3、高级电工技能培训讲义
- 格式:docx
- 大小:2.80 MB
- 文档页数:58


第一章传统B2012A龙门刨床工作原理介绍第一节龙门刨床的差不多结构及组成龙门刨床要紧用于对大型工件进行各种外部磨削,在大型机械加工厂中较常见。
B2012A龙门刨床在上世纪六十年代就在各地络续出现,它加工精度较高,工作稳定可靠,成为许多机械加工厂的必备设备。
它的体积庞大,3.2米的高度,近10米的长度,令一些中小企业望而却步。
进入二十一世纪以后,龙门刨床的一些性能已跟不上时代进展的需要。
首先它的精度满足不了新的需要,其次它的能耗大,噪音大,效率低。
各地用新技术加以改造的动议提上了日程。
其中较为成功的尝试确实是应用PLC 技术,PID技术和可控硅技术,取代了交磁扩大机,直流发电机和部分继电器、接触器,较大地节约了投资,显著地提高了工作精度和能源效率。
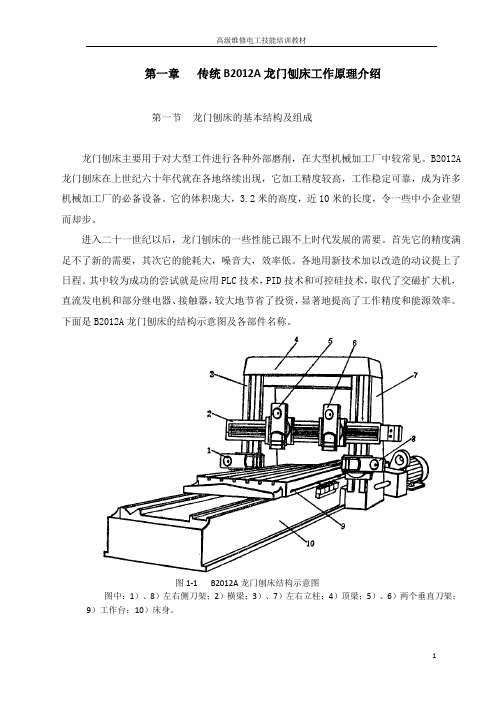
下面是B2012A龙门刨床的结构示意图及各部件名称。
图1-1 B2012A龙门刨床结构示意图图中:1)、8)左右侧刀架;2)横梁;3)、7)左右立柱;4)顶梁;5)、6)两个垂直刀架;9)工作台;10)床身。
第二节龙门刨床的交流机组电路B2012A龙门刨床的交流机组电路见附图1。
该电路在龙门刨床中的作用是:一、用于电力拖动。
图中,主电机M A、扩大机电机M B均为拖动电机。
其中M A功率60千瓦,采纳Y-Δ起动。
它采纳联轴方式拖动两台电机—直流发电机M G和直流励磁机M GE。
主电机起动后,意味着直流电源差不多建立,能够开始工作了。
M B功率为2千瓦,用于拖动扩大机,使扩大机正常工作。
二、用于实现对刀架进刀机构、横梁升降、横梁夹紧的操作。
由图中能够看出,三副刀架的拖动电机,横梁升降和横梁夹紧电机,差不多上独立操纵的。
第三节龙门刨床的直流主拖动操纵电路B2012A龙门刨床的直流主拖动操纵电路见附图2。
对该电路各部分的工作原理简述如下:一、直流主电路:通过拖动直流电机,实现对工作台的运行操作。
该电路位于直流主拖动操纵电路上方的中间部分。
他励直流发电机M G 的电枢部分,提供给它励直流电动机M驱动所需的工作电压,它的电压高低直接决定直流电动机的转速,电压的极性则决定直流电动机的转向。


第一章传统B2012A龙门刨床工作原理介绍第一节龙门刨床的基本结构及组成龙门刨床主要用于对大型工件进行各种外部磨削,在大型机械加工厂中较常见。
B2012A 龙门刨床在上世纪六十年代就在各地络续出现,它加工精度较高,工作稳定可靠,成为许多机械加工厂的必备设备。
它的体积庞大,3.2米的高度,近10米的长度,令一些中小企业望而却步。
进入二十一世纪以后,龙门刨床的一些性能已跟不上时代发展的需要。
首先它的精度满足不了新的需要,其次它的能耗大,噪音大,效率低。
各地用新技术加以改造的动议提上了日程。
其中较为成功的尝试就是应用PLC技术,PID技术和可控硅技术,取代了交磁扩大机,直流发电机和部分继电器、接触器,较大地节省了投资,显著地提高了工作精度和能源效率。
下面是B2012A龙门刨床的结构示意图及各部件名称。
图1-1B2012A龙门刨床结构示意图图中:1)、8)左右侧刀架;2)横梁;3)、7)左右立柱;4)顶梁;5)、6)两个垂直刀架;9)工作台;10)床身。
第二节龙门刨床的交流机组电路B2012A龙门刨床的交流机组电路见附图1。
该电路在龙门刨床中的作用是:一、用于电力拖动。
图中,主电机M A、扩大机电机M B均为拖动电机。
其中M A功率60千瓦,采用Y-Δ起动。
它采用联轴方式拖动两台电机—直流发电机M G和直流励磁机M GE。
主电机起动后,意味着直流电源已经建立,可以开始工作了。
M B功率为2千瓦,用于拖动扩大机,使扩大机正常工作。
二、用于实现对刀架进刀机构、横梁升降、横梁夹紧的操作。
由图中可以看出,三副刀架的拖动电机,横梁升降和横梁夹紧电机,都是独立控制的。
第三节龙门刨床的直流主拖动控制电路B2012A龙门刨床的直流主拖动控制电路见附图2。
对该电路各部分的工作原理简述如下:一、直流主电路:通过拖动直流电机,实现对工作台的运行操作。
该电路位于直流主拖动控制电路上方的中间部分。
他励直流发电机M G的电枢部分,提供给它励直流电动机M驱动所需的工作电压,它的电压高低直接决定直流电动机的转速,电压的极性则决定直流电动机的转向。
主电路具有过流保护FA1。
