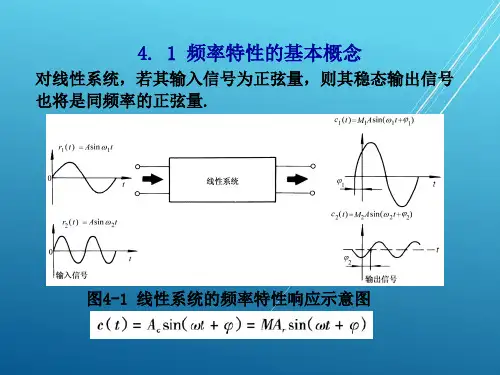
自控理论 4-3对数坐标图
- 格式:ppt
- 大小:11.56 MB
- 文档页数:57
自动控制原理总结第一章绪论技术术语1. 被控对象:是指要求实现自动控制的机器、设备或生产过程。
2. 被控量:表征被控对象工作状态的物理参量(或状态参量),如转速、压力、温度、电压、位移等。
3. 控制器:又称调节器、控制装置,由控制元件组成,它接受指令信号,输出控制作用信号于被控对象。
4. 给定值或指令信号r(t):要求控制系统按一定规律变化的信号,是系统的输入信号。
5. 干扰信号n(t):又称扰动值,是一种对系统的被控量起破坏作用的信号。
6. 反馈信号b(t):是指被控量经测量元件检测后回馈送到系统输入端的信号。
7. 偏差信号e(t):是指给定值与被控量的差值,或指令信号与反馈信号的差值。
闭环控制的主要优点:控制精度高,抗干扰能力强。
缺点:使用的元件多,线路复杂,系统的分析和设计都比较麻烦。
对控制系统的性能要求:稳定性快速性准确性稳定性和快速性反映了系统的过渡过程的性能。
准确性是衡量系统稳态精度的指标,反映了动态过程后期的性能。
第二章控制系统的数学模型拉氏变换的定义:几种典型函数的拉氏变换1.单位阶跃函数1(t)2.单位斜坡函数3.等加速函数4.指数函数e-at5.正弦函数sin ωt6.余弦函数cos ωt7.单位脉冲函数(δ函数)拉氏变换的基本法则1.线性法则2.微分法则3.积分法则4.终值定理5.位移定理传递函数:线性定常系统在零初始条件下,输出信号的拉氏变换与输入信号的拉氏变换之比称为系统(或元部件)的传递函数。
动态结构图及其等效变换1.串联变换法则2.并联变换法则3.反馈变换法则4.比较点前移“加倒数”;比较点后移“加本身”。
5.引出点前移“加本身”;引出点后移“加倒数”梅森(S. J. Mason)公式求传递函数典型环节的传递函数1.比例(放大)环节2.积分环节3.惯性环节4.一阶微分环节5.振荡环节6.二阶微分环节第三章时域分析法二阶系统分析二阶系统的单位阶跃响应1.过阻尼ξ>1的情况:系统闭环特征方程有两个不相等的负实根。

实验一 典型环节模拟研究1.1 实验目的1.熟悉并掌握TD-ACC +设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃响应曲线和实际阶跃响应曲线。
对比差异、分析原因。
3.了解参数变化对典型环节动态特性的影响。
1.2 实验设备PC 机一台,TD-ACC +实验系统一套。
1.3 实验原理及内容下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。
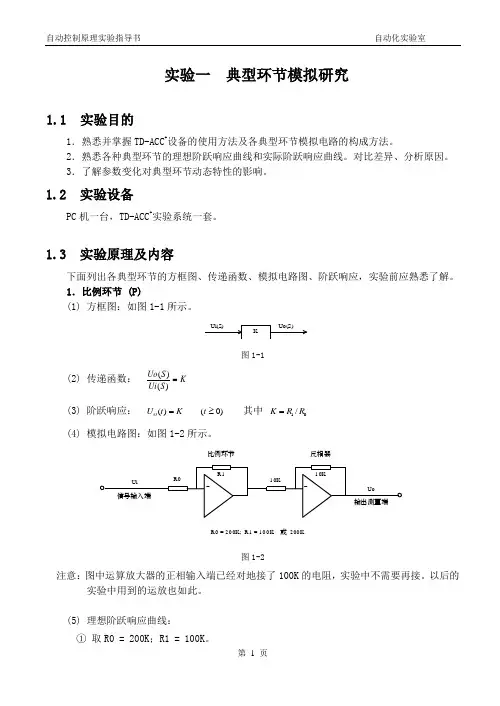
1.比例环节 (P)(1) 方框图:如图1-1所示。
图1-1(2) 传递函数:K S Ui S Uo =)()( (3) 阶跃响应:)0()(≥=t Kt U O 其中 01/R R K =(4) 模拟电路图:如图1-2所示。
图1-2注意:图中运算放大器的正相输入端已经对地接了100K 的电阻,实验中不需要再接。
以后的实验中用到的运放也如此。
(5) 理想阶跃响应曲线:① 取R0 = 200K ;R1 = 100K 。
② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I)(1) 方框图:如右图1-3所示。
图1-3(2) 传递函数:TSS Ui S Uo 1)()(=(3) 阶跃响应: )0(1)(≥=t t Tt Uo 其中 C R T 0=(4) 模拟电路图:如图1-4所示。
图1-4(5) 理想阶跃响应曲线:① 取R0 = 200K ;C = 1uF 。
② 取R0 = 200K ;C = 2uF 。
3.比例积分环节 (PI)(1) 方框图:如图1-5所示。
图1-5(2) 传递函数:TSK S Ui S Uo 1)()(+= (3) 阶跃响应: )0(1)(≥+=t tTK t Uo 其中01/R R K =;C R T 0=(4) 模拟电路图:如图1-6所示。
图1-6(5) 理想阶跃响应曲线:①取R0 = R1 = 200K;C = 1uF。
②取R0=R1=200K;C=2uF。
4.惯性环节 (T)(1) 方框图:如图1-7所示。
第三章习题参考答案(缺1张图)3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时3-3 (1)())24.0,/12.2(,%286.7%,6.46==±==ζωs rad s t M n s p ;(2)())5.0,/1(,%28%,3.16==±==ζωs rad s t M n s p ;(3)s t s 15=)25.1,/4.0(,==ζωs rad n ,过阻尼系统,无超调。
3-4 s rad n /588.19,598.0==ωζ. 3-7 (1) %).2(33.3,96.1,%49.9±===s t s t M s p p(2)44.240)()(2++=s s s R s C ,s rad n /2,6.0==ωζ. 3-8 (1) t te e t g 10601212)(--+-=;(2)60070600)()(2++=s s s R s C , s rad n /49.24,429.1==ωζ. 3-10 (1)系统稳定。
()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω(2)劳斯阵列第一列符号改变两次,根据劳斯判据,系统有两个极点具有正实部,系统不稳定。