组合导航系统新息自适应卡尔曼滤波算法_卞鸿巍
- 格式:pdf
- 大小:892.89 KB
- 文档页数:5
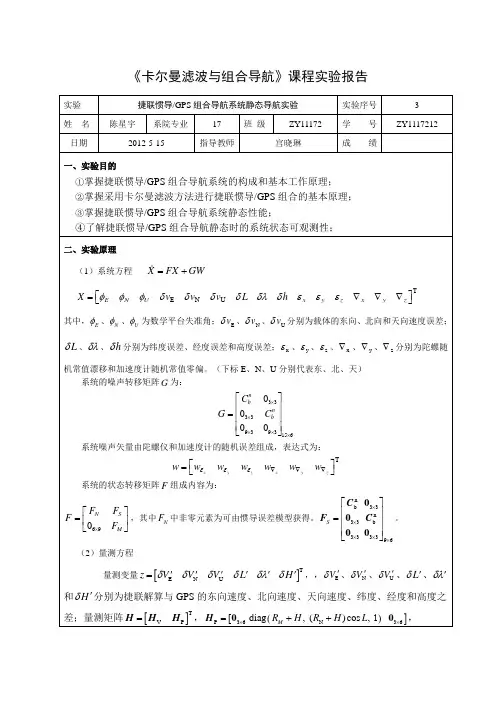
《卡尔曼滤波与组合导航》课程实验报告实验捷联惯导 /GPS 组合导航系统静态导航实验实验序号 3姓名陈星宇系院专业17班级 ZY11172 学 号 ZY1117212日期2012-5-15指导教师宫晓琳成绩一、实验目的① 掌握捷联惯导 /GPS 组合导航系统的构成和基本工作原理; ② 掌握采用卡尔曼滤波方法进行捷联惯导/GPS 组合的基本原理;③ 掌握捷联惯导 /GPS 组合导航系统静态性能;④了解捷联惯导 /GPS 组合导航静态时的系统状态可观测性;二、实验原理( 1)系统方程 X FX GWXTE NUvEvNvULhx y z x y z其中, E 、 N 、 U 为数学平台失准角;v E 、 v N 、 v U 分别为载体的东向、北向和天向速度误差;L 、 、 h 分别为纬度误差、经度误差和高度误差;x 、 y 、 z、x、y、z 分别为陀螺随机常值漂移和加速度计随机常值零偏。
(下标E 、 N 、 U 分别代表东、北、天)系统的噪声转移矩阵G 为:C b n03 3G03 3C b n9 39 315 6系统噪声矢量由陀螺仪和加速度计的随机误差组成,表达式为:wwwww wTzwxyxyz系统的状态转移矩阵F 组成内容为:F NF SC b n3 3 ,其中 F N 中非零元素为可由惯导误差模型获得。
F S03 3 C b n 。
F069FM03 3 03 39 6( 2)量测方程量测变量 zV E V NV ULT,,V 、V 、V 、L 、HENU和 H 分别为捷联解算与 GPS 的东向速度、北向速度、天向速度、纬度、经度和高度之差;量测矩阵 H H V H P T03 6 diag R M H , (R N H )cos L,036 ,, H PV 3 3diag 1, 1, 1 0 3 9 ,v v V E v V N v V U v v T H v为量测噪声。
量测噪声方0L H差阵 R 根据GPS的位置、速度噪声水平选取。
一种车载组合导航系统的联邦滤波新算法
张红梅;刘胜;张晓宇
【期刊名称】《中国惯性技术学报》
【年(卷),期】2006(014)006
【摘要】针对车载GPS/DR组合导航系统的特点,提出了一种新的联邦滤波算法.子滤波器由两个滤波器构成:一个是卡尔曼滤波器,另一个是Unscented卡尔曼滤波器(UKF),它们分别处理GPS子系统和DR子系统的信息.UKF是一种较新的非线性滤波方法,相对传统的非线性滤波器EKF具有更高的滤波精度和更高的计算效率.联邦滤波器的信息分配因子采用一种基于观测误差的最小均方误差形式,最佳地融合了传感器的输出信息.这种结构降低了联邦滤波器的计算难度和计算量,提高了组合导航系统的可靠性和容错性.仿真结果表明,提出算法的定位精度很高,与UKF算法的效果相当.
