系统的框图。
如果采用目前很多车辆上已经安装了的速度保持控制系统(只要按下按钮,它就会自动地保持一个设定的速度。
由此,司机驾车就可以限定的速度或较为经济的速度行驶,而不需要经常查看速度表,也不需要长时间控制油门)。
试画出汽车速度保持控制系统的反馈控制系统框图。
1-2 参考答案 (1)由驾驶员驾驶汽车时的汽车速度控制系统的框图如图所示。
(2)汽车速度保持控制系统的反馈控制系统框图如下图示。
+ 电流i (t ) 输出功率 期望功率图1-12 信号光源的部分框图 微处理器 激光器传感器 偏差 输出功率检测值传感器过程 执行机构 习题一1-2(2)汽车速度控制系统组成方块驾驶机构控制器测速仪偏差+ 汽车实际速度测得的汽车速度习题一1-2(1)汽车驾驶员速度控制系统组成方块图驾驶机构驾驶员驾驶员的视觉+速度表偏差 汽车实际行车速度1-5 图1-13是水槽液位系统的两种不同控制方案(1)分别画出两个控制系统的方块图;(2)分别指出两个控制系统的被控对象、被控变量和操纵(或称控制)变量;(3)结合这两个系统的方块图,说明方块图中的信号流与工艺流程中的物料流。
1-5LTLCh1Q0Q in图1-13水槽的液位控制h1Q0Q inLCLT实际液位给定液位h1习题一1-5(1)方案一图液位自动控制系统原理方框图液位控制器LC 水槽调节阀液位测量LT实际液位h出口流量Q0入口流量Q in(作为干扰量)实际液位h给定液位h1习题一1-5(1)方案二图液位自动控制系统原理方框图液位控制器LC 水槽调节阀液位测量LT实际液位h入口流量Q in出口流量Q0(作为干扰量)(2)两个方案的被控对象均为水槽,被控变量均为液位。
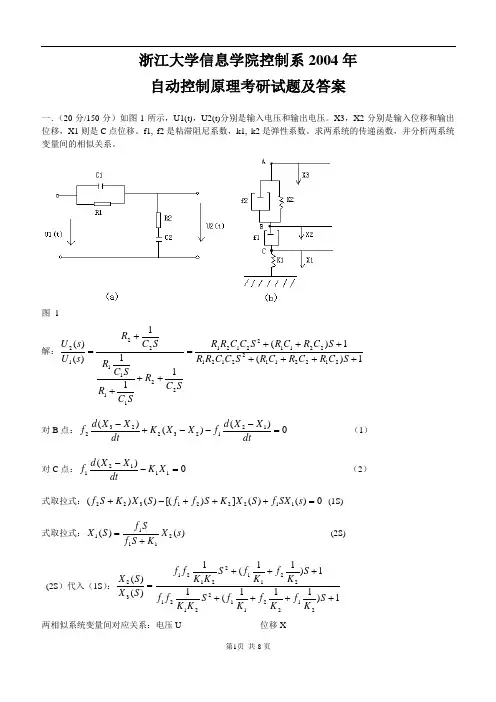
浙江大学2010年《自动控制原理》考研试题与答案1.(10分)系统的微分方程模型如下:1()[()()]e t k r t y t =-,21()()()()x t Td e t Td e t e t =++,2()[()()]y t k n t x t =+式中,r 、n 、y 分别是输入、干扰和输出,12k k 、、12Td Td 、为常数,试建立系统方框结构图。
解:对系统的微分方程做拉氏变换,得:1()[()()]e s k r s y s =-,2221()()()()s x s Td s e s Td se s e s =++,2()[()()]sy s k n s x s =+ 由此可得系统方框结构图如图所示。
2.(15分)系统结构如图所示,试用方框图等效变换法求传递函数()()()Y s G s R s =。
解:先对中间的复杂结构进行等效变换,如图所示。
然后再进一步等效,如图所示。
比较点可以交换,如图所示。
所以:62435142521162435134425211()11()()()()1()11G G G G G G G H G H G H Y s G s G G G G G G R s H H G H G H G H +⋅+++==+--⋅⋅+++16243516243543114252()()()(1)(1)G G G G G G G G G G G G H H G H G H G H +=+-++++3.(10分)已知二阶系统的单位阶跃响应为 1.2()1012.5e sin(1.653.1)t y t t -=-+,试求系统的超调量%σ、峰值时间p t 和调节时间s t 。
提示: 1.2 1.2 1.215e sin(1.653.1)20e cos(1.653.1)25e sin1.6t t t t t t ---+-+=解: 1.2 1.2 1.2()15e sin(1.653.1)20e cos(1.653.1)25e sin1.6t t t y t t t t ---'=+-+=令()0y t '=,即p sin1.60t =,可得:p p π1.6πs 1.6t t =⇒=p1.2p ()()12.5e sin 53.1%100%9.5%()10t y t y y σ--∞=⨯==∞因为n 1.2ζω=,则当2%∆=时,有:s n43.3s t ζω== 4.(15分)单位负反馈系统的开环传递函数为2(1)()(1)K s G s s Ts τ+=+,0K >,0τ>,0T >,输入2()r t t =。
习题课说明12月14、16、21日的三次习题课,分三次练习《自控原理》前五章的经典试题,14日(1~2章),16日(2~3章),21日(5章)。
请大家事先做好试题,上课时会讲解部分经典试题并答疑。