二、直流控制电路:通过继电器控制电路,实现对直流电机转速和转向的控制。
1、励磁发电机电路:(见附图2右侧电路。
)2、交磁扩大机电路:(见图1-2及附图2左侧电路。
)1) 交磁扩大机基本结构和工作原理:(见图1-2,图1-3。
)2) 交磁扩大机在本电路中的作用:(见附图2)。
改变加在OⅢ绕组的电压大小和极性,可改变直流发电机的励磁电压,达到改变输出电压大小甚至极性的目的。
用较小的控制电压和控制电流,通过扩大机,去控制较大的输出电压,相当于电子电路中三极管的功率放大作用;又由于它利用了电机定子中的交轴磁场,故命名为“交磁扩大机”。
3、给定电压电路:直流电动机在不同工作状态下给定电压电路各部分的电流通路如下:图1-2交磁扩大机工作原理图图1-3电机扩大机定子上各绕组的分布图1-4工作台自动循环工作时的速度图1) 正转:正向给定电压取自221-210之间,通过(223-225-220-200)接到控制绕组OⅢ1端,从OⅢ2端出来,经(270-250-230-210)形成回路。
因此给定电压U221-210是正值,中间穿了电压负反馈U f200-H,加在控制绕组上的控制电压U C=U221-210-U f200-H。
2) 反转:反向给定电压取自222-210之间,而U222-210是负值,于是U f200-H也是负值,这样加在OⅢ绕组上的就是负电压,即U C=U222-210-U f200-H是负值。
电流回路学员可以自己分析。
3) 转速的控制:通过调节R-Q、R-H两个大磁盘上的旋臂来实现。
工作台自动循环工作时各段行程的速度见图1-4。
4)停车:按SB10A按钮,由于K JI,K Q(或K H)失电释放,此时给定电压等于零, OⅢ绕组上的控制电压U C=-U f200-H,该负电压促使电机迅速停车。
KT延时约1秒。
其作用是当执行停车操作后,能使给定电压回路继续通电吸合约1秒,使其中的标准电压U205-210,U206-210继续存在,以防止电流截止负反馈发生作用。
为克服停车时的爬行现象,专门设置了图中的(KT-282-RT7)和(280-KT-270)两条支路。
前一条支路的作用是把交磁放大器的输出直接短接,后一条支路的作用是给输入控制电压回路接入深度负反馈电压,从而把由于剩磁电压引起的爬行现象消除掉。
4、各种稳定和反馈环节:该直流电路采用了一系列的稳定工作点措施:1)电压负反馈:组成:由R2的中心抽头(200)至(H)的这部分电阻组成;作用:稳定输出电压。
2)电流正反馈:组成:由绕组OⅡ及绕线电阻RT9、板型电阻R4组成;作用:在大负载情况下补偿电机的转速降落;3)电流截止负反馈:组成:由大功率整流二极管VD1、VD2,及板型电阻R1组成;作用:当负载出现过载或短路时及时动作,限制过载电流在1.7倍额定电流以下;当过载或短路现象消失时,能自动恢复正常运行状态。
4)桥式稳定环节:组成:由绕组OⅠ及板型电阻R3,发电机励磁绕组WC,绕线电阻RT10组成;作用:起阻尼作用,克服整个系统可能出现的振荡现象。
以上各种反馈共同作用,才使得该设备具有反应灵敏,稳定可靠的优点。
5、抬刀电路:本电路中以指示灯1T-4T代替实际电路中抬刀电磁铁的线圈。
第四节交流继电、接触器控制电路B2012A龙门刨床的交流继电、接触器控制电路见附图3。
工作过程分析如下:一、用按钮实现主机M A的起动控制:其起动过程:按SB2A→K CA吸合並自锁,同时KT A、K Y通电吸合,主电机M A Y接起动→延时3~5秒后→KT A(常闭延时断开)断,同时KT A(常开延时闭合)合,为Y-Δ转换作准备→当直流电源建立后,KT△通电吸合,KT△(常闭延时闭合)断开,KT△(常开延时断开)合→K Y断电释放,同时K CB通电吸合並自锁,KT△断电,延时约1秒后,KT△(常闭延时闭合触点)闭合, K△通电吸合→主电机M AΔ接运行,扩大机投入运转,为直流电机起动运行作准备。
KT A的作用是,决定K Y的吸合时间;KT△的作用是,在K Y断开至K△吸合之间设置一个适当的延时时间,这个时间约为1秒,它可防止短路现象的发生。
二、用按钮实现工作台的自动往复循环和其它各种运行状态操作:图1-5龙刨行程开关的状态与工作台速度对应图注:上图中:①前进启动(慢速切入);②工作行程(前进加速);③工作行程(后退复位);④前进减速;⑤前进换向转后退;⑤´工作台终止点;⑥后退加速;⑦后退行程(前进复位);⑧后退减速;⑨后退换向(慢速切入,重复①)。
上图带“”下划线的行程开关表示工作台在起始位置时处于复位状态。
