自升式钻井平台完整稳性计算方法研究
- 格式:pdf
- 大小:293.48 KB
- 文档页数:6
自升式钻井平台稳性计算书的建立及应用探究发布时间:2022-09-15T05:18:57.431Z 来源:《科技新时代》2022年4期2月作者:贾永兴[导读] 自升式钻井平台与航行船舶存在较大差异,尤其是在对其稳性展开计算时,计算方法贾永兴中海油田服务股份有限公司河北省廊坊市 065201摘要:自升式钻井平台与航行船舶存在较大差异,尤其是在对其稳性展开计算时,计算方法与模型各不相同,基于此,本文以自升式钻井平台为核心,先行探究该平台稳性计算书的建立要点,继而以CJ46型自升式钻井平台为基础,采用NAPA软件对其稳性展开进一步探究,以供参考。
关键词:自升式钻井平台;稳性计算书;建立及应用引言:自升式钻井平台是一种海洋石油勘探设备。
其运行稳定性与垂直方向的插桩作业和水平方向的抗滑能力密切相关。
现有的嵌入式单元运行稳定性研究仅基于经典理论公式和数值计算结果,忽略水平荷载的影响,简单地将水平荷载和垂直荷载分开讨论。
结果与实际情况相差很大,这将导致桩腿插入不到位的现象。
因此,需要进一步计算自升式钻井平台的稳定性,以提高自升式钻井平台的运行稳定性。
一、自升式钻井平台稳性计算书的建立要点1.波流载荷当平台位于底部时,波浪荷载主要作用在小尺度的桩腿上,桩腿之间的距离也相对较大,相互作用相对较小,因此可以将其视为小尺度的隔离桩,因此可以使用莫里森公式来计算波浪力。
在自存条件下,平台最大工作水深76.2m,最大波高16.46m/s,相应周期为13.5s,表面速度为0.5m/s,极限条件为桩腿位于海底淤泥表面以下3M处。
考虑到波、流入射方向与风荷载方向一致的最危险情况,建立桩腿的sacs模型。
桩腿桁架由弦杆、斜杆、水平杆和内杆组成。
绳架材料的屈服极限为690mpa,其他部件的屈服极限为360MPa,材料的弹性模量定义为200GPa:一旦桩靴位于泥面以下3M处,因此不考虑桩靴的变形和破坏,将桩靴模拟为具有大刚度和屈服极限的构件;将平台主体视为刚性体,与桩腿刚性连接,忽略齿轮箱与机架之间的啮合间隙,平台主体自重均匀分布在三个桩腿上;考虑到海洋生物修正的曳力系数和惯性力系数,根据两端齿间的长度,计算弦架在波浪流力作用下的有效长度,波浪流采用斯托克斯五阶波和恒定流[1]。
胜利作业平台拖航稳性分析计算摘要:移动式平台是开发海洋石油的基础装备,尤其以自升式平台为主。
文章以典型的自升式平台胜利作业平台为例,运用水动力有限元分析软件建立了平台模型进行分析,计算平台拖航的完整稳性和破舱稳性数据,得到不同状态下的初稳性高和稳性衡准数。
通过计算分析,探讨该类型平台拖航稳性的最不利工况,判定该平台稳性是否满足要求。
关键词:自升式平台;完整稳性;破舱稳性;MOSES平台拖航时桩腿升起,高耸的桩腿导致风倾力矩增加,同时桩腿与桩靴自重较大,升桩致使平台重心显著升高,对平台拖航稳性造成极其不利的影响,因此该状态下海上移动式平台比较危险。
据文献统计,在平台完全损失事故中,因稳性缺陷引起的事故接近35%[1]。
本文胜利作业平台为例,对平台拖航完整稳性和破舱稳性进行分析,以便为自升式平台拖航稳性的校核提供算例。
1 平台稳性规范要求1.1 完整稳性与船舶类似,平台稳性主要指在外力作用下平台偏离平衡位置而发生倾斜,当外力消失后,其能自行回复到原来平衡位置的能力[2]。
平台稳性随装载量的变化而变化,为保证平台在各个工况下的稳性都能够满足规范要求,需要对远洋拖航、油田拖航等多种进行稳性计算校核。
