加速度传感器测振动位移
- 格式:doc
- 大小:149.00 KB
- 文档页数:7
加速度传感器测振动速度与位移方案1. 测量方法(基本原理)设加速度传感器测量振动所得的加速度为:()a t (单位:m/s 2) 对加速度积分一次可得速率: 11()()[]2Ni i i a a v t a t dt t -=+==∆∑⎰ (单位:m/s) 对速率信号积分一次可得位移:11()()[]2N i i i v v s t v t dt t -=+==∆∑⎰ (单位:m) 其中:()a t 为连续时域加速度波形()v t 为连续时域速率波形 ()s t 为连续位移波形 i a 为i 时刻的加速度采样值 i v 为i 时刻的速率值0a =0;0v =0t ∆为两次采样之间的时间差2. 主要误差分析误差主要存在以下几个方面: 1)零点漂移所带来的积分误差由于加速度传感器的输出存在固定的零点漂移。
即当加速度为0g 时传感器输出并不一定为0,而是一个非零输出error A 。
传感器的输出值为:()a t +error A 。
对error A 二次积分会产生积分累计效应。
2)积分的初始值所带来的积分误差0a 和0v 的值并不为零,同样会产生积分累计效应。
3)高频噪声信号所带来的误差高频噪声信号会对瞬时位移值测量精度带来影响,但积分值能相互抵销而不会带来累计。
3. 解决办法1)零点漂移和积分初始值不为零可以加高通滤波器的方法滤除。
2)高频噪声信号的影响并不大,为了达到更高的精度,可以加一个低通滤波器。
选择高通滤波器和低通滤波器合理的截至频率,可以得到较理想的结果。
(注:高通滤波即去除直流分量;低通滤波即平滑滤波算法)。
4. 仿真研究4.1 问题的前提背景1.本课题研究的对象是桥梁振动的加速度()a t ,速度()v t 和位移()s t ,可以认为桥梁的加速度,速度,位移的总和为0。
即:0()0a t dt ∞=⎰0()0v t dt ∞=⎰()0s t dt ∞=⎰其离散表达式为:00()Ni i a N ===∞∑0()Nii vN ===∞∑0()Nii sN ===∞∑2.加速度传感器测量值存在误差,它主要是在零点漂移和测量噪声两个方面。
实验一 简谐振动幅值测量一、实验目的1.了解振动信号位移、速度、加速度之间的关系。
2.学会用各种传感器测量简谐振动的位移、速度、加速度幅值。
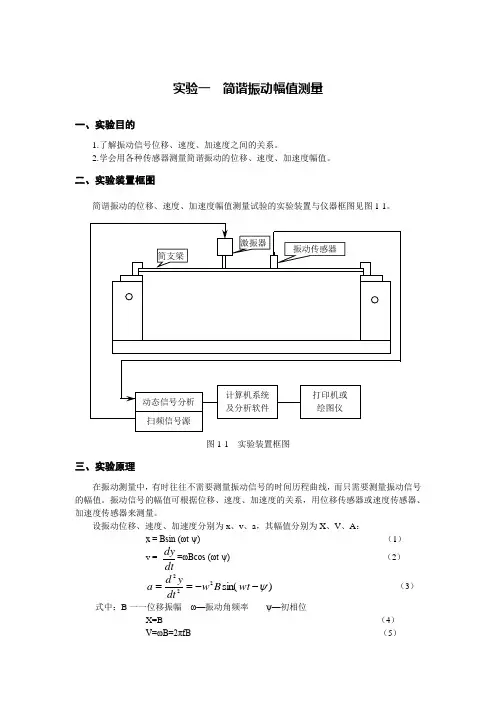
二、实验装置框图简谐振动的位移、速度、加速度幅值测量试验的实验装置与仪器框图见图1-1。
图1-1 实验装置框图三、实验原理在振动测量中,有时往往不需要测量振动信号的时间历程曲线,而只需要测量振动信号的幅值。
振动信号的幅值可根据位移、速度、加速度的关系,用位移传感器或速度传感器、加速度传感器来测量。
设振动位移、速度、加速度分别为x 、v 、a ,其幅值分别为X 、V 、A :x = Bsin (ωt -ψ) (1)v =dtdy =ωBcos (ωt -ψ) (2) )sin(222ψ--==wt B w dtyd a (3)式中:B 一一位移振幅 ω—振动角频率 ψ—初相位X=B (4) V=ωB=2πfB (5)A=ω2B=(2πf)2B (6)振动信号的幅值可根据式(6)中位移、速度、加速度的关系,分别用位移传感器、速度传感器或加速度传感器来测量。
也可利用动态分析仪中的微分、积分功能来测量。
四、实验方法1、安装激振器把激振器安装在支架上,将激振器和支架固定在实验台基座上,并保证激振器顶杆对简支梁有一定的预压力(不要超过激振杆上的标识),用专用连接线连接激振器和DH1301扫频信号源输出接口。
2、连接仪器和传感器把加速度传感器安装在简支梁的中部,输出信号接到电荷放大器的输入端,并将电荷放大器的输出接到数采分析仪的1通道。
3、仪器参数设置打开数采仪器的电源开关,开机进入DAS2003数采分析软件的主界面,设置采样率(2kHz)、量程范围,输入加速度传感器的灵敏度。
打开一个窗口,分别显示三个通道的信号。
4、采集并显示数据调节扫频信号源的输出频率,使梁产生振动。
