惯性器件原理-第十一章 测试与标定资料
- 格式:ppt
- 大小:1.68 MB
- 文档页数:22
一、实验目的1. 了解惯性的概念和特点。
2. 通过实验验证惯性的存在和表现。
3. 掌握惯性实验的基本方法和步骤。
4. 培养学生的动手操作能力和观察能力。
二、实验仪器1. 小车一辆2. 水平桌面一块3. 测量尺一把4. 秒表一个5. 纸张若干6. 粘土适量三、实验步骤1. 准备实验器材:将小车、水平桌面、测量尺、秒表、纸张和粘土准备好。
2. 将小车放置在水平桌面上,确保小车平稳。
3. 使用测量尺测量小车前进的距离,记录下来。
4. 使用秒表记录小车前进的时间,记录下来。
5. 在小车的尾部放置一块粘土,模拟增加小车的质量。
6. 重复步骤3和步骤4,记录小车前进的距离和时间。
7. 比较增加质量前后小车前进的距离和时间,分析惯性的影响。
8. 将实验结果整理成表格,并进行数据处理。
9. 根据实验结果,分析惯性的特点和表现。
四、实验结论1. 实验结果表明,小车在增加质量后,前进的距离和时间发生了变化。
2. 增加质量后,小车前进的距离变短,时间变长。
3. 这说明惯性的存在,质量越大,惯性越大。
4. 惯性是物体保持原有运动状态的性质,与物体的质量有关。
五、反思体会1. 本次实验让我对惯性的概念有了更深入的了解。
2. 通过实验,我学会了如何进行惯性实验,掌握了实验的基本方法和步骤。
3. 在实验过程中,我注意到了实验数据的准确性,培养了严谨的科学态度。
4. 通过观察和分析实验结果,我认识到惯性的特点和表现。
5. 在今后的学习和生活中,我会运用惯性知识,解决实际问题。
六、实验拓展1. 探究不同质量的小车在相同条件下,前进的距离和时间的变化。
2. 研究惯性与速度、加速度之间的关系。
3. 利用惯性原理,设计简单的惯性玩具。
4. 将惯性知识应用于实际生产生活中,提高生产效率。
5. 深入研究惯性的相关理论,为我国物理学的发展贡献力量。
总结:本次惯性试验实验让我对惯性的概念和特点有了更深入的了解,提高了我的动手操作能力和观察能力。
惯性器件测试与建模课程设计1. 前言惯性器件作为刚性连接系统中不可或缺的一部分,具有重要的作用。
它们被广泛应用于汽车、飞机、船舶等各种类型的交通工具中,以及工业自动化等领域。
惯性器件的测试和建模在这些应用领域中也变得越来越重要。
本文将介绍一份有关惯性器件测试与建模的课程设计,涵盖了测试理论、实验原理、测试器具、数据分析和建模。
2. 测试理论在惯性器件测试中,我们需要了解各种惯性器件的工作原理和测试方法。
这其中涉及到很多的基础理论知识,包括牛顿力学、旋转力学、惯性力学等。
以下是一些需要掌握的基础理论知识:•角度和角速度的概念•旋转坐标系和相对运动的概念•惯性张量和它的应用•转动动能、角动量和角动量守恒•惯性制动器工作原理和应用3. 实验原理为了实现对惯性器件的测试和建模,我们需要使用测试仪器和设备。
以下是一些与惯性器件测试相关的常见仪器和设备:•陀螺仪:用于测量角速度和角度•惯性测量单元(IMU):用于测量角速度、角度和加速度•多功能测试仪:用于测试多种机械性能指标,如转速、力矩等。
在实验中,我们需要在系统中加入不同的负载和控制参数,并测量相应的性能指标。
通过对实验数据的分析和处理,我们可以得到惯性器件的性能曲线以及相应的建模参数。
4. 测试器具为了进行惯性器件的测试和建模,我们需要使用一些特定的测试器具。
这些器具需要满足以下要求:•具有高精度的测量能力•具有良好的稳定性和可靠性•能够支持多种不同类型的测试以下是一些常用惯性器件测试器具:•惯量测试仪•陀螺仪测量设备•惯性导航系统5. 数据分析和建模通过实验收集到的数据,我们需要进行进一步的分析和处理,以获得惯性器件的性能曲线和建模参数。
以下是一些常用的数据分析和建模方法:•数据滤波和处理•最小二乘法求解模型参数•基于机器学习的数据挖掘和分析在获得了惯性器件的性能曲线和建模参数之后,我们可以将其用于模拟和优化系统性能,并用于系统设计和控制中。
6. 总结惯性器件测试和建模是一个非常重要的研究领域。
一、实验目的1. 理解惯性原理的基本概念。