【总页数】4页(P30-33)
【作者】张红梅;刘胜;张晓宇
【作者单位】哈尔滨工程大学,自动化学院,哈尔滨,150001;哈尔滨工程大学,自动化学院,哈尔滨,150001;哈尔滨工程大学,自动化学院,哈尔滨,150001
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.一种改进的低成本车载MIMU/GPS组合导航系统算法 [J], 阮晓明;程咏梅;程承;潘泉
2.联邦滤波车载组合导航系统算法改进研究 [J], 杨鹏翔;秦永元;舒东亮
3.一种新的粒子滤波算法在INS/GPS组合导航系统中的应用 [J], 向礼;刘雨;苏宝库
4.一种新的低成本组合导航系统初始对准算法 [J], 岳晓奎;袁建平
5.一种容错联邦滤波算法在INS/GPS/Doppler组合导航系统中的应用 [J], 张崇猛;庄良杰;陈超英;刘飞
因版权原因,仅展示原文概要,查看原文内容请购买。

第37卷 第2期2009年3月 河南师范大学学报(自然科学版)J ournal of Henan N ormal Universit y(N atural Science)V ol.37 N o.2M ar.2009 文章编号:1000-2367(2009)02-0067-03车载GPS/DR组合导航系统卡尔曼滤波方法的改进高金辉,汪晓晨,贾利锋(河南师范大学物理与信息工程学院,河南新乡453007)摘 要:将全球定位系统(GPS)和航位推算法(DR)两种定位方式结合,实现车辆GPS/DR组合定位系统的自适应信息融合.联合卡尔曼滤波器存在数学模型不确定性和误差模型的随机性的缺点,提出改进方法是采用联邦滤波器,并引入利用模糊推理建立的模糊自适应联邦滤波器,提高了系统的精度和功能.关键词:信息融合;GPS/DR组合导航;自适应联邦滤波器中图分类号:U666.1 文献标识码:A车辆导航中,由于GPS能为用户提供全天候、连续实时的高精度位置、速度和时间信息,因此得到了广泛的应用.但是GPS的缺点是易产生失锁现象,卫星信号受阻挡后会出现中断.DR系统是自主导航系统,不受周围环境的影响,能提供连续的导航,但是DR的缺点是定位误差随时间不断积累,长时间单独使用定位精度达不到要求.因此建立GPS/DR组合导航系统,当卫星信号正常接收时,利用GPS接收定位信息,DR 修正信息;当信号阻挡时,利用DR自主导航和短时间定位精度高的特点,来确定定位信息.1 GPS/DR组合导航系统联邦卡尔曼滤波器车载GPS/DR组合导航系统中,如何将两种数据进行融合,是决定导航定位精度的关键问题.采用联邦Kalman滤波器(Federated Kalman filter)融合方法是当前应用最多的多传感器数据融合方法之一.联邦卡尔曼滤波器利用信息分配原理(β1+β2=1),可实现多传感器信息的最优融合,其结构见图1.它是由两个子滤波器(GPS KF、DR KF)和一个主滤波器分别两次进行数据处理,它利用了信息分配原理,按信息分配系数β1,β2将主滤波器的输出(状态估计值^X g和估计误差协方差矩阵P g)在子滤波器间进行分配[1-2];子滤波器通过传感器采集的信息,通过接收机接收各自的观测信息,结合主滤波器反馈的滤波器输出的分配信息,送到局部滤波器中进行局部估计,其结果再送入主滤波器进行信息融合,进行全局最优估计.F KF方法具有运算效率高、适用范围广等优点,但是该方法要求准确建立系统数学模型.由于GPS信号易受外界环境影响,且DR系统的航向传感器容易受到电磁波干扰,因此GPS/DR系统的数学模型是随机变化的,不能准确建立数学模型.F KF方法容易造成滤波发散.因此,F KF方法不适合直接应用于GPS/ DR系统中.我们提出的改进方法是建立GPS/DR组合导航系统自适应联邦卡尔曼滤波器,具体分析如下.收稿日期:2008-07-08基金项目:河南省教育厅基金项目(2009A510006)作者简介:高金辉(1962-),男,河南方城人,河南师范大学副教授,研究方向:仪器仪表测量.2 GPS/DR组合导航系统自适应联邦卡尔曼滤波器GPS/DR 组合导航系统联邦卡尔曼滤波器中,考虑到机动加速度均值和方差的自适应算法,组成GPS/DR 组合自适应联邦卡尔曼滤波器.该滤波器由两个子滤波器和一个主滤波器组成,子滤波器独立地进行时间更新和测量更新;主滤波器的功能在于进行时间更新,以及将两个滤波器的结果进行融合以得到全局最优估计.可通过选择不同的信息分配系数来改变滤波器的性能.利用GPS 接收机输出的反映定位精度的参数(PDO P )为依据,自动调整β1,β2的大小[3-4].具体结构图如图2所示.GPS -O EM 接收机中,一般情况下,定位精度由p (PDO P )反映,可根据其p 的大小决定β的取值.β1,β2的自适应算法为:β1=0.99(p Φ2)2p(2<p Φ5)1p (5<p Φ10)12p(p >10),β2=1-β1[4]. 