现代控制理论(浙大)第一章(A)
- 格式:ppt
- 大小:1.95 MB
- 文档页数:66

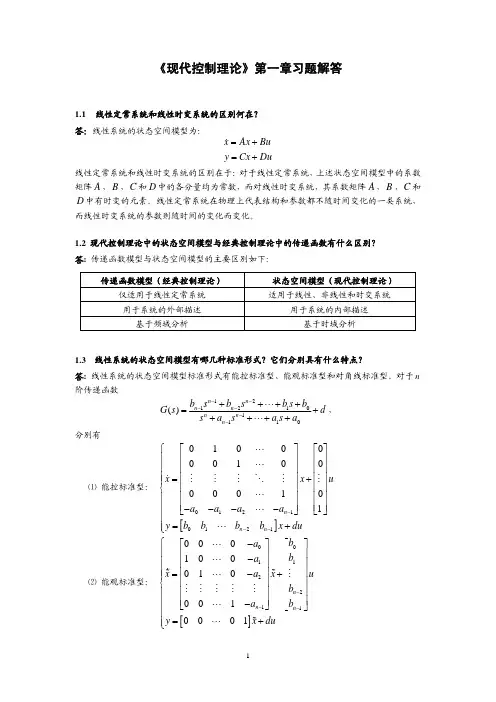
《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
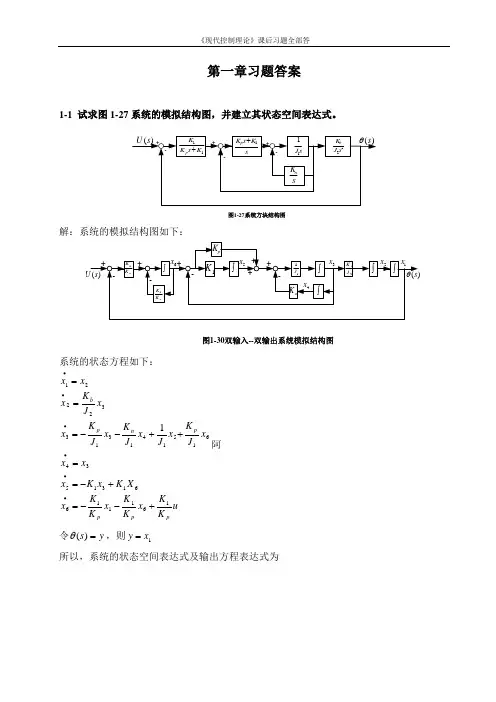
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。

第1章绪论1.1 控制系统的构成控制系统的组成和运行的普遍机制是控制论的反馈控制原理。
从信息处理和控制的角度看,控制系统可以看成由施控系统和被控系统两部分组成,并运行于一定的扰动和环境中,如图1–1所示。
施控系统产生控制作用,控制被控系统的物质流、能量流、信息流和资金流在规定的条件下以期望的或最优的方式运行。
扰动图1–1 控制系统的组成施控系统和被控系统的划分应根据实际应用情况定,由所考察的重点确定。
被控系统包括单台机械或设备、生产线、生产过程、以及整个工厂和企业等,它们是接受物质流、能量流、信息流和资金流的对象,也称控制对象。
施控系统应包括传感、控制和执行三部分。
传感是获得被控系统的状态、输出和环境等方面信息的各种手段之总和,包括测量物理变量的传感器,为获得某些不能用测量仪表测量的变量的软测量技术,以及多传感器信息融合技术等。
执行是产生施控系统最终输出信息的各种手段之总和,它可能是驱动部件(如调节阀、电动机、继电器等)、信息转换和通信部件(如与下级计算机的接口)、显示、记录以及图、文、声、多媒体输出部件等。
控制则以计算机为主体,完成控制问题的求解,形成控制算法和控制策略,产生控制规律,它是控制系统的核心。
抽象化后的控制系统结构如图1–2所示。
图1–2 控制系统结构当着重研究控制策略而不关心信息的获取以及控制输出的实现时,将传感简化为求差器,将控制、执行合称控制器,如图1–3所示。
控制策略(狭义也称控制算法)是控制器的核心,是控制理论研究的重点。
图1–3 简化的控制系统1.2 控制理论发展简况在工业应用和理论研究中,控制理论的发展过程大体上可分为三个阶段:经典控制理论、现代控制理论及智能控制理论。
这种阶段性的发展过程是由简单到复杂、由量变到质变的辩证发展过程,是现代科学技术迅速发展对自动控制的程度、精度、范围及其适应能力的需求越来越高,从而推动控制理论发展的结果。
理论来源于实践,反过来指导实践,控制理论的发展过程证明了这个真理。
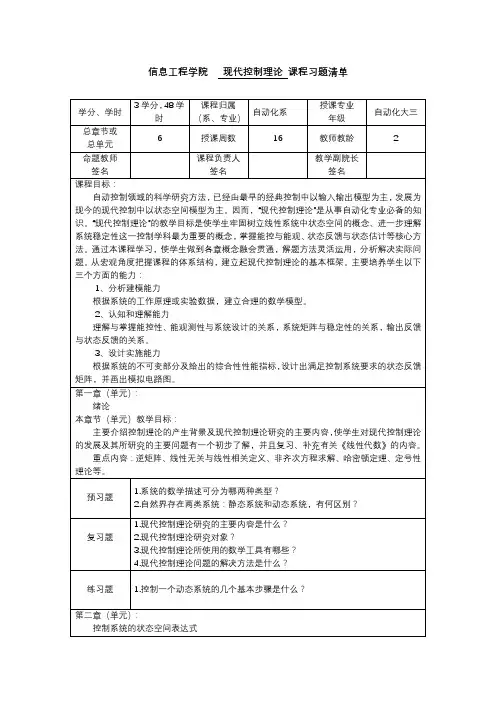
信息工程学院现代控制理论课程习题清单正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线性变换,线性定常系统状态方程的求解方法。
重点内容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本性质,传递函数矩阵的定义。
要求熟练掌握通过传递函数、微分方程和结构图建立电路、机电系统的状态空间表达式,并画出状态变量图,以及能控、能观、对角和约当标准型。
难点:状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。