2. 通过实验观察惯性现象,加深对惯性原理的理解。
3. 掌握简单的实验操作技能,提高动手能力。
二、实验原理惯性原理是物理学中的一个基本原理,即物体在没有外力作用的情况下,将保持静止状态或匀速直线运动状态。
本实验通过演示不同情境下的惯性现象,验证惯性原理的正确性。
三、实验器材1. 实验台2. 小车3. 驱动电源4. 光电门5. 计时器6. 测量尺7. 记录本四、实验步骤1. 准备实验器材,确保实验台稳固,小车放置在实验台上。
2. 连接驱动电源,将小车与光电门连接。
3. 打开计时器,启动小车。
4. 观察小车在光电门处通过的时间,记录数据。
5. 重复步骤3-4,进行多次实验,求平均值。
6. 将小车放在实验台上,保持静止状态。
7. 打开计时器,启动小车,观察小车从静止状态开始运动的时间,记录数据。
8. 重复步骤6-7,进行多次实验,求平均值。
9. 将小车放在实验台上,给予一定的初速度,使其沿直线运动。
10. 观察小车在光电门处通过的时间,记录数据。
11. 重复步骤9-10,进行多次实验,求平均值。
五、实验结果与分析1. 小车在光电门处通过的时间记录如下:实验次数 | 通过时间(秒)--------|------------1 | 0.52 | 0.43 | 0.6平均时间 | 0.52. 小车从静止状态开始运动的时间记录如下:实验次数 | 开始运动时间(秒)--------|----------------1 | 0.22 | 0.13 | 0.3平均时间 | 0.23. 小车沿直线运动时通过光电门的时间记录如下:实验次数 | 通过时间(秒)--------|------------1 | 0.72 | 0.63 | 0.8平均时间 | 0.7根据实验结果,可以得出以下结论:1. 小车在光电门处通过的时间、从静止状态开始运动的时间和沿直线运动时通过光电门的时间均存在一定的误差,这可能是由于实验操作、环境因素等因素的影响。
惯组标定原理
惯组标定是一种为惯性测量单元(例如加速度计和陀螺仪)提供准确测量结果的过程。
惯组标定原理基于以下假设:
1. 惯性测量单元的输出与外部物理参数之间存在线性关系。
2. 惯性测量单元的输出受到零飘(bias)和比例误差(scale factor error)的影响。
根据以上假设,惯组标定过程通常包括以下步骤:
1. 零飘校准:将惯性测量单元放置在静止状态下,并记录其输出值。
通过对这些输出值求平均,可以确定零飘误差的修正值,以便将其从实际测量中消除。
2. 比例误差校准:将惯性测量单元暴露在已知加速度或角速度水平下,并记录其输出值。
通过将实际加速度或角速度与测量输出值进行比较,可以确定比例误差的修正值。
3. 温度校准:许多惯性测量单元的性能会随着温度的变化而发生变化。
因此,在标定过程中,还需要考虑温度对测量结果的影响。
这可以通过将惯性测量单元暴露在不同温度下,并记录其输出值来实现。
以上步骤通常由专用的标定设备或系统完成。
通过对惯性测量单元进行准确的标定,可以提高其测量精度和可靠性,从而提高整个系统的性能。
惯性器件与系统测试技术实验教学大纲一、实验基本信息课程编号:201404116中文名称:惯性器件与系统测试技术英文名称:Inertial sensors and system testing课程性质:专业核心课程面向专业:测控技术与仪器开设学期:6课程总学时:40实验学时:8是否独立设课:否二、实验目的和任务目标1:通过具体的实践测量和相关实验,能达到理论联系实际、提高动手能力和应用技能,培养观察问题、分析问题及独立思考的能力,能够就复杂工程问题撰写报告和设计文稿,与业界同行及社会公众进行有效沟通和交流。
(对应指标点10-1)通过本课程的学习,使学生掌握惯性器件及系统的测试原理、测试方法,了解测试设备,具备数据分析及处理能力,培养学生对惯性器件及系统的分析能力、研究能力、测试能力、工程技术能力。
三、实验教学基本要求1、熟悉惯性器件及系统测试设备的基本原理,掌握惯性器件及系统测试方法,具备数据分析及误差处理能力;培养学生具备对惯性器件及系统的工程设计、测试、分析、研究等的科学素质;能够解决工程实际问题。