分别调整电荷放大器为加速度、速度、位移状态,同时在窗口中读取当前振动的最大值(位移、速度、加速度)。
5、计算数据与实验数据比较按公式计算位移、速度或加速度值,并与实验数据比较。

用加速度传感器测量振动位移的方法发表时间:2018-02-07T14:21:14.737Z 来源:《防护工程》2017年第28期作者:范爽王永海荆志彬[导读] 为了预防钻柱振动失效,采用加速度传感器测量钻柱的纵振、横振、扭振及耦合振动。
中国电子科技集团公司第49研究所黑龙江省哈尔滨市 150001摘要:为了预防钻柱振动失效,采用加速度传感器测量钻柱的纵振、横振、扭振及耦合振动。
给出了加速度传感器在钻柱上的安装位置和数量,建立了加速度传感器测试信号值与钻柱振动值的关系式。
本文分析加速度传感器测量钻柱的纵振、横振、扭振及其耦合振动的方法,给出了加速度传感器安装位置和数量,建立了加速度传感器测试信号与钻柱振动加速度的数学表达式。
为验证测量方法的有效性,利用ANSYS仿真软件建立了钻柱振动,对加速度传感器安装位置及个数、测量信号处理方法进行阐述。
关键词:钻柱;振动;加速度;传感器在石油钻井过程中,由于钻柱的旋转、钻头破岩、井壁碰撞等因素作用,会引起钻柱振动,并导致钻柱失效[1]。
对钻柱振动状态分析及减振和防断技术开展了大量研究,主要成果有采用能量法、有限元法进行了钻柱振动分析,并通过钻具设计、减震器应用及钻井参数优化来控制钻柱振动引起的钻具失效。
由于井下钻柱振动状况的复杂性,国内在钻柱振动测试方面的研究较少,例如宿雪通过在钻柱顶部测量振动信号,获得钻头下方地层特性,研究钻柱与井壁之间的接触情况。
只有精确地测试和提取钻柱振动信号,才能更准确分析和诊断钻柱的振动状态。
一、概述位移和加速度是振动测量与分析的两个主要物理量。
长期以来, 人们一直采用直接测量法测量这两个物理量, 即用位移传感器测量位移,用加速度传感器测量加速度。
直接测量法在一般的场合是可行的, 但在一些特殊场合, 由于结构动态特性或试验条件的限制,往往会引起较大的测量误差, 甚至无法正确测量。
例如, 类似桥梁、建筑物这样的大型结构,由于其共振频率较低(一般为0 .15 Hz), 位移很大。
振动的测量原理振动的测量原理是通过不同的传感器或仪器来检测、监测和量化物体的振动状态及其特性。
振动测量在许多领域中都非常重要,包括工程、机械、建筑、地震学等。
以下将详细介绍几种常用的振动测量原理。
1. 加速度传感器原理:加速度传感器是最常用的测量振动的传感器之一。
它的原理基于牛顿第二定律,即物体受到的力与它的质量和加速度成正比。
加速度传感器通过测量物体上的加速度来判断振动的强度和频率。
当物体振动时,加速度传感器会产生与加速度大小成正比的电压信号。
该信号经过放大和滤波后,可以通过数据采集系统记录和分析,获得振动的各种参数。
2. 速度传感器原理:速度传感器是用于测量振动速度的传感器。
它的原理基于牛顿第二定律和黑尔定律,它们表明物体的加速度与速度成正比。
速度传感器通过测量物体上的速度来判断振动的强度和频率。
通常,速度传感器会将振动转换为机械位移量,并将其转化为电压信号。
这个电压信号经过放大和滤波后,可以用于分析和记录振动的特性。
3. 位移传感器原理:位移传感器是用于测量物体振动位移的传感器。
它的原理根据物体振动时的位置变化来判断振动的幅度和频率。
常用的位移传感器有电感式传感器和光学传感器。
电感式位移传感器工作原理是利用物体振动时磁场的变化来测量位移量。
光学位移传感器的工作原理是通过测量物体上的光学位移量来判断振动的幅度和频率。
4. 压电传感器原理:压电传感器是一种测量振动的传感器,它利用压电效应将机械振动转化为电信号。
当物体受到振动时,压电材料产生电荷分离现象,产生电信号。
压电传感器具有高度灵敏度和宽频响特性,适用于高频振动的测量。
5. 光纤传感器原理:光纤传感器是一种基于光学原理的振动测量方法。
它利用光纤的特性来测量物体的振动。
常见的光纤传感器有光纤光栅传感器和光纤干涉仪。
光纤光栅传感器通过测量光纤上光栅的变化来判断振动的频率和强度。