预习题1.现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别2.状态、状态空间的概念3.状态方程规范形式有何特点4.状态变量和状态矢量的定义5.怎样建立状态空间模型6.怎样从状态空间表达式求传递函数复习题1.怎样写出SISO系统状态空间表达式对应的传递函数阵表达式2.若已知系统的模拟结构图,如何建立其状态空间表达式3.求下列矩阵的特征矢量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=2510221-1A4.(判断)状态变量的选取具有非惟一性。
5.(判断)系统状态变量的个数不是惟一的,可任意选取。
6.(判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输出关系的系统,表达为状态空间描述。
7.(判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定常系统中应用,也可以在时变系统中应用.8.如果矩阵 A 有重特征值,并且独立特征向量的个数小于n ,则只能化为模态阵。
9.动态系统的状态是一个可以确定该系统______(结构,行为)的信息集合。
这些信息对于确定系统______(过去,未来)的行为是充分且必要的。
10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时,则称这样的系统为______(线性定常,线性时变)系统。
如果这些元素中有些是时间t 的函数,则称系统为______(线性定常,线性时变)系统。
11.线性变换不改变系统的______特征值,状态变量)。
第一章线性离散系统第一节概述随着微电子技术,计算机技术和网络技术的发展,采样系统和数字控制系统得到广泛的应用。
通常把采样系统,数字控制系统统称为离散系统。
一、举例自动测温,控温系统图;加热气体图解:1. 当炉温h变化时,测温电阻R变化→R∆,电桥失去平衡状态,检流计指针发生偏转,其偏转角度为)e;(t2. 检流计是个高灵敏度的元件,为防磨损不允许有摩擦力。
当凸轮转动使指针),接触时间为τ秒;与电位器相接触(凸轮每转的时间为T3. 当炉温h 连续变化时,电位器的输出是一串宽度为τ的脉冲信号e *τ(t);4.e *τ(t)为常值。
加热气体控制阀门角度调速器电动机放大器h →→→→→→ϕ 二、相关定义说明(通过上例来说明) 1. 信号采样偏差)(t e 是连续信号,电位器的输出的e *τ(t)是脉冲信号。
连续信号转变为脉冲信号的过程,成为采样或采样过程。
实现采样的装置成为采样器。
To —采样周期,f s =--To1采样频率,W s =2πf s —采样角频率 2.信号复现因接触时间很小,τo T 〈〈τ,故可把采样器的输出信号)(t e *近似看成是一串强度等于矩形脉冲面积的理想脉冲,为了去除采样本身带来的高额分量,需要把离散信号)(t e *恢复到原信号)(t e 。
实现方法:是在采样器之后串联一个保持器,及信号复现滤波器。
作用:是把)(t e *脉冲信号变成阶梯信号e h (t)3.采样系统结构图r(t),e(t),c(t),y(t)为连续信号,)(t e *为离散信号)(s G h ,)(s G p ,)(s H 分别为保持器,被控对象和反馈环节的传递函数。
(t)r4.采样系统工作过程⇒由保持器5. 采样控制方式采样周期To ⎪⎩⎪⎨⎧=≠=⇒相位不同步采样常数常数6. 采样系统的研究方法(或称使用的数字工具)因运算过程中出现s 的超越函数,故不用拉式变换法,二采用z 变换方法,状态空间法。