平台稳性校核的关键在于确定风倾力矩(表示在恶劣海况下风对平台作用的动倾力矩)和复原力矩(表示在最危险的情况下平台抵抗外力矩的极限能力)[2],二者之比称为稳性衡准数,其值大于等于1时可满足稳性要求对于船舶和浮式平台,至第2交点或进水角处的复原力矩曲线下面积中的较小者至少应比至同一限定角处风倾力矩曲线下的面积大40%,也就是说,复原力矩与风倾力矩曲线面积之比大于等于 1.4(面积比即稳性衡准数),即(A + B)≥ 1.4(B + C)(图1),对应的倾角是第2交点或者入水点(两者取较小者)。
1.2 破舱稳性规定的外加风压作用下平台破舱后依靠自身倾斜后的复原力矩,仍能保持不再继续进水的能力即平台的破舱稳性[3]。
自升式钻井平台设计规范与技术研究周佳;任铁;龚诗【摘要】自升式钻井平台广泛应用于近海油气资源开发.随着设计开发和研究的不断深入,其应用已逐步向中等水深过渡.与此同时,船级社的规范要求也伴随着审查和检验经验的丰富,不断贴合实际并增补内容.此外,设计技术和计算能力的发展,也为自升式钻井平台的开发提供了有力保证.以往通过经验性或估算的设计值,现在可以通过数值分析取得更准确合理的评估结果.文中跟踪主流船级社自升式平台规范的发展和更新,结合JU2000E和CJ50型平台设计开发经验,对自升式钻井平台的设计开发技术进行对比讨论.相关结论可供海洋工程设计者参考.【期刊名称】《船舶》【年(卷),期】2017(028)001【总页数】5页(P16-20)【关键词】自升式钻井平台;设计;规范【作者】周佳;任铁;龚诗【作者单位】中国船舶及海洋工程设计研究院上海200011;中国船舶及海洋工程设计研究院上海200011;上海外高桥船舶及海洋工程设计研究院上海200137【正文语种】中文【中图分类】U674.38+1自升式钻井平台最先出现在美国。
其作业区已由浅滩发展至浅水,目前正不断向深水甚至极地等环境条件恶劣的区域拓展。
当今,主流新开发的自升式平台作业水深已超百米,甚至某些高等级平台称其作业水深已达到约200 m[1]。
自升式钻井平台通常为方形(四桩腿)或三角形(三桩腿)主船体,通过升降及锁紧机构与桩腿相连。
桩腿通常分为壳体式和桁架式两类,壳体式桩腿(圆柱或方柱)一般只用于60~70 m以下的水深,而深水自升式平台一般都使用桁架式桩腿。
平台就位后,桩腿从围井区下放,桩靴(或沉垫)插入海底,主船体抬升离开水面并预留一定气隙。
平台工作时,悬臂梁结构外伸配合钻台就位,实施钻探作业。
悬臂梁主体一般为框架结构,井架和钻台均安装于悬臂梁,悬臂梁通过轨道及滑动装置与主甲板连接。
在各类离岸钻采装备中,由于自升式平台的大型结构部件之间经常发生相对移动,需各部分协同配合,因此设计难度很大,建造精度要求也最高。
第14卷 第3期 海 洋 工 程 V o l.14,N o.3 1996年8月 TH E OCEAN EN G I N EER I N G A ugust,1996自升式平台拖航稳性研究潘 斌 刘 震 卢德明 (上海交通大学,上海,200030) (上海船舶检验局,上海,200135)摘 要 本文计算了各类自升式平台在不同拖航操作状态下的稳性,并根据计算结果分析研究了这些操作的利弊。
本文可供自升式平台设计、操作和检验者参考。
关键词 自升式平台 拖航稳性1 引言随着我国海洋石油开发的逐步发展,自升式平台投入使用的数量在不断增长。
由于自升式平台受风面积大、重心高且操作较之其它类型平台复杂,它的拖航稳性一直为设计、操作和检验部门所重视。
本文计算了沉垫压载、桩靴灌水、桩腿下放及平台重心纵向移动等操作状态下的拖航稳性。
通过分析研究我们可以看到:根据现行的移动式平台稳性衡准[1],利用压载来降低重心改善稳性,有时不能达到目的,甚至还会出现相反的情况。