光纤干涉仪则是通过测量干涉光束的相位差来判断振动。
以上是几种常见的振动测量原理,每种原理都有其适用的特定场景。
声纹振动加速度传感器原理1.引言1.1 概述声纹振动加速度传感器是一种广泛应用于工程领域的传感器,用于测量物体在空间中的振动加速度。
它通过感知物体的振动运动,将振动信号转化为电信号,从而实现对物体振动特性的监测与分析。
声纹振动加速度传感器具有灵敏度高、频率范围宽、稳定可靠等特点,被广泛应用于结构健康监测、机械故障诊断、地震预警等领域。
它能够实时监测和记录物体的振动状态,为工程师和科研人员提供重要的参考依据,帮助他们分析物体振动的原因和影响。
与其他传感器相比,声纹振动加速度传感器具有较高的信号灵敏度,能够捕捉微小的振动信号。
这使得它在许多复杂环境中都能正常工作,如高温、高压、高速等极端条件下。
同时,它还具有较快的响应速度和良好的线性特性,在测量过程中能够保持较高的精度。
声纹振动加速度传感器的工作原理是基于牛顿第二定律和质量弹簧阻尼系统的振动原理。
当物体受到外力作用或本身振动时,传感器内部的质量块将随之产生相应的加速度。
利用质量块与压电材料之间的相互作用,声纹振动加速度传感器可以将振动信号转化为电信号,通过电路传输和处理,最终得到物体振动的相关参数,如加速度、速度和位移等。
总之,声纹振动加速度传感器是一种重要的工程测量工具,它能够准确地反映物体的振动状态,并为工程师提供重要的参考数据。
随着科技的进步和应用领域的不断扩大,声纹振动加速度传感器将在更多的领域发挥重要作用,推动工程技术的发展和进步。
1.2文章结构文章结构部分的内容可以包括以下内容:文章的结构对于读者来说非常重要,它可以帮助读者更好地理解文章的内容和逻辑关系。
本文将按照以下结构组织:2.正文2.1 声纹振动加速度传感器的基本原理2.2 声纹振动加速度传感器的工作原理在正文部分,我们将逐步介绍声纹振动加速度传感器的原理和工作机制,旨在让读者对其有一个全面而深入的了解。
首先,在2.1节中,我们将介绍声纹振动加速度传感器的基本原理。
这部分将解释传感器的设计思路、结构和主要组成部分。
压电式传感器测振动实验报告篇一:压电式传感器实验报告一、实验目的:了解压电传感器的测量振动的原理和方法。
二、基本原理:压电式传感器由惯性质量块和受压的压电片等组成。
(观察实验用压电加速度计结构)工作时传感器感受与试件相同频率的振动,质量块便有正比于加速度的交变力作用在晶片上,由于压电效应,压电晶片上产生正比于运动加速度的表面电荷。
三、需用器件与单元:振动台、压电传感器、检波、移相、低通滤波器模板、压电式传感器实验模板。
双踪示波器。
四、实验步骤:1、压电传感器装在振动台面上。
2、将低频振荡器信号接入到台面三源板振动源的激励源插孔。
3、将压电传感器输出两端插入到压电传感器实验模板两输入端,与传感器外壳相连的接线端接地,另一端接R1。
将压电传感器实验模板电路输出端Vo1,接R6。
将压电传感器实验模板电路输出端V02,接入低通滤波器输入端Vi,低通滤波器输出V0与示波器相连。
3、合上主控箱电源开关,调节低频振荡器的频率和幅度旋钮使振动台振动,观察示波器波形。
4、改变低频振荡器的频率,观察输出波形变化。
光纤式传感器测量振动实验一、实训目的:了解光纤传感器动态位移性能。
二、实训仪器:光纤位移传感器、光纤位移传感器实验模块、振动源、低频振荡器、通信接口(含上位机软件)。
三、相关原理:利用光纤位移传感器的位移特性和其较高的频率响应,用合适的测量电路即可测量振动。
四、实训内容与操作步骤1、光纤位移传感器安装如图所示,光纤探头对准振动平台的反射面,并避开振动平台中间孔。
2、根据“光纤传感器位移特性试验”的结果,找出线性段的中点,通过调节安装支架高度将光纤探头与振动台台面的距离调整在线性段中点(大致目测)。
3、参考“光纤传感器位移特性试验”的实验连线,Vo1与低通滤波器中的Vi 相接,低通输出Vo接到示波器。
4、将低频振荡器的幅度输出旋转到零,低频信号输入到振动模块中的低频输入。
5、将频率档选在6~10Hz左右,逐步增大输出幅度,注意不能使振动台面碰到传感器。