(对应目标1)四、试验教学内容、基本要求与学时分配(实验项目基本情况)五、实验教材(指导书)或网络资源[1]自编试验指导说明[2]惯导仪器测试与数据分析[M].国防工业出版社,2012.[3]姜复兴.惯导测试设备原理与应用[M].哈尔滨工业大学出版社,1998.[4]张天光译.捷联式惯性导航技术(第2版)[M].国防工业出版社,2010.六、考核方式实验部分占课程总成绩的20%,共20分。
考核主要包括三个部分:预习情况、实验操作情况、实验报告情况,各占总体的20%、20%、60%。
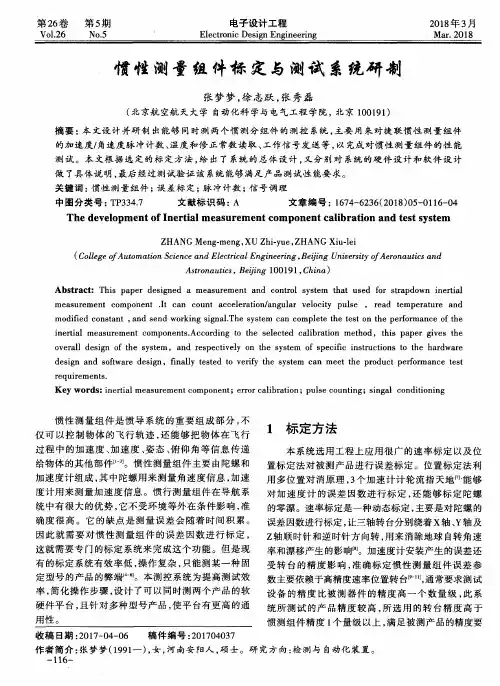
惯性测量单元安装误差系数标定实验二零一三年六月十日2.1 惯性测量单元安装误差系数标定试验一、实验目的1、掌握惯性测量单元(inertial measurement unit ,IMU )的标度系数、安装误差、零偏的标定方法;2、利用现有实验条件实现实验过程的设计。
二、实验内容利用单轴速率转台,进行IMU 的安装误差系数标定,并通过公式计算该安装误差系数。
三、实验系统组成单轴速率位置转台、MEMS 惯性测量单元、稳压电源、数据采集系统。
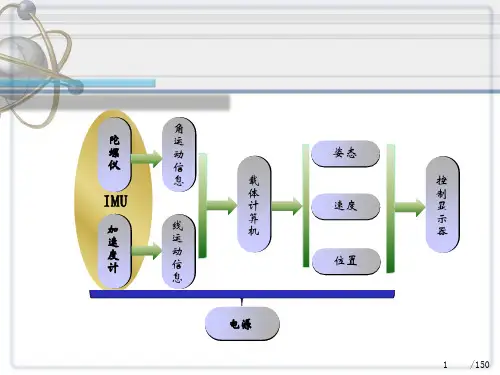
四、实验原理IMU 安装误差系数的计算方法通常,惯导系统至少需要三个陀螺和三个加速度计,用以感知载体的三轴角速度和加速度变化。
将这些陀螺和加计按照敏感轴两两正交的方式集成在一起,安装在一个结构框架上,便构成了一个能感知完整惯性测量信息的小型系统,称之为惯性测量单元。
对惯性测量单元进行标定时,除了要对其中的陀螺、加速度计进行常规标定外,还要考虑由于安装时不能严格保证敏感轴两两正交所带来的交叉耦合误差,即,要对IMU 的安装误差进行标定,测量出不正交角。
因此,在考虑IMU 的安装误差、标度因数误差、零偏误差的情况下,建立东北天坐标系下IMU 的角速度通道误差方程。
x x xx xy xz x y y yx yy yz y z z zxzyzz z K E E E K E E E K ωεωωεωωεω⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ (1)式中i ω为惯性系统i 轴向陀螺输出角速度,i ω为i 轴向的输入角速度;i ε为i 轴向陀螺零偏;ii K 为i 轴向陀螺标度因数;ij E 为角速度通道的安装误差系数,i和j为坐标轴X,Y,Z的统称。
设输入矩阵为x1xny1ynIz1zn...11ωωωωωω⎡⎤⎢⎥⎢⎥Ω=⎢⎥⎢⎥⎣⎦,输出矩阵为x1xno y1ynz1zn...ωωωωωω⎡⎤⎢⎥Ω=⎢⎥⎢⎥⎣⎦,则标度因数、安装误差系数与陀螺漂移组成的矩阵可按最小二乘法估计为:类似,可计算加速度计的标度因数、安装误差系数与加计零偏。
惯组标定原理
惯组标定原理是指通过对惯性组件的测量和校准,确定其输出信号与物理量之间的准确关系。
惯性组件通常包括加速度计和陀螺仪,用于测量物体的加速度和角速度。
惯组标定的原理可以分为以下几个步骤:
1. 建立坐标系:首先需要确定一个适当的坐标系,用于描述物体的运动状态。
坐标系的选择取决于具体的应用场景。
2. 测量数据采集:通过将惯性组件安装在被测物体上,记录其输出信号随时间的变化。
这可以通过数据采集系统进行实时采集,或者通过记录仪等设备进行离线记录。
3. 数据处理:将采集到的数据进行处理,包括滤波、降噪、数据对齐等步骤,以获得准确的测量结果。
4. 校准模型建立:根据已知的标准测量数据,建立与输出信号之间的数学模型。
这可以通过回归分析、最小二乘法等统计方法进行。
5. 参数估计:利用建立的数学模型,对惯性组件的参数进行估计。
这可以通过最大似然估计、最小二乘法等方法进行。
6. 校准验证:通过将已经标定的惯性组件与标准测量设备进行比较,验证其准确性和可靠性。
惯组标定的目的是提高惯性组件的测量精度和准确性,以确保其在实际应用中的可靠性。
标定结果可以用于修正惯性组件的输出信号,使其更加符合实际物理量的变化规律。