第一章绪论1. 本章基本要求●掌握有关自动控制的基本概念,明确控制系统任务、组成及控制装置各部分的作用。
●了解系统的基本控制方式及特点,正确理解负反馈控制原理。
●正确理解对控制系统稳定性、准确性和快速性的要求。
●通过练习,掌握有系统工作原理图画出系统方框图的方法。
●掌握线性定常系统微分方程的特点,能够判断线性、非线性、定常、时变系统。
2. 典型例题1)根据图题1.1所示的电动机速度控制系统工作原理图(1)将a,b 与c,d 用线连接成负反馈系统;(2)画出系统方框图。
图 1.12)图题1.2所示为液位自动控制系统原理示意图。
在任何情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图 1.23)下列各式是描述系统的微分方程,其中,r(t)为输入变量,c (t)为输出量,判断哪些是线性定常或时变系统,哪些是非线性系统? (1) 3232()()()748()()d c t d c t dc t c t r t dt dt dt+++= (2) 2()8()()c t r t r t =++ (3) ()()8()()3dc t dr t t c t r t dt dt⋅+=+ (4) ()()sin 3c t r t t ω=+第二章 线性系统的数学描述1. 本章基本要求●熟悉建立系统(或元部件)微分方程的步骤和方法 ●牢固掌握传递函数的定义和性质,掌握典型环节及其传递函数 ●掌握系统结构图的建立、等效变换及其系统开环、闭环传递函数的求取 ●掌握从其他不同形式模型求取系统传递函数的方法2. 典型例题1)列写图2.1 RLC 网络的运动方程和传递函数,图中电压1()u t 和2()u t 分别为输入输出量图2.12)列写图2.2 RLC 网络的微分方程,图中电压()r u t 和()c u t 分别为输入输出量图 2.23)列写图2.3 RLC 网络的微分方程与传递函数,图中电压()r u t 和()c u t 分别为输入输出量图 2.34)试化简如图2.4所示系统结构图,并求系统传递函数()/()C s R s 。
自动控制原理Principle of Automatic Control
浙江大学控制科学与工程学系
第三章CHAPTER 3
连续时间控制系统的时域分析
当λ=σ+j ωd 时,系统暂态响应函数为A e σt sin(ωd t +φ)。
对于阻尼正弦情况,时间常数通过表征包络线A e σt 的参数σ来定义。
时间常数T 等于
n
T ζωσ
1
1
=
=
t
Ae
σ-t
Ae
σ(欠阻尼)
(过阻尼)
)
sin(φωσ+t Ae
d t
,12
1k k d
n n j j λσωζωωζ+=±=-±-σ
t o
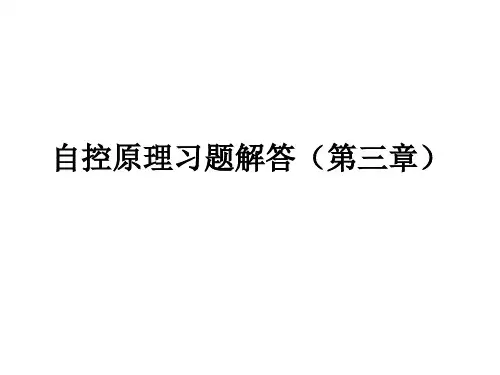
最大偏离量:M p 峰值时间:T p
上升时间:T r ,t o 调节时间:T s
•衰减振荡过渡过程:应用0-100% 上升时间t o •非振荡过渡过程:应用10-90% 上升时间T r
最大偏离量
控制系统阶跃响应
上升时间
峰值时间
调节时间
稳态误差
假定系统在单位阶跃输入作用前都处于静止状态,而且系统输出量及其各阶导数都等于零(即零初始条件)
第2峰B ′
ω(y
R(s)Y(s)
选择增益K和参数p,使得百分比超调量。
第一章 习题答案1-11-21-3 闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4 答:(图略)题1-5 答:该系统是随动系统。
(图略) 题1-6 答:(图略)第二章习题答案题2-1 解:(1)F(s)=12s 1+-Ts T(2)F(s)=0.5)421(2+-s s(3)F(s)=428+⋅s es sπ (4)F(s)=25)1(12+++s s(5)F(s)=32412ss s ++ 题2-2 解:(1) f(t)=1+cost+5sint(2) f(t)=e -4t(cost-4sint) (3) f(t)=t t t te e e 101091811811----- (4) f(t)= -t t tte e e ----+-3118195214 (5) f(t)= -t te e t 4181312123--+++ 题2-3 解:a)dtduu C R dt du R R c c r 22111=++)( b)r c c u CR dt du R R u C R dt du R R 1r 12112111+=++)( c) r r r c c c u dtdu C R C R dtu d C C