四川瞭望工葉自動化控製技術有限公司
四川瞭望Sichuan Binocular Industrial automation control technology co.,Ltd
加速度传感器
振动加速度传感器的应用
车辆驾驶特性研究,火车汽车分级农业机械建筑机械;
产品运输时的振动冲击检测,运输环境调查包装材料的合理化;
管道闸门的泄露检测,设备保养节能对策;
空调机运转状况检测,洁净间智能大厦;
振动公害调查,建筑工地道路交通、工厂地基;
不平衡振动测定,转盘研磨盘硅片清洁机的平衡修正;
大型建造物的抗震性研究,建筑物、大坝、桥大梁、铁塔;
各种设备异常振动的检测和设备诊断,钢铁厂、造纸厂、石油厂水泥厂等旋转机械的振动检测及轴承劣化诊断;
产品振动特性研究,可靠性试验及出厂检测从汽车飞机轮船火箭卫星到马达硬盘风扇家用电器手机等。
TG-3型三轴振动加速度传感器
概述
TG-3型三轴振动加速度传感器是一款尺寸精巧、性价比高、以电压输出且无直流偏置的加速度传感器,广泛应用在姿态矫正,惯性导航,机械振动测试、接触式位移测试、地质勘探、地震波测量、旋转电机偏摆检测等多个测试控制领域。
该款传感器具有体积小、安装
简便、测量精度高、一致性好、抗干扰等特点,能满足用户多样化的要求。
该系列传感器另有防水型可选;
标准配置
TG-3型三轴振动加速度传感器一只,信号调理盒,使用说明书、质保卡、合格证等
技术参数。
振动测量方法、标准及实际振动原因分析及解决方案目录1、振动测量方法 21.1 加速度传感器21.1.1工作原理31.1.2优缺点41.2 速度传感器41.2.1工作原理41.2.2速度传感器优缺点51.3 位移传感器51.3.1工作原理61.3.2优缺点72、振动测量标准 82.1 ISO 10816系列标准82.2ASME标准82.3 DIN标准83、结论 84钢平台振动原因分析及解决方案84.1钢平台振动因素可包括一下几点:81、振动测量方法1.1 加速度传感器压电加速度传感器主要应用的是压电效应,压电效应是最流行的形式。
主要使用加速力而受到的微观晶体结构,压力会在晶体中产生电压,加速度传感器将这个压力转换为速度和方向。
1.1.1工作原理如上图的模型所示,加速度传感器包含微观晶体结构,当发生振动时会产生电压,然后产生的电压会产生加速度的读数。
1.1.2优缺点压电加速度传感器的优点是:1).结构简单,取材方便;2).安装方便,使用寿命长。
压电加速度传感器的缺点:1)谐振频率高,容易受到声音的干扰;2)输出阻抗高,输出信号弱,传感器输出信号需要经过放大电路放大后才能送检测电路检测。
1.2 速度传感器速度传感器可以测量振动的速度。
它适用于低频振动测量和对振动的整体评估,速度传感器可以直接测量振动,并提供振动速度的输出信号。
与加速度传感器相比,速度传感器具有较低的灵敏度和频率响应。
图1(a)图1(b)1.2.1工作原理速度传感器的结构示意如图1(a)所示。
一个圆筒形的线圈固定在外壳内壁,线圈中间有一个永磁铁支承在弹簧上。
传感器的外壳固定在被测对象上,以承受振动。
永磁铁(参振质量)、弹簧和阻尼组成了一个单自由度系统图1(b)。
在设计时使该系统的固有频率远低于被测物振动的频率。
这时在被测物振动时,永磁铁在空间处于静止状态,永磁铁相对于线圈的运动即为被测物的运动。
布置方式:测量轴承座振动(简称座振)时,需要测量垂直、水平、轴向三个方向的振动,因此传感器的位置,也即测点的布置如下图所示。
压电式传感器测量振动实验一、实验目的:1、了解压电式传感器结构及其特点;2、了解压电式传感器测量电路的组成方式和测量振动的方法。
二、基本原理:压电式传感器是一和典型的发电型传感器,其传感元件是压电材料,它以压电材料的压电效应为转换机理实现力到电量的转换。
压电式传感器可以对各种动态力、机械冲击和振动进行测量,在声学、医学、力学、导航方面都得到广泛的应用。
1、压电效应:一些离子型晶体的电介质(如石英、酒石酸钾钠、钛酸钡等)不仅在电场力作用下,而且在机械力作用下,都会产生极化现象。