自适应联邦Kalman 滤波器虽然能够自动调整信息的分配,但是系统噪声和观测噪声的统计数据不易得到,这样容易造成滤波器发散或精度下降,为此引入模糊自适应联邦卡尔曼滤波器,模糊逻辑自适应控制器FL AC 可以评估联邦卡尔曼滤波器在任何时候的性能,并且利用合适的调整值来改善滤波器的性能.3 GPS/DR 组合导航系统模糊自适应联邦卡尔曼滤波器由于自适应联邦Kalman 滤波器没有可靠的噪声方差信息,导致残差不是理想的白噪声.我们改进的方法是加入模糊控制理论.本文中是将模糊逻辑自适应控制器(FLAC )和卡尔曼滤波器组合为模糊自适应联邦卡尔曼滤波器,其结构图如图3所示.卡尔曼滤波器中的残差的方差和均值做为判断滤波器性能好坏的评价因数.选择残差的方差和均值为模糊规则的两个输入,残差的线性组合是模糊规则的输出,也是系统噪声调整值和观测噪声调整值,对残差方差和均值进行模糊化后,根据卡尔曼滤波器的性质判断模糊自适应系统的输出,通过采样每一个样本点的数据来监控残差,并得到其方差和均值.4 总 结在车辆GPS/DR 组合导航系统中,联邦卡尔曼滤波方法的缺陷导致不能直接应用到GPS/DR 系统中,我们提出的改进方法是自适应联邦卡尔曼滤波法,并介绍了运用模糊推理建立的模糊自适应联邦卡尔曼滤波器,根据模糊推理规则来控制自适应联邦Kalman 的估计误差方差,该方法使系统的精度和性能获得86河南师范大学学报(自然科学版) 2009年增强.参 考 文 献[1] 潘 泉,杨 峰,叶 亮,等.一类非线性滤波器-U KF 综述[J ].控制与决策,2005,5:481-494.[2] 朱 虹,关 永,关桂霞,等.基于U KF 的车辆组合定位[J ].微计算机信息,2007,23(12):228-230.[3] 卢海曦,周百令.自适应联邦滤波器在组合导航系统中的应用[J ].2007,12(6):678-681.[4] 于德新,杨兆升,刘雪杰.基于卡尔曼滤波的GPS/DR 导航信息融合方法[J ].交通运输工程学报,2006,6(2):65-69.[5] 李磊磊,陈家斌,谢 玲,等.粒子滤波方法在GPS/DR 组合导航系统中的应用[J ].微电子学与计算机,2004,21(10):97-99.[6] 唐 磊,赵春霞,唐振民,等.基于模糊自适应Kalman 滤波的GPS/DR 数据融合[J ].控制理论与应用,2007,24(6):891-894.[7] 彭 飞,柳重堪,张其善.基于模糊逻辑的GPS/DR 组合导航系统地图匹配算法[J ].遥测遥控,2000,22(1):32-36.The Improvement on K alman Filter Method for V ehicleGPS/D R Integrated N avigation SystemGAO Jin 2hui ,WAN G Xiao 2chen ,J IA Li 2feng(College of Physics and Information Engineering ,Henan Normal University ,Xinxiang 453007,China )Abstract :Integrating the two position methods :global positioning system and dead reckoning ,the data fusion method is set up for Vehicle GPS/DR Integrated Navigation System.Federated Kalman filter has several flaws in mathematical models uncertainty and error models randomicity ,The improvement method uses an adaptive federated Kalman filter ,drawing in a Fuzzy logic to set up a f uzzy adaptive federated kalman filter ,sum up EKF ,U KF ,PF the three nonlinearity filter on principle of work ,the advantages and disadvantages and applicable scope.K ey w ords :data f usion ;GPS/DR Integrated Navigation System ;adaptive federated kalman filter(上接第66页)[4] 牛有田,郝好贞,陈建峰,等.罗兰-C 天波传播时延的稳定性与空间相关性[J ].河南师范大学学报(自然科学版),2008,36(4):54-56.[5] 沃特A. D.[美].甚低频无线电工程[M ].北京:国防工业出版社,1973.[6] 牛有田,田育庶.