惯性器件模型分析
- 格式:ppt
- 大小:2.95 MB
- 文档页数:95
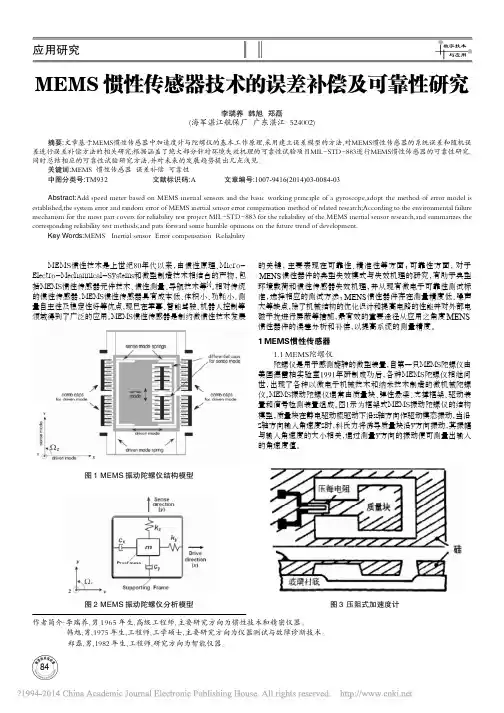
MEMS陀螺误差模型标定实验与分析李勋;张欣;孙朔冬;鲍其莲【摘要】In this paper, two simplified linear and nonlinear models were established for MEMS gyroscopes static errors as well as a random model for random errors exiting in gyroscopes. Parameters of static models were estimated by least square method. The parameters of random error models were given by Allan variance analysis. The experiment results of two MEMS gyroscopes showed that the characteristic parameters are determined by given methods.%陀螺仪的误差模型与标定对于陀螺仪误差补偿非常关键.本论文针对陀螺仪的误差,分别建立了静态一阶与二阶简化模型以及随机误差模型,通过采用最小二乘法与Allan方差分析法进行了参数标定.最后,通过MEMS陀螺的实验结果获得了陀螺的特性参数,验证了模型及标定方法的有效性.【期刊名称】《电子设计工程》【年(卷),期】2017(025)017【总页数】4页(P164-167)【关键词】陀螺仪;误差模型;最小二乘法;Allan方差【作者】李勋;张欣;孙朔冬;鲍其莲【作者单位】深圳供电局有限公司广东深圳 518048;深圳供电局有限公司广东深圳 518048;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TN967.2微惯性器件是MEMS发展的重点,如硅微加速度计、硅微陀螺仪和硅微惯性测量组合等,硅微惯性器件相较于传统陀螺,具有轻便易于安装、使用寿命长、可靠性高、耐冲击、易于批量生产等特点,在汽车、无人机、等导航系统中具有广泛应用。
惯性导航与卫星导航组合定位精度分析及仿真周俊;王琳;徐永强;黄海;李枭楠【摘要】随着导航领域的逐渐发展,卫星导航的应用成为重要课题.阐述了惯性导航、卫星导航及其组合导航系统的基本原理和优缺点,对惯性导航系统的定位精度进行分析及仿真验证,并给出分析和验证的过程及结果.对惯性导航与卫星导航松组合模式的定位精度进行了分析和测试,并给出所使用的Kalman滤波器的详细参数及测试结果.测试结果表明,组合后的定位精度比单INS定位精度有大幅提高,且误差不随时间发散.【期刊名称】《无线电工程》【年(卷),期】2018(048)012【总页数】5页(P1086-1090)【关键词】卫星导航;惯性导航;组合导航;Kalman滤波【作者】周俊;王琳;徐永强;黄海;李枭楠【作者单位】陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TP30 引言惯性导航系统(INS)是依据牛顿惯性原理,利用陀螺、加速度计等惯性敏感元件及初始信息来计算载体的姿态、速度和位置[1-2]。
惯性导航完全依靠载体自身设备独立自主地进行导航,是一种保密性好且不易受干扰的导航系统[3-4]。
但由于惯性器件存在测量误差,这种误差进入导航解算时会随时间累积,导致导航结果的误差随时间发散[5]。
全球卫星导航系统(GNSS)是一种星基无线电导航系统,能为全球陆、海、空、天的各类军民载体提供全天候、全天时和高精度的三维位置、速度和精密时间信息[6-8]。
但由于用户接收机在接收其导航定位信号时容易受到遮挡、折射和高动态等因素的干扰,导致信号质量不稳定,进而影响定位精度,甚至失锁[9-10]。
而INS与GNSS的组合能够有效地解决惯导误差随时间发散的问题,同时可以增强GNSS接收机对信号的捕获与跟踪性能,提高导航系统的稳定性[11-13]。
学习指南《惯性导航系统》课程包括惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理等5个单元的内容。
由于本门课程具有:涉及知识面宽,与物理学、工程力学、控制科学、材料学、计算机科学等知识联系紧密;教学内容丰富,数学公式复杂,空间关系抽象,逻辑推理和形象思维要求高的课程特点,导致课程在教学过程易于出现教师难教、学生难学的现象。
为帮助大家学好本门课程,我们给出学习建议,供大家参考。