即:在这些电介质的一定方向上施加机械力而产生变形时,就会引起它内部正负电荷中心相对转移而产生电的极化,从而导致其两个相对表面(极化面)上出现符号相反的束缚电荷,且其电位移D(在MKS 单位制中即电荷密度σ)与外应力张量T 成正比。
当外力消失,又恢复不带电原状;当外力变向,电荷极性随之而变。
这种现象称为正压电效应,或简称压电效应。
具有压电效应的材料称为压电材料,常见的压电材料有两类压电单晶体,如石英、酒石酸钾钠等;人工多晶体压电陶瓷,如钛酸钡、锆钛酸铅等。
压电传感器中主要使用的压电材料包括有石英、酒石酸钾钠和磷酸二氢胺。
其中石英(二氧化硅)是一种天然晶体,压电效应就是在这种晶体中发现的,在一定的温度范围之内,压电性质一直存在,但温度超过这个范围之后,压电性质完全消失(这个高温就是所谓的“居里点”)。
由于随着应力的变化电场变化微小(也就说压电系数比较低),所以石英逐渐被其他的压电晶体所替代。
而酒石酸钾钠具有很大的压电灵敏度和压电系数,但是它只能在室温和湿度比较低的环境下才能够应用。
磷酸二氢胺属于人造晶体,能够承受高温和相当高的湿度,所以已经得到了广泛的应用。
现在压电效应也应用在多晶体上,比如现在的压电陶瓷,包括钛酸钡压电陶瓷、PZT、铌酸盐系压电陶瓷、铌镁酸铅压电陶瓷等等。
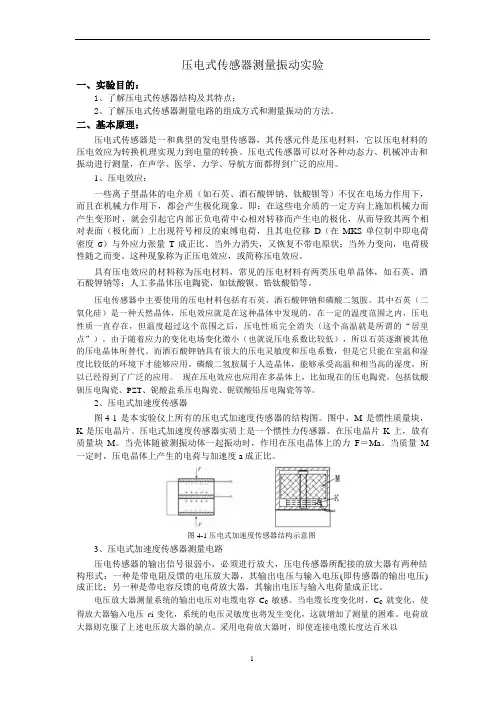
2、压电式加速度传感器图4-1 是本实验仪上所有的压电式加速度传感器的结构图。
压电式加速度传感器的工作原理
压电式加速度传感器是一种利用压电效应测量加速度的传感器。
它由一个压电晶体和质量块组成。
工作原理如下:
1. 当加速度传感器受到加速度作用时,质量块会受到力的作用而发生位移。
2. 位移的变化引起压电晶体的压电效应,从而在晶体上产生电荷。
3. 电荷由传感器输出接口传送到外部电路进行信号处理。
4. 根据电荷的大小,可以计算得到加速度的数值。
压电式加速度传感器的工作原理主要基于压电效应,即一些材料在受到力或压力作用时会产生电荷。
这种工作原理具有快速响应、高精度和宽工作频率范围等优点,因此常被应用于振动测量、机械设备监测、运动控制等领域。
电机振动测量方法
电机振动测量是通过对电机振动信号进行分析,在电机运行过程中,通过测量电机振动信号的幅值、频率和相位等参数,来评估电机的运行状态以及可能存在的故障。
常用的电机振动测量方法有以下几种:
1. 加速度传感器法:使用加速度传感器将电机振动信号转化为电信号,通过测量加速度来评估电机振动情况。
该方法可以测量电机在不同方向上的振动,并可以得到振动的时域和频域信息。
2. 速度传感器法:使用速度传感器来测量电机的转速,并根据转速的变化来评估电机振动情况。
该方法可以快速获取电机转速和振动频率的关系。
3. 位移传感器法:使用位移传感器来测量电机轴向或径向的位移,并根据位移的变化来评估电机振动情况。
该方法可以得到电机轴向或径向的振动情况和变化趋势。
4. 频谱分析法:对电机振动信号进行频谱分析,得到振动信号在不同频率上的能量分布情况。
通过分析频谱可以判断电机是否存在故障,如不平衡、轴承磨损等。
5. 小波分析法:使用小波分析方法对电机振动信号进行分析,可以得到不同尺度下的振动信号信息,对于不同频率范围的振动信号有更好的分辨能力。
以上方法可以单独应用或结合使用,根据具体的需求和电机特点选择合适的测量方法,进行电机振动的监测和分析。
用加速度传感器测量振动位移的方法
用加速度传感器测量振动位移的方法:
1、电涡流式振动传感器
电涡流式振动传感器是涡流效应为工作原理的振动式传感器,它属于非接触式传感器。
电涡流式振动传感器是通过传感器的端部和被测对象之间距离上的变化,来测量物体振动参数的。
电涡流式振动传感器主要用于振动位移的测量
2,电感式振动传感器
电感式振动传感器是依据电磁感应原理设计的一种振动传感器。
电感式振动传感器设置有磁铁和导磁体,对物体进行振动测量时,能将机械振动参数转化为电参量信号。
电感式振动传感器能应用于振动速度、加速度等参数的测量。
3、电容式振动传感器
电容式振动传感器是通过间隙或公共面积的改变来获得可变电容,再对电容量进行测定而后得到机械振动参数的。