罗兰-C 天波传播时延的间接法精确测量[J ].电波科学学报,1994,9(2):36-44.[7] 田育庶,牛有田.低频天波传播预测与低电离层模式参数的测定[J ].电波科学学报,2002,17(1):29-34.[8] NASA.Total Solar Eclipse of 1997March 9[Z].NASA RP 1369,http :///eclipse/970309/text/maps.ht ml ,2008-02-08.Observation and Analysis of Total Solar Eclipse of 1997March 9Using V LF SignalN IU Y ou 2tian ,C H EN Jian 2feng ,HAO Hao 2zhen ,WAN G Hai 2bo ,ZHAN G Zhong 2yuan(College of Physics and Information Engineering ,Henan Normal University ,Xinxiang 453007,China )Abstract :The observation on Alpha VL F signal at 1997March 9in Xinxiang city Henan province has found that the in 2fluence of total solar eclip se on the VL F propagation characteristic is great.The total solar eclip se has brought the VL F phase to delay obviously.The mechanism of the influence of total solar eclipse on the propagation of VL F signal is discussed.The calculations using waveguide mode theory show :when the VL F propagation path goes through the main total solar eclip se path ,the maximum decrease value of the VL F phase velocity is about f rom 0.101%to 0.118%;when the VL F propagation path goes through the 80%solar eclipse path ,it is about f rom 0.064%to 0.082%.K ey w ords :total solar eclipse ;VL F ;effective reflection height ;phase velocity 96第2期 高金辉等:车载GPS/DR 组合导航系统卡尔曼滤波方法的改进。
一种基于卡尔曼滤波的DR/LMS组合导航定位算法变电站/机器人/卡尔曼滤波1 引言随着国家十二五规划纲要关于建设智能坚强电网要求的提出,智能电网信息化、数字化、网络化已经成为当前电网智能化发展的一个热点研究领域。
目前,承载着电网输变电环节的变电站,多采用人工巡检方式监控变电设备的运行状态,这一传统巡检方式费事费力。
因此,基于智能机器人的无人值班变电站巡检技术已然成为智能化变电站发展的一个创新性热点话题,而机器人实现自主巡检任务的关键及难点在于如何构建机器人自主导航定位系统。
目前,常用的导航系统多种多样,导航原理、定位精度及成本造价也存在较大差别。
常用的导航定位系统包括黑白线识别导航、磁导航、GPS/惯性组合导航、视觉图像导航、激光雷达/惯性组合导航等。
而较为成熟的机器人黑白线识别导航技术,通过激光对地面黑白线进行反射接收识别,保证机器人始终沿预设白线行走,该方法简单易行,但施工较大,且易受大雪天气影响;磁导航技术则利用磁传感与测量技术,通过在地面铺设磁条,保证机器人始终沿预设磁航道行走,该方法虽然解决了大雪天气遮挡黑白线的问题,但其成本较大,且变电站长期强磁干扰容易导致磁条失磁,降低其灵敏度,最终可能导致导航失效。
DGPS/惯性导航系统[1]定位精度可以到达亚米级,定位灵活方便,但GPS受天气、变电站强电磁干扰等外界环境因素影响较大,考虑系统的容错性,需要增加额外独立的导航子系统配合使用,而该系统成本造价高、经济性较差。
视觉图像导航定位系统借鉴人体视觉导航原理,利用图像识别及神经网络技术,通过机器人预先对巡检环境自主学习,建立基于当前环境模型下的知识库与规则库,即利用已有学习经验来实现自主巡检任务,但该方法技术难度较大,有待进一步深化研究。
