东南大学机械原理历年考研试题_部分1
- 格式:pdf
- 大小:5.37 MB
- 文档页数:20
考研机械原理复习试题(含答案)1一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
东南大学二〇〇二年攻读硕士学位研究生入学考试试卷试卷编号:415试题名称:机械原理一、选择题(共16题,每题2分,共32分)(每题给出了3个供选择的答案,从中选出唯一正确的答案)1. 平面四杆机构行程速度变化系数是指从动杆反、正行程。
A.瞬时速度的比值B.最大速度的比值C.平均速度的比值2. 在铰链四杆机构中,若最短构件与最长构件长度之和大于其他两构件长度之和时,则机构中。
A.一定有曲柄存在B.一定无曲柄存在C.不一定有曲柄存在3. 平行四杆机构工作时,其传动角。
A.始终保持为90°B.始终是0°C.是变化的4. 对心曲柄滑块机构以曲柄为原动件时,其最大传动角为A.30°B.45°C.90°5. 在曲柄摇杆机构中,当摇杆为主动件,且处于共线位置时,机构处于死点位置。
A.曲柄与机架B.曲柄与连杆C.连杆与摇杆6. 铰链四杆机构中有两个构件长度相等且为最短,其余两构件长度不同,若取一个最短杆作机架,则得到机构。
A.曲柄摇杆B.双曲柄C.双摇杆7. 铰链四杆机构中存在曲柄时,曲柄是最短构件。
A.一定B.不一定C.一定不8. 要将一个曲柄摇杆机构转化成为双摇杆机构,可用机架转化法将原机构的。
A.曲柄作为机架B.连杆作为机架C.摇杆作为机架9. 对于双摇杆机构,最短构件与最长构件长度之和大于其它两构件长度之和。
A.一定B.不一定C.一定不10. 当凸轮机构从动件推程按等加速等减速规律运动时,推程开始和结束位置冲击。
A.存在刚性B.存在柔性C.不存在11. 渐开线直齿圆柱齿轮传动的可分性是指不受中心距变化的影响。
A.节圆半径B.传动比C.啮合角12. 为保证一对渐开线齿轮可靠地连续定比传动,应使实际啮合线长度基节。
A.大于B.等于C.小于13. 一对渐开线标准齿轮在标准安装情况下,两齿轮分度圆的相对位置应该是。
A.相交的B.相切的C.分离的14. 用范成法切制渐开线齿轮时,齿轮根切的现象可能发生在的场合。

写在前言:
以下的答案是我的一位同学在考前几天发给我的,由于之前13至15都没答案,有些题目做得稀里糊涂的。
作为过来人,我深知你们对答案的渴求,现在在你们刚准备考研时,我将他们整理好送给你们,也算是将传统发扬光大,希望你们好好珍惜,不要走我们所走过的弯路,最后祝各位2017的考研成功!努力吧,少年们!(个人对高价卖资料非常痛恨,群里的资料足够你用的了,希望你们不要花冤枉钱,这是学长发自肺腑之言。
当然,我也希望你们不要以此牟利。
)
13年答案:。
平面机构自由度1一、单项选择题1、机构具有确定运动的条件是( C )。
A. 自由度大于1B. 自由度大于零C. 自由度大于零且等于原动件数D. 原动件数大于等于12、当机构的自由度数F >0,且F( B )原动件数,则该机构即具有确定运动。
A. 小于B. 等于C. 大于D. 大于或等于3、组成平面移动副的两个构件在接触处引入( B )个约束。
A. 1B. 2C. 3D. 44、平面运动副引入的约束数最多为( B )个。
A. 1B. 2C. 3D. 45、平面机构中若引入一个高副将带入( A )个约束。
A. 1B. 2C. 3D. 4二、填空题1、平面机构中的转动副引入____2____个约束。
2、由M个构件汇集而成的复合铰链应当包含有___ M-1____个转动副。
3、平面运动副的最大约束数为____2______。
4、平面运动副的最小约束数为_____1_____。
5、构件是机构中的运动单元体。
6、组成构件的零件是制造单元。
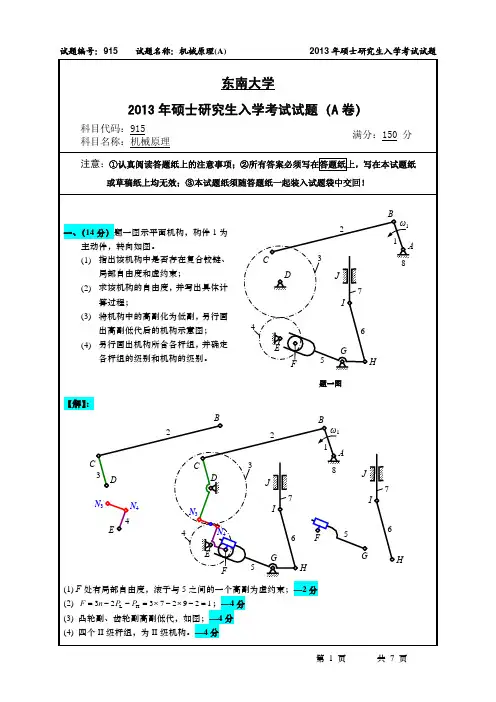
三、计算题1、图示机构(1)该机构若存在复合铰链、局部自由度和虚约束,试在图上指出;(2)求该机构的自由度(要求有具体计算过程)。
(1)F处复合铰链——1分(2)F=3×9-2×13=1——5分2、图示机构(1)该机构若存在复合铰链、局部自由度和虚约束,试在图上指出;(2)求该机构的自由度(要求有具体计算过程)。
(1)复合铰链1处,虚约束1处——2分(2)F=3×6-2×8-1=1——4分3、图示机构(1)该机构若存在复合铰链、局部自由度和虚约束,试在图上指出;(2)求该机构的自由度(要求有具体计算过程)。
(1)复合铰链1处,局部自由度1处,虚约束4处——3分(2)F=3×9-2×12-2=1——3分4、图示机构(1)该机构若存在复合铰链、局部自由度和虚约束,试在图上指出;(2)求该机构的自由度(要求有具体计算过程)。