SIFT算法详解及应用(课件)-尺度不变特征变换匹配算法
- 格式:ppt
- 大小:3.44 MB
- 文档页数:69



图像特征提取与匹配之SIFT算法尺度不变特征转换(Scale-invariant feature transform 或SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由David Lowe 在1999年所发表,2004年完善总结。
Sift算法就是用不同尺度(标准差)的高斯函数对图像进行平滑,然后比较平滑后图像的差别,差别大的像素就是特征明显的点。
一、Sift算法的步骤Sift ( Scale In varia nt Feature Tran sform )是一个很好的图像匹配算法,同时能处理亮度、平移、旋转、尺度的变化,利用特征点来提取特征描述符,最后在特征描述符之间寻找匹配。
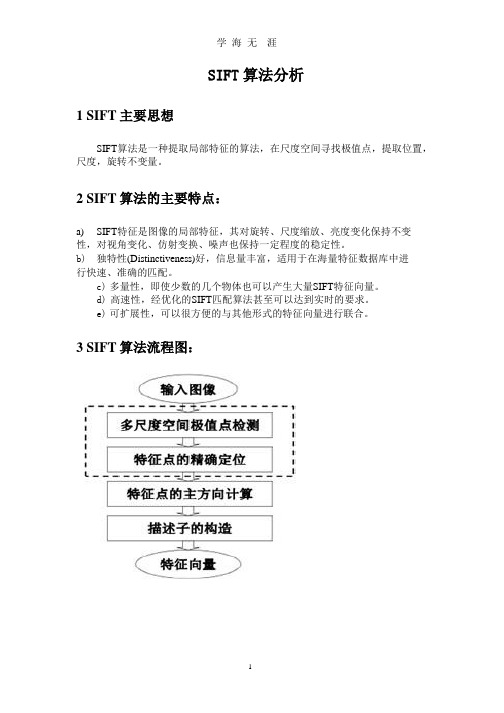
该算法主要包括5个步骤进行匹配:1、构建尺度空间,检测极值点,获得尺度不变性;2、特征点过滤并进行精确定位,剔除不稳定的特征点;3、在特征点处提取特征描述符,为特征点分配方向值;4、生成特征描述子,利用特征描述符寻找匹配点;以特征点为中心取16*16的邻域作为采样窗口,将采样点与特征点的相对方向通过高斯加权后归入包含最后获得4*4*8的128维特征描述子。
8个bin的方向直方图, 示意图如下:5、计算变换参数。
当两幅图像的Sift特征向量生成以后,下一步就可以采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。
取图1的某个关键点,通过遍历找到图像2中的距离最近的两个关键点。
在这两个关键点中,如果次近距离除以最近距离小于某个阙值,则判定为一对匹配点。
最后,看下Sift算法效果图:F图左边部分Sift算法匹配结果,右边部分是其它算法匹配结果:二、Sift算法的描述在上述的Sift算法步骤一中,提到了尺度空间,那么什么是尺度和尺度空间呢? 尺度就是受delta这个参数控制的表示。
而不同的L (x,y,delta) 就构成了尺度空间,实际上,具体计算的时候,即使连续的高斯函数,都要被离散为(一般为奇数大小) (2*k+1) *(2*k+1) 矩阵,来和数字图像进行卷积运算。


SIFT特征提取与匹配原理的深入解析一、引言在图像处理和计算机视觉领域,尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)是一种被广泛应用的算法。
SIFT特征提取与匹配原理是图像处理中的重要一环,对于图像识别、图像配准、3D建模、物体跟踪等应用具有重要意义。
本文将深入解析SIFT特征提取与匹配原理,包括其基本概念、算法流程、优缺点以及应用场景。
二、SIFT特征提取原理1. 尺度空间极值检测SIFT算法首先通过构建尺度空间,在不同尺度下搜索所有可能的特征点。
这个过程是通过高斯差分(Difference of Gaussians,DoG)来实现的,它可以有效地检测出图像中的局部极值点,这些点具有尺度不变性,即无论图像被放大或缩小,这些点都能被检测到。
2. 特征点定位在检测到局部极值点后,SIFT算法会进行精确的定位。
这个过程包括去除低对比度的点和边缘点,因为这些点不稳定且对噪声敏感。
通过拟合三维二次函数来精确确定特征点的位置和尺度。
3. 方向分配为了使描述符具有旋转不变性,SIFT算法会为每个特征点分配一个主方向。
这是通过计算特征点周围像素的梯度方向和大小来实现的。
主方向是通过直方图统计梯度方向并找到最大的峰值来确定的。
4. 描述符生成最后,SIFT算法会生成一个描述符,用于描述特征点周围的图像信息。
描述符是通过将特征点周围的区域划分为4x4的子区域,并计算每个子区域的梯度方向和大小直方图来生成的。
描述符是一个128维的向量,具有对尺度、旋转和光照变化的不变性。
三、SIFT特征匹配原理在生成了SIFT描述符后,就可以进行特征匹配了。
这个过程是通过计算两个描述符之间的欧氏距离来实现的。
距离越小,表示两个特征点越相似。
为了提高效率,通常会使用K-D树等数据结构来加速匹配过程。