R R u dtdu C R C R C R dtu d C C R R +++=++++)()(1211222121122111222121 题2-4 解:a) G(s)=1)(212++s T T sT (T 1=R 1C, T 2=R 2C )b) G(s)=1)(1212+++s T T s T (T 1=R 1C, T 2=R 2C )c) G(s)= 1)(1)(32122131221+++++++s T T T s T T s T T s T T (T 1=R 1C 1, T 2=R 1C 2, T 3=R 2C 1, T 4=R 2C 2 ) 题2-5 解:(图略) 题2-6 解:33)(+=Φs s 题2-7 解:a) ksf ms s +-=Φ21)(b) )()()(1))(1)(()(21221s G s G s G s G s G s +++=Φc) )()(1)())()(()(31321s G s G s G s G s G s ++=Φd) )()()()(1))()()(323121s G s G s G s G s G s G s -+-=Φe) G(s)=[G 1(s)- G 2(s)]G 3(s)f) )()()()()()()()()()(1)()()()()(43213243214321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +-++=Φg) )()()()()()()()(1)()()()(43213212321s G s G s G s G s G s G s G s G s G s G s G s -+-=Φ题2-8 解:102310)1()()(k k s s T Ts k k s R s C ⋅++++⋅=1023101)1()()(k k s s T Ts k k s N s C ⋅++++⋅=1023102)1()()(k k s s T Ts s T k k s N s C ⋅++++⋅⋅⋅= 题2-9 解:)()()()(1)()()(4321111s G s G s G s G s G s R s C +=)()()()(1)()()(4321222s G s G s G s G s G s R s C +=)()()()(1)()()()()(432142121s G s G s G s G s G s G s G s R s C +=)()()()(1)()()(4321412s G s G s G s G s G s R s C +=题2-10 解:(1)3212321)()(k k k s k k k s R s C +=3212032143)()()(k k k s s G k k k s k k s N s C +⋅+=(2) 2140)(k k sk s G ⋅-= 题2-11 解:122212211111)()1()()(z z s T s T T C s T T s T k k s s m m d e L ⋅++⋅+++⋅=ΘΘ (T 1=R 1C, T 2=R 2C, T d =L a /R a , T m =GD 2R a /375C e C m )第三章 习题答案3-1. s T 15=(取5%误差带) 3-2. 1.0=H K K=2 3-3.当系统参数为:2.0=ξ,15-=s n ω时,指标计算为:%7.52%222.0114.32.01===-⨯---e eξξπσs t ns 352.033=⨯==ξωs t n p 641.02.01514.3122=-⨯=-=ξωπ当系统参数为:0.1=ξ,15-=s n ω时,系统为临界阻尼状态,系统无超调,此时有:st ns 95.057.10.145.67.145.6=-⨯=-=ωξ3-4.当110-=s K 时,代入上式得:110-=s n ω,5.0=ξ,此时的性能指标为:%3.16%225.0114.35.01===-⨯---e eξξπσs t ns 6.0105.033=⨯==ξωs t n p 36.05.011014.3122=-⨯=-=ξωπ当120-=s K 时,代入上式得:11.14-=s n ω,35.0=ξ,此时的性能指标为:%5.30%2235.0114.335.01===-⨯---e eξξπσs t ns 6.01.1435.033=⨯==ξω由本题计算的结果可知:当系统的开环放大倍数增大时,其阻尼比减小,系统相对稳定性变差,系统峰值时间变短,超调量增大,响应变快,但由于振荡加剧,调节时间不一定短,本题中的调节时间一样大。