电容式振动传感器可以分为可变间隙式和可变公共面积式两种,前者可以用来测量直线振动位移,后者可用于扭转振动的角位移测定。
4、压电式振动传感器.
压电式振动传感器是利用晶体的压电效应来完成振动测量的,当被测物体的振动对压电式振动传感器形成压力后,晶体元件就会产生相应的电荷,电荷数即可换算为振动参数。
压电式振动传感器还可以分为压电式加速度传感器、压电式力传感器和阻抗头,
5、电阻应变式振动传感器
电阻应变式振动传感器是以电阻变化量来表达被测物体机械振动量的一种振动传感器。
电阻应变式振动传感器的实现方式很多,可以应用各种传感元件,其中较为常见的是电阻应变片。
传感器如何用于测量物体的震动频率和动态特性?一、传感器在测量物体震动频率方面的应用传感器是一种能够将某种物理量转换成电信号的装置。
在测量物体的震动频率方面,传感器起到了至关重要的作用。
1. 加速度传感器的应用加速度传感器是测量物体加速度的一种常见传感器。
它通过检测物体的振动来测量物体的震动频率。
当物体发生震动时,加速度传感器会产生微小的电信号,该信号与物体的加速度成正比。
通过对这些电信号进行分析,我们可以得到物体的震动频率。
2. 声波传感器的应用声波传感器是使用声波的原理来测量物体震动频率的一种传感器。
声波传感器通过检测物体所产生的声波信号,来判断物体的震动情况。
当物体发生震动时,会产生相应的声波,声波传感器会将这些声波转换成电信号,并进行分析处理,从而得到物体的震动频率。
二、传感器在测量物体动态特性方面的应用除了测量物体的震动频率,传感器还可以用于测量物体的动态特性。
这包括物体的加速度、速度、位移等信息。
1. 位移传感器的应用位移传感器是一种常见的用于测量物体位移的传感器。
它可以将物体的位移转换成电信号。
通过对这些电信号的分析处理,我们可以得到物体的位移信息,从而了解物体的动态特性。
2. 速度传感器的应用速度传感器是一种用于测量物体速度的传感器。
它可以通过测量物体在单位时间内所产生的位移变化来计算物体的速度。
速度传感器通常采用激光或者光电的原理进行测量,具有精度高、响应快的特点。
3. 加速度传感器的应用在测量物体的动态特性方面,加速度传感器也起到了重要的作用。
加速度传感器可以测量物体在单位时间内所产生的速度变化,从而得到物体的加速度信息。
通过分析这些加速度信息,我们可以了解物体在不同时间点上的加速度变化情况。
总结起来,传感器在测量物体的震动频率和动态特性方面具有广泛的应用。
通过使用不同类型的传感器,我们可以准确地测量物体的震动频率和动态特性,为相关领域的研究和应用提供了有效的工具。
加速度传感器采集振动波的工作原理
为了测量这个位移,加速度传感器通常采用压电效应或电容效应。
压
电效应是最常见的技术,基于材料呈现压电特性时,当施加压力或力矩时,产生电荷的分离。
而电容效应则是基于变化的电容值来测量位移。
在压电传感器中,质量块通常连接到一个或多个压电晶体材料。
当质
量块发生位移时,压电晶体会产生电荷的分离,形成电位差。
这个电位差
可以被测量,从而得知质量块的位移,进而得到加速度的信息。
在电容传感器中,质量块通常与一个或多个电容传感器电极相对靠近。
当质量块发生位移时,电容值会发生变化。
这个变化的电容值可以被测量,从而得到质量块的位移,进而得到加速度的信息。
无论是压电传感器还是电容传感器,它们都需要经过一定的信号处理
来将位移转换为加速度。
传感器输出的电位差或电容值会通过放大器进行
放大,并被转换为标准电压或电流信号。
这个信号可以被进一步处理和分析,从而得到振动波的频率、振幅等信息。
为了提高传感器的精度和灵敏度,一些加速度传感器还会采用陀螺仪、滤波器等辅助技术。
陀螺仪可以用来补偿传感器的非线性响应,减小误差。
滤波器可以用来滤除噪声,提高信号的质量和准确性。
总结起来,加速度传感器通过测量物体的位移,转换为相关的电位差
或电容值,从而得到振动波的加速度信息。
这个信息可以通过信号处理和
分析,获得振动波的频率、振幅等参数。
加速度传感器在工业、医疗、运
动监测等领域有着广泛的应用。