本文提出的惯性/激光雷达组合导航定位技术,利用高精度激光雷达测距技术,在预设全局路径[2]的前提下,通过多点全向扫描测距、信息融合与滤波处理技术,对机器人当前运行环境进行视觉建模,同时利用多点测距技术实现实时定位,该方法成本低廉,定位精度高,但对现场环境的依赖性相对较大,易受外界随机干扰,需要优化程序算法,减小外界的随机干扰误差等。
组合导航系统中一种基于IMM-Kalman的数据融合方法田易;阎跃鹏;钟燕清;李继秀;孟真
【期刊名称】《哈尔滨工程大学学报》
【年(卷),期】2022(43)7
【摘要】针对INS/GNSS组合导航系统中对传感器随机零偏动态估计的需求,本文提出了一种基于IMM-Kalman的数据融合方法。
该算法基于IMM框架,通过模型概率更新,进行自适应系统模型选择,实现对传感器零偏的动态最优估计,提高组合导航系统数据融合精度。
仿真验证表明:与常规算法相比,改进算法可以实现对传感器随机零偏的动态估计,提高姿态解算精度,将俯仰角和滚转角误差由0.26°和0.23°分别降至0.11°和0.04°;同时仿真了卫星失锁的情况,改进算法的应用,使INS独立导航时位置累积误差仅为21.8 m,较常规方法的42.2 m减少了近50%,进一步证明了算法的有效性。
【总页数】6页(P973-978)
【作者】田易;阎跃鹏;钟燕清;李继秀;孟真
【作者单位】中国科学院微电子研究所;中国科学院大学
【正文语种】中文
【中图分类】V249.32
【相关文献】
1.组合导航系统中一种基于特征值分解的自适应信息融合滤波算法
2.WSN中一种基于数据融合的Mobile Agent路径规划方法
3.车载GPS/DR组合导航系统的数
据融合方法研究4.MIMU/GPS组合导航系统数据同步与融合方法研究5.GPS/DR 组合导航中一种新的数据融合算法
因版权原因,仅展示原文概要,查看原文内容请购买。

自适应联邦卡尔曼滤波在机器人组合导航系统中的应用研究吕建新;周翟和;伏家杰;张倩云【期刊名称】《测控技术》【年(卷),期】2017(036)006【摘要】利用里程计(OD)与全球定位系统(GPS)辅助捷联惯性导航系统(SINS)构成一种高可靠性的组合导航系统.推导并建立了局部滤波器的数学模型,并针对联邦滤波器在载体发生异常扰动时滤波精度较低的问题,设计了基于SINS/GPS/OD组合导航系统的自适应联邦滤波器,有效补偿了系统异常扰动或动力学模型误差.仿真模拟了机器人的全航线运行轨迹进行验证,仿真结果表明,SINS/GPS/OD组合导航系统的自适应联邦卡尔曼滤波算法与相同组合导航系统的非自适应联邦卡尔曼滤波算法相比,在保障机器人导航定位可靠性及容错能力的前提下,能有效抑制异常扰动的影响,导航精度得到进一步改善.【总页数】5页(P15-19)【作者】吕建新;周翟和;伏家杰;张倩云【作者单位】南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106【正文语种】中文【中图分类】TP11【相关文献】1.联邦卡尔曼滤波在水下航行器组合导航系统中的应用 [J], 王其;杨常松2.联邦卡尔曼滤波在SINS/GNSS/数字罗盘组合导航系统中的应用 [J], 张果3.联邦卡尔曼滤波器在容错性组合导航系统中的应用 [J], 李康伟;王宏力4.一种自适应联合卡尔曼滤波器及其在车载GPS/DR组合导航系统中的应用研究[J], 房建成;申功勋;万德钧5.联邦卡尔曼滤波技术在多卫星组合导航系统中的应用 [J], 吕洋; 邱磊; 王浩; 易大江因版权原因,仅展示原文概要,查看原文内容请购买。
组合导航系统中一种基于特征值分解的自适应信息融合滤波算
法
王宇飞;黄显林;胡恒章
【期刊名称】《航空学报》
【年(卷),期】2000(021)003
【摘要】基于分散滤波理论的联合滤波算法,可以有效地降低组合导航系统的计算负担,并且增强系统的容错性能.给出了一种联合滤波算法中信息分配系数的自适应计算方法,能够使联合系统根据导航过程中各传感器的信息质量的变化合理地反馈全局信息.仿真结果表明,该算法可以有效地降低由于导航子系统降级带来的滤波误差.
【总页数】3页(P274-276)
【作者】王宇飞;黄显林;胡恒章
【作者单位】哈尔滨工业大学,控制工程系,黑龙江,哈尔滨,150001;哈尔滨工业大学,控制工程系,黑龙江,哈尔滨,150001;哈尔滨工业大学,控制工程系,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】V249.32
【相关文献】
1.一种基于Q-R矩阵分解的自适应滤波算法 [J], 邢昌风;石章松
2.一种基于一阶扰动自适应特征值分解的多用户检测算法 [J], 薛强;杜志敏;吴伟陵
3.CDMA系统中两种基于子空间自适应特征值分解的多用户检测算法 [J], 薛强;吕旌阳;吴伟陵
4.一种基于特征值分解的自适应信息融合滤波算法 [J], 黄显林;王宇飞;胡恒章
5.一种SINS/GPS紧组合导航系统的改进自适应扩展卡尔曼滤波算法 [J], 孟秀云;王语嫣
因版权原因,仅展示原文概要,查看原文内容请购买。