)三、自动控制刀架进刀机构进行进刀、复位、抬刀操作:1、以前进启动为例,分析工作台在前进启动后的自动往复运行中,工作台的状态与电路各部分元件的配合情况(见附图3,同时参考图1-5):在位置①时,按下SB9A→K JI通电吸合→K JI(107-129)闭合,实现自锁→由于S HH在工作台启动时处于动作(置位)状态,S HH(129-153)闭合,K IQ通电吸合→K IQ(303-305)闭合→K QC吸合,垂直刀架进刀机构进刀;又由于S HJ此时也处于置位状态,S HJ(129-157)闭合,通过K IQ(161-163)触点(此时已闭合)→K J通电吸合;同时K JI(111-113)闭合→KQ 通电吸合→直流电路中,KT吸合→接通直流给定电压电路,经过231-237-225-220-200-OⅢ1- OⅢ2-270-212-210,建立正向给定电压(U231-210)→工作台正向启动,进入慢速切入运行段;(左右侧刀架可与垂直刀架同时进刀,读者可自行分析。
以下分析同。
)运行至位置②,S HH复位→SHH(129-153)断开→K IQ断电释放→K IQ(303-305)断开→K QC断电释放;同时由于K IQ(161-163)断开,K J断电释放→直流回路中,给定电压通路变为从221-223-225-220-200-OⅢ1- OⅢ2-270-250-230-210,正向给定电压为U221-210,工作台进入工作行程(其运行速度主要取决于大磁盘旋臂的位置)。
运行至位置③时,S HJ复位→S HJ(129-157)断开,S HJ(211-210)闭合。
由于K J早已失电,回路(270-250-230-210)仍旧闭合,工作台的运行状态不改变,它的功能只是为后面的后退减速作准备,称为前进复位。
继续运行至位置④时,S QJ置位→S QJ(129-159)闭合→K J通电吸合→直流电路中,K J(270-250)断开,S QJ(212-210)断开,给定电压通路至这一段时,走(270-211-210)线;同时K J(223-225)断,而K J(237-225)闭合,此时给定电压为U231-210,与慢速切入速度差不多,进入前进减速运行段;至位置⑤时,S QH置位→S QH(129-155)闭合→K IH通电吸合→K I H(305-307)闭合→K HC 吸合→垂直刀架进刀机构复位操作;同时S QH(107-109)断开→K Q断电释放→K Q(123-125)闭合→K H通电吸合→直流通路中,K Q(225-220)断开,K H(226-220)闭合,施加于OⅢ绕组的给定电压变为负极性电压(U222-210<0),直流电机经反接制动进入后退行程,由于此时K IH(230-210)断开,给定电压通路至这一段时,走(270-211-210)线,后退开始段的稳定速度虽高于慢速切入速度,但低于后退中间段行程的速度;同时K H(1-5)闭合,K Q(5-7)闭合→K2H通电吸合→K2H(1-11)、K2H(12-2)闭合→抬刀电磁铁吸合→所有刀架的进刀机构在进入后退行程时处于抬刀状态;至位置⑥时,S QH复位→S QH(129-155)断开→K IH断电释放→K I H(305-307)断开→K HC 断电释放→进刀机构复位操作停止;同时直流电路中,K IH(230-210)闭合→给定电压通路至这一段时,走(270-250-230-210)线,后退加速;至位置⑦时,S QJ复位→S QJ(129-159)断开,直流回路中S QJ(212-210)闭合,无运行状态改变,为前进减速作准备,称为后退复位;至位置⑧时,S HJ置位→S HJ(129-157)闭合→经K Q(157-163)触点(早已闭合)→K J 通电吸合→直流电路中,K J(270-250)断开,S HJ(211-210)断开,给定电压通路至这一段时,走(270-212-210)线;同时K J(224-226)断,而K J(238-226)闭合,此时给定电压为U232-210(﹤0),与慢速切入速度差不多,进入后退减速运行段;至位置⑨时,S HH置位→S HH(107-119)断开→K H断电释放→K H(113-115)闭合→K Q通电吸合;同时S HH(129-153)闭合→K IQ通电吸合→K IQ(303-305)闭合→K QC吸合,垂直刀架进刀机构进刀;又由于S HJ(129-157)闭合,K IQ(161-163)闭合,K J继续吸合。