测振仪原理及使用方法测振仪测振仪也叫测震表振动分析仪或者测震笔,是利用石英晶体和人工极化陶瓷(PZT)的压电效应设计而成。
当石英晶体或人工极化陶瓷受到机械应力作用时,其表面就产生电荷。
采用压电式加速度传感器,把振动信号转换成电信号,通过对输入信号的处理分析,显示出振动的加速度、速度、位移值,并可用打印机打印出相应的测量值。
本仪器的技术性能符合国际标准ISO2954及中国国国家标准GB/T13824中,对于振动烈度测量仪和GB13823.3中,正弦激励法振动标准的要求。
它广泛地被应用于机械制造、电力、冶车辆等领域。
测振仪-测振原理在的测振仪一般都采用压电式的,结构形式大致有二种:①压缩式;②剪切式,测振仪原理是利用石英晶体和人工极化陶瓷(PZT)的压电效应设计而成。
当石英晶体或人工极化陶瓷受到机械应力作用时,其表面就产生电荷,所形成的电荷密度的大小与所施加的机械应力的大小成严格的线性关系。
同时,所受的机械应力在敏感质量一定的情况下与加速度值成正比。
在一定的条件下,压电晶体受力后产生的电荷与所感受的加速度值成正比。
产生的电荷经过电荷放大器及其它运算处理后输出就是我们所需要的数据了Q=dij·F =dij·ma式中:Q-压电晶体输出的电荷,dij-压电晶体的二阶压电张量,m-加速度的敏感质量,a-所受的振动加速度值。
测振仪压电加速度计承受单位振动加速度值输出电荷量的多少,称其电荷灵敏度,单位为pC/ms-2或pC/g(1g=9.8ms-2)。
测振仪压电加速度计实质上相当于一个电荷源和一只电容器,通过等效电路简化以后,则可换算出加速度计的电压灵敏度为Sv=SQ/CaSv-,加速度计的电压灵敏度,mV/ms-2SQ-加速度计的电荷灵敏度,pC/ms-2Ca-加速度计的电容量测振仪压电式速度传感器,它是通过在压电式加速度传感器上加一个积分电路,通过将加速度信号积一次分,可以得到振动的速度值!测振仪-主要功能1.配有打印,可打印测量值;2.具有存储功能:可存10个测量值。
加速度传感器测振动速度与位移方案
1. 测量方法(基本原理)
设加速度传感器测量振动所得的加速度为:()a t (单位:m/s 2) 对加速度积分一次可得速率: 1
1()()[
]2N
i i i a a v t a t dt t -=+==∆∑⎰ (单位:m/s) 对速率信号积分一次可得位移:1
1
()()[
]2
N i i i v v s t v t dt t -=+==∆∑⎰ (单位:m) 其中:
()a t 为连续时域加速度波形
()v t 为连续时域速率波形 ()s t 为连续位移波形 i a 为i 时刻的加速度采样值 i v 为i 时刻的速率值
0a =0;0v =0
t ∆为两次采样之间的时间差
2. 主要误差分析
误差主要存在以下几个方面: 1)零点漂移所带来的积分误差
由于加速度传感器的输出存在固定的零点漂移。
即当加速度为0g 时传感器输出并不一定为0,而是一个非零输出error A 。
传感器的输出值为:()a t +error A 。
对error A 二次积分会产生积分累计效应。
2)积分的初始值所带来的积分误差
0a 和0v 的值并不为零,同样会产生积分累计效应。
3)高频噪声信号所带来的误差
高频噪声信号会对瞬时位移值测量精度带来影响,但积分值能相互抵销而不会带来累计。
3. 解决办法
1)零点漂移和积分初始值不为零可以加高通滤波器的方法滤除。
2)高频噪声信号的影响并不大,为了达到更高的精度,可以加一个低通滤波器。
选择高通滤波器和低通滤波器合理的截至频率,可以得到较理想的结果。
(注:高通滤波即去除直流分量;低通滤波即平滑滤波算法)。
4. 仿真研究
4.1 问题的前提背景
1.本课题研究的对象是桥梁振动的加速度()a t ,速度()v t 和位移()s t ,可以认为桥梁的加速度,速度,位移的总和为0。
即:0()0a t dt ∞
=⎰
0()0v t dt ∞
=⎰
()0s t dt ∞
=⎰
其离散表达式为:00()N
i i a N ===∞∑
0()N
i
i v
N ===∞∑
0()N
i
i s
N ===∞∑