此外,由于自升式平台必须校核不同倾斜方向的稳性,因此重心的纵向移动和垂向移动对稳性有着同样重要的影响。
这些结论与船舶稳性中的概念有所不同,值得引起海洋工程设计研究人员及检验部门的重视。
本文计算使用的移动式平台稳性计算系统已通过上海船舶检验局规范所的验收,该系统采用计算方法见[2]。
2 沉垫压载和桩靴灌水对稳性的影响211 沉垫压载对拖航稳性的影响对于沉垫支承自升式平台来说,沉垫压载降低了重心,减小了风倾力矩。
这两者对稳性都是明显有利的。
另一方面,将沉垫中压载水排出去的操作也是耗时费力的。
因此有操作者在沉垫压载的状态下进行远距离拖航。
虽然在此拖航状态下平台的干舷满足载重线规范的要求,但稳性可能不满足规范的要求。
图1给出了一沉垫支承自升式平台在沉垫拖航和主体拖航(沉垫潜没水中)两种操作状态下的完整稳性恢复力臂和风倾力臂曲线。
虽然沉垫压载后重心下降了3120m,风倾力臂也降低了38%,但由于形状力臂损失较大,稳性范围缩小而导致稳性衡准数k从1191锐减至1114,小于规范要求的114。
自升式钻井平台拖航稳性计算书的优化与应用何磊发布时间:2023-05-18T09:39:13.069Z 来源:《中国科技信息》2023年4期作者:何磊[导读] 稳性计算是自升式钻井平台的关键参数,在拖航(漂浮)、压载状态时,稳性的计算对平台吃水胜利石油工程公司海洋钻井公司新胜利二号平台摘要:稳性计算是自升式钻井平台的关键参数,在拖航(漂浮)、压载状态时,稳性的计算对平台吃水、拖航阻力、桩腿作用力等方面有着重要的影响,而通用的稳性计算书不能很好地反映平台在拖航(漂浮)状态下横纵倾角度、桩腿下放高度对重心的影响等多方面的具体参数及影响,本文以LeTourneau Super116E型自升式钻井平台国海国胜为例,以优化过的稳性计算书对上述方面进行完善并在实际中进行应用。
关键词:自升式钻井平台;稳性计算书;优化与应用引言:钻井平台拖航属于高风险作业,油田拖航及远距离拖航均要控制和保持钻井平台的稳性,掌握钻井平台拖航状态下计算方法可以降低或消除平台在拖航、就位和升降作业过程中的重大事故的发生。
进行稳性计算的人员需要按国家规定接受稳性与压载技术培训并取得相关资质证书,稳性计算书的计算结果要由中国船级社等部门审核通过后签发适拖证书,方可进行拖航作业。
使用优化过的稳性计算书,对平台在拖航前的稳性计算,确保拖航作业安全进行有着重要的意义和作用。
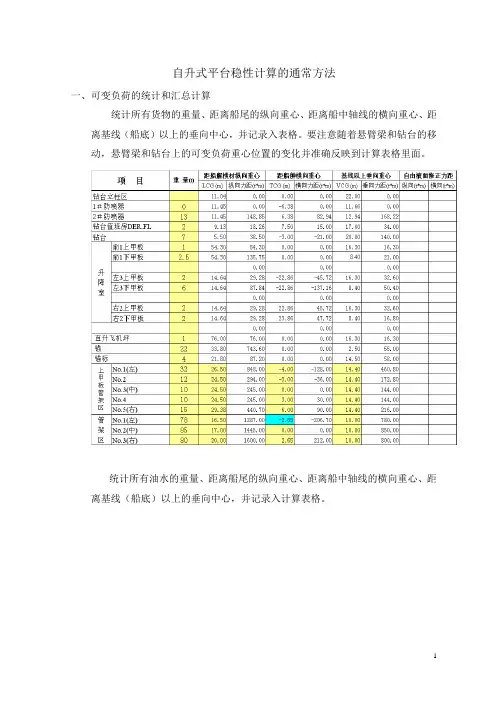
1、可变载荷的统计和汇总计算可变载荷表包括平台当前装载的液体和固体的可变载荷,以及空船重量变化数据。
在拖航前测量平台所有柴油、淡水、钻井水、泥浆等液体舱室内液位高度(记录单位inch)并记录,查询舱容表,将舱室内液位高度的相对应重量(记录单位kips)、距离船尾的纵向重心(LCG)、距离船中轴线的横向重心(TCG)、距离基线(船底)以上的垂向中心(VCG)等数值(记录单位ft)填入可变载荷记录表中。
在填写时应注意船体横向重心位置,如舱室位置在平台横向重心(TCG)的左舷方向时,数值前为“-”号;在右舷方向时,数值前为“+”号或省略。
简析自升式钻井平台拖航中的稳性问题AQUARIUSLW摘要:自升式钻井平台,又称为桩脚式钻井平台,是目前国内外应用最为广泛的钻井平台。
而平台拖航作业是存在较大风险的,自升式平台由于重心高、受风面积,在拖航过程中遭遇恶劣天气,必须保证平台的漂浮稳性能抵御外界环境载荷导致的倾覆力矩,在实际操作我们通常采用调整可变载荷、排除桩靴水和降桩的方法改善平台的稳性。
本文主要以CPOE10平台为模型,探讨实际操作对改善平台稳性的影响。