此外,还可以使用RANSAC等算法来消除误匹配,提高匹配的准确性。
四、优缺点分析SIFT算法的优点主要体现在以下几个方面:1. 尺度、旋转和光照不变性:SIFT描述符具有对尺度、旋转和光照变化的不变性,这使得它在各种场景下都能取得较好的效果。
SIFT算法详解SIFT(Scale-Invariant Feature Transform)算法是一种用于计算图像特征的算法,最早由David Lowe于1999年提出,是一种用于在不同尺度和旋转下具有不变性的特征描述算法。
1.关键点检测:SIFT算法首先对图像进行多尺度空间的检测,即在图像中寻找尺度空间极值点。
为了实现尺度不变性,SIFT算法采用了高斯金字塔的方法来对图像进行多尺度模糊处理。
金字塔的每一层可以通过对上一层图像进行下采样和卷积来生成。
然后,在每一层金字塔上使用一种拉普拉斯算子来计算尺度空间的极值点,这些极值点包括图像的边缘点、角点和斑点等。
极值点的检测是通过对每个像素点的周围像素点进行梯度计算和方向估计来实现的。
2.关键点描述:在关键点检测之后,SIFT算法通过计算每个关键点的局部图像梯度直方图来对关键点进行描述。
首先,将关键点周围的领域分为若干个子区域,一般为16个,每个子区域可以通过将关键点周围的区域划分为4×4个小区域来实现。
然后,对每个小区域中的像素点计算其梯度幅值和方向,并将其分到相应的方向直方图中。
通过对所有子区域的梯度方向直方图进行拼接,就可以得到整个关键点的描述子。
描述子的维度一般为128维,特征向量的每个维度包含了关键点的领域中的梯度方向信息。
3.特征匹配:在关键点描述之后,SIFT算法使用一种基于特征向量距离的匹配方法来实现图像特征点的匹配。
常用的方法是计算两个特征向量之间的欧式距离,并使用一个阈值来筛选出较为相似的特征点。
为了提高匹配的准确性和稳定性,SIFT算法使用了一种自适应的阈值筛选方法,通过计算两个特征向量距离的比值来判断特征点的匹配性。
总结来说,SIFT算法通过对图像进行多尺度的检测、关键点的描述和特征的匹配,实现了对图像特征的提取和匹配。
这种算法对于图像的尺度变化、旋转变换和部分遮挡等具有一定的不变性,因此被广泛应用于图像处理、目标识别和三维重建等领域。
sift(尺度不变特征变换)的原理尺度不变特征变换(Scale-Invariant Feature Transform,简称SIFT)是一种用于图像处理和计算机视觉领域的特征提取算法,由David Lowe在1999年首次提出。
与其他特征提取算法相比,SIFT具有尺度不变性、旋转不变性、光照不变性和局部性等特点,因此在许多应用领域中得到了广泛应用,如物体识别、图像匹配和三维重建等。
SIFT算法主要包括四个关键步骤:尺度空间极值点检测、关键点定位、关键点方向分配和局部特征描述。
第一步,尺度空间极值点检测。
图像中的一个关键点应该能在不同尺度的图像中被检测到。
为了实现尺度不变性,SIFT算法采用高斯差分函数(Difference of Gaussian, DoG)来检测尺度空间中的极值点。
高斯差分图像是通过两个不同尺度的高斯模糊图像相减得到的。
在不同的尺度和位置上,对差分图像进行非极大值抑制和阈值处理,得到稳定的关键点。
第二步,关键点定位。
在每个尺度空间中检测到的极值点需要进行精确定位,以提取具有稳定性和鲁棒性的关键点。
SIFT算法引入了尺度空间的二阶偏导数来计算关键点的位置和尺度。
通过建立高斯金字塔,利用图像的不同分辨率,通过差分图像计算尺度。
然后,在关键点周围的邻域内,通过二阶偏导数来确定关键点的位置。
第三步,关键点方向分配。
为了使计算机具有旋转不变性,SIFT算法需要为每个关键点分配一个主方向。
在关键点周围的邻域内,计算梯度幅值和方向,构建梯度直方图。
然后,在梯度直方图中寻找主方向,选取梯度幅值最大的方向作为关键点的主方向。
第四步,局部特征描述。
SIFT算法通过关键点的局部邻域计算局部特征描述子,以实现光照不变性和局部性。
在关键点周围的邻域内,通过建立一个统一的坐标系,将关键点归一化为固定大小的邻域。
然后,在归一化的邻域内计算梯度幅值和方向。
为了增强鲁棒性,SIFT采用了高斯加权窗口来抑制噪声和光照变化的影响。