2.加速度传感器测量值存在误差,它主要是在零点漂移和测量噪声两个方面。
即测量值()()()measure error a t a t a t =+
其中:()measure a t 为加速度传感器测量加速度值 ()a t 为桥梁振动的实际加速度值
()error a t 为传感器测量误差
3.振动速度与振动位移取决于振动加速度与振动频率,可以证明,振动速度与振动加速度成正比,与振动频率成反比;振动位移与振动速度成正比,与振动频率成反比。
4.2 仿真
1.取一组仿真用振动加速度信号:()9.8sin(240)3measure a t t π=⨯⨯+,如图1所示。
其中:()measure a t 代表加速度传感器测量值
()9.8sin(240)a t t π=⨯⨯代表实际加速度值
()3error a t =代表传感器的零点漂移
传感器测量噪声暂时不讨论。
图1仿真用加速度信号
2.对振动加速度积分一次可以得到振动速率 即()()measure measure v t a t dt =⎰
原始测量信号积分可得图2波形。
其中积分算法为:1()()N
i i v t a t dt a t ===∆∑⎰
图2 对原始信号积分一次的波形(振动速度波形)
可以看到,由于误差项的()3error a t =的存在,振动加速度一次积分波形(振动速度)成递增趋势。
误差信号已经将有用的振动湮没。
故必须在积分之前去除误差项。
对原始加速度信号作一次高通滤波即可消除误差项()error a t ,如图3所示为消除误差项后的振动加速度波形。
采用的高通滤波算法为:01...i i i n
i i a a a a a n
---+++=-∑
消除误差项之后的振动加速度函数为:()9.8sin(240)a t t π=⨯⨯
图3 高通滤波后的振动加速度波形
然后对振动加速度进行一次积分得到图4所示的振动速度波形。
同样积分算法为:
1()()N
i i v t a t dt a t ===∆∑⎰
图4 对消除误差项之后的振动加速度积分一次后的波形(振动速度波形)
3. 对振动速度积分一次可以得到振动位移 即()()measure measure s t v t dt =⎰
图4积分可得图5波形。
其中积分算法为:1()()N
i i s t v t dt v t ===∆∑⎰
由图4可以看出,一次积分,速度全部为正,有直流分量,这是因为假定积分前的速度初始值为零并不正确。
图5 未去除直流分量之前的速度波形一次积分后的波形(振动位移)
振动速度一次积分波形(振动位移)成递增趋势。
直流分量的积分已经将有用的振动湮没。
故必须在积分之前去处消除直流分量。
同样高通滤波可以去除直流分量。
采用的高通滤波算法为:01...i i i n
i i v v v v v n
---+++=-∑
图6是对图4进行高通滤波后的振动速度波形。
图7是对图6进行一次积分后的波形(振动位移)。
图6 高通滤波后的振动速度波形
图7 对高通滤波后的振动速度一次积分后的波形(振动位移)
4.同样,由于假定积分前的位移初始值为零并不正确,故速率波形也存在一定的直流分量,
再进行一次高通滤波即可得到正确的振动位移波形。
如图8所示。
采用的高通滤波算法为:01...i i i n
i i s s s s s n
---+++=-∑
图8 高通滤波后的振动位移波形
到此,图1中存在零点漂移的振动加速度仿真波形经过两次积分,三次高通滤波得到了振动位移波形。
图3满足0
()0a t dt ∞
=⎰,图6满足0
()0v t dt ∞
=⎰,图8满足0
()0s t dt ∞
=⎰,证明了
该算法的正确性和该方案的可实施性。
5. 考虑测量噪声存在的情况
对仿真用的振动加速度加上幅值为±0.5的白噪声,测量结果如图9,图10和图11所示。
由于噪声信号noise a 满足00()N
noise i a N ===∞∑,故对积分后的信号不会产生影响。
图9 加噪声之后的振动加速度高通滤波后的波形
图10 加噪声之后的振动速度高通滤波后的波形图11 加噪声之后的振动位移高通滤波后的波形。