关键词:自升式平台稳性计算重心1、引言我国陆地油气资源勘探开发程度现已很高,油气资源正迅速减少。
向海洋进军,开发新的油气资源已成必然趋势。
我国拥有漫长的海岸线和广阔的海域,油气资源十分丰富。
在渤海、南黄海、东海、南海已有发现并进入早期开采。
自升式钻井平台属于海上移动式平台,由于其定位能力强和作业稳定性好,在大陆架海域的油气勘探开发中居重要地位, 自升式平台投入使用的数量在不断增长。
但是自升式平台受风面积大、重心高且操作较之其它类型平台复杂, 它的拖航稳性一直为操作和检验部门所重视。
本文以CPOE10平台为模型,分析并计算了调整和排除可变载荷、桩靴灌水、桩腿下放等操作状态下的拖航稳性,为平台以后远距离拖航安全作业提供依据。
2、调整可变载荷,使得拖航平台稳性最优平台稳性分析:A、根据稳性计算表将计算出的排水量与操船手册给出的额定负载线排水量(9459T)进行比较,不得超载,如果计算出的排水量超过了负载线排水量,那么就必须从平台上进行减载。
B、平台的平稳性及对吃水差a. 计算出的艏艉吃水差:保持适当的艉倾(即LCG> LCB),减小拖航阻力,拖带点一般都布置在船艏,拖力对平台产生的力矩使平台艏部下沉,所以保持适当的艉倾(约30cm)。
b. 计算出的左右舷吃水差:平台的横倾增大了一侧的受风面积,从而增大了倾覆力矩,平台倾覆主要是由于横倾造成的,所以要对平台进行调平以减小横倾,提高平台稳性。
文章编号:1001-4500(2005)01-0012-06辽河作业一号平台着底稳性的研究设计郭洪升(胜利石油管理局钻井工艺研究院,东营257017) 摘 要:结合辽河作业一号自升式平台叙述了自升式平台着底稳性的设计特点,对如何根据平台的主要参数及环境条件进行平台的环境载荷、着底稳性(抗倾、抗滑及地基承载力)的计算进行了重点介绍。
关键词:自升式平台;着底稳性;环境载荷 中图分类号:P752 文献标识码:A1 前言 辽河作业一号平台是由胜利石油管理局钻井工艺研究院为辽河石油勘探局钻井一公司设计、青岛北海船厂承建的我国第一艘电驱动齿轮齿条升降的三桩腿自升式修井作业平台。
该平台于2003年8月完成设计并通过中国船级社海工审图中心的审查。
同年9月在青岛北海船厂施工建造,于2004年9月下水。
自升式平台的着底稳性研究包括三个内容:抗倾稳性、抗滑稳性及地基承载力分析。
它对平台的使用性能和安全性能起着重要作用,直接影响到平台的操作性能和安全。
任何一项指标达不到要求,都将导致平台整个设计的失败,甚至带来特大灾难性事故。
而滑移和下陷是平台地基破坏的主要形式,因此在平台的设计中必须对平台的着底稳性进行重点研究,并按规范要求进行详细计算校核。
2 平台的主要参数及环境条件 辽河作业一号平台为钢质,非自航,由平台主体、桩腿(带桩靴)、升降系统三部分组成。
平台主体平面形状接近三角形,三根圆柱形桩腿布置在艏、艉,桩靴为正八边形。
平台的主要任务是对水深4.5~25m(含天文潮差)范围内的油井进行修井作业,平台为无冰期作业。
2.1 平台的主要参数主体尺度:型长43m,型宽36m,型深4.5m; 桩腿尺度:直径:2.7m,长:60m,数量:3根;桩靴尺度:长5.7m,宽5.7m,高1.6m,底面积27m2;升船能力:1179t×3,升降速度0.36m/min;修井机:最大钩载1700kN;前后桩腿中心纵向间距:31m;后桩腿中心横向间距:24m;作业状态:重量4407.2t,其中可变载荷1056.5t;重心X g=17.698m,Y g=0.076m;自存状态:重量4072.2t,其中可变载荷721.5t;重心X g=17.348m,Y g=-0.020m。