一、课程前后关系1.前置课程本门课程是电气工程及其自动化和自动化等专业的专业基础课,根据专业人才培养方案和课程自身的知识体系结构,学习本门课程需要具备《物理学》、《理论力学》、《电机学》、《电路原理》、《模拟数字电路》、《自动控制原理》和《陀螺原理》等相关课程的专门知识,这些知识是学好本门课程的重要基础。
2.后续课程本门课程的后续课程主要有《飞行控制系统》、《组合导航系统》、《机载航电设备》等。
学好本门课程可以为上述课程的学习打下良好的学习基础。
二、主讲教材与参考教材1.主讲教材本门课程的主讲教材是2008年9月国防工业出版社出版的空军航空机务体系统编教材《惯性导航》。
该教材从惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理五个知识模块,系统阐述了惯性导航基本概念、基本原理和基本结构。
教材针对惯性导航理论抽象、复杂的特点,特别加强了空间概念、坐标系转换和惯导几何位置关系的物理解释,惯性导航方程、力学编排方程、误差方程、对准方程等复杂公式推导过程的物理本质分析,以便于读者加深对惯性导航内涵和实质的理解。
2.参考教材本门课程为广大读者提供了大量辅助参考资料,参考资料包括参考教材、学位论文、学术论文三个类别。
这些参考资料有助于读者全面了解惯性导航及相关领域的知识结构,惯性导航理论和技术的发展方向。
以下给出的是主要参考教材清单。
(1)《惯性导航与组合导航》,张宗麟,北京,航空工业出版社,2000年8月(2)《惯性导航》,秦永元,北京,科学出版社,2006年5月(3)《捷联惯性导航技术》(英)David H.Titterton,北京,国防工业出版社,2007年12月(4)《惯性器件与惯性导航系统》,邓志红,北京,科学出版社2012年6 月(5)《光纤陀螺仪》,(法)Hrtve G. Lefevre,北京,国防工沛出版社,2002年1月(6)《陀螺原理》,许江宁,北京,国防工业出版社,2005年1月(7)《无陀螺捷联式惯性导航系统》,史震,哈尔滨,哈尔滨工程大学出版社,2007年8月(8)《惯性导航与组合导航基础》,刘智平,北京,国防工业出版社,2013年6月(9)《惯性技术》,邓正隆,哈尔滨,哈尔滨工业大学出版社,2006年2月(10)《惯性仪器测试与数据分析》,严恭敏,北京,国防工业出版社,2012年11月三、课程知识要点与学习方法(一)课程知识要点本门课程的惯性导航基础、惯性元件、惯性平台原理、平台式惯导原理和捷联式惯导原理5个知识模块,按照:惯性导航的基本思想是加速度的积分推算→惯性元件的作用是载体基本运动参数(线运动参数和角运动参数)的测量→惯性平台的作用是保障载体加速度的精确测量并隔离载体运动对惯性元件的影响→平台式惯性导航的原理涵盖导航方程建立、力学关系编排、导航参数解算、导航误差分析、初始导航基准建立→捷联式惯性导航的原理涵盖数学平台作用、导航位置与姿态方程建立、力学关系编排、导航参数解算、导航误差分析、初始导航基准建立的逻辑关系,构成惯性导航理论的知识体系。
水下平台惯导惯性器件误差高精度估计算法夏卫星;杨晓东【摘要】为满足高精度导航及隐蔽性要求,基于方位旋转技术,给出了针对水下平台惯导系统惯性器件(inertial measurement unit,IMU)误差无阻尼估计算法.首先分析了状态转换对固定指北式平台惯导系统的影响;其次利用Laplace变换,求解了方位旋转式平台惯导系统误差;然后基于舒拉振荡和平台旋转周期,利用间断获得的外测信息建立系统短时速度、位置误差模型并作不确定度评估;最后采用Kalman滤波对惯性器件误差作了事后估计.仿真结果表明,建立的速度、位置误差模型可信度高,算法可准确估计出东、北向陀螺常值漂移以及加速度计零位偏置,有效抑制导航误差发散,提高导航精度.【期刊名称】《系统工程与电子技术》【年(卷),期】2013(035)010【总页数】10页(P2176-2185)【关键词】惯性器件误差估计;方位旋转;Kalman滤波;速度、位置误差模型;舒拉振荡;旋转周期【作者】夏卫星;杨晓东【作者单位】海军潜艇学院训练大队,山东青岛266042;海军潜艇学院航海观通系,山东青岛266042【正文语种】中文【中图分类】U666.10 引言固定指北式平台惯导系统惯性器件(inertial measurement unit,IMU)误差包括陀螺漂移、加速度计零位偏置等,导航误差随时间不断积累,必须估计并补偿惯性器件误差。
目前,常用的估计方法为基于Kalman滤波的组合导航[1-3]。
文献[4-12]均利用有效外测信息,基于组合导航提高了平台惯导系统导航精度。
分析表明,此方案需长时间实时、连续获得外界信息,在水面舰艇等易于获取外界信息的载体上较容易实现。
然而,对水下运载器这一执行特殊任务的特殊载体而言,长时间连续获得外界信息这一要求无法保证其隐蔽性,基于Kalman滤波的组合导航在水下平台惯导方面适用性不强,同时文献[13]基于奇异值分解给出平台惯导系统各状态的可观测度,得出加速度计零偏和东向陀螺漂移不可观测的结论。