2-STM32串口通信实验讲解学习
- 格式:ppt
- 大小:2.36 MB
- 文档页数:40
stm32实训报告经验总结STM32实训报告经验总结一、引言在这次STM32实训中,我深入了解了微控制器的基本原理和操作,学会了使用Keil MDK-ARM软件进行编程,掌握了STM32的GPIO、串口、定时器等基本外设的使用。
通过实际操作,我对于嵌入式系统设计和开发有了更深刻的理解。
二、实训过程1. 基础知识学习:首先,我通过阅读教材和网上资料,学习了微控制器的基本概念、STM32的体系结构和外设特性。
我了解到,STM32是一款功能强大的32位ARM Cortex-M核微控制器,具有丰富的外设接口和强大的处理能力。
2. 开发环境搭建:我按照教程安装了Keil MDK-ARM软件,配置了开发环境。
Keil软件提供了完整的开发工具链,包括代码编辑、编译链接、调试和仿真等功能。
3. 硬件平台搭建:我使用STM32开发板搭建了硬件平台。
我熟悉了开发板的电路原理图和引脚配置,了解了各个外设接口的使用方法。
4. 编程实践:在理解了基本概念和操作方法后,我开始进行编程实践。
我编写了GPIO输入输出、串口通信、定时器中断等程序,通过实际操作掌握了STM32的基本外设使用。
5. 调试与优化:在编程过程中,我遇到了许多问题,通过查阅资料和反复调试,最终解决了问题。
我还对程序进行了优化,提高了程序的效率和稳定性。
三、实训收获通过这次实训,我掌握了STM32微控制器的开发流程和基本外设的使用方法。
我学会了使用Keil MDK-ARM软件进行编程和调试,了解了嵌入式系统设计和开发的实际操作过程。
同时,我在实践中遇到了许多问题,通过解决问题,我提高了解决问题的能力。
四、展望未来这次实训让我对嵌入式系统设计和开发有了更深刻的理解。
在未来的学习和工作中,我将继续深入学习嵌入式系统的相关知识,掌握更多的技能和方法。
同时,我将尝试将所学知识应用到实际项目中,提高自己的实践能力和工程经验。
stm32实训心得体会篇一:STM32 实验2报告实验2MINI STM32按键控制LED灯实验一、实验目的1、掌握嵌入式程序设计流程。
2、熟悉STM32固件库的基本使用。
二、实验内容1、编程使用I/O口作为输入,控制板载的两个LED 灯。
2、使用固件库编程。
三、实验设备硬件: PC机一台MINI STM32开发板一套软件: RVMDK 一套Windows XP 一套四、实验步骤1、设计工程,使用固件库来编程设置。
、在这里我们建立一个文件夹为: STM32-Projects.点击Keil 的菜单:Project –>New Uvision Project ,然后将目录定位到刚才建立的文件夹STM32-Projecst 之下,在这个目录下面建立子文件夹shiyan1, 然后定位到 shiyan1目录下面,我们的工程文件就都保存到shiyan1 文件夹下面。
工程命名为shiyan1, 点击保存.是这个型号。
、这里我们定位到STMicroelectronics 下面的STM32F103RB( 针对我们的mini 板子、弹出对话框“Copy STM32 Startup Code to project ?.”,询问是否添加启动代码到我们的工程中,这里我们选择“否”,因为我们使用的ST固件库文件已经包含了启动文件。
、接下来,我们在 Template 工程目录下面,新建3 个文件夹 CORE, USER,STM32F10x_FWLib 。
USER 用来放我们主函数文件 , 以及其他包括system_ 等等,CORE 用来存放启动文件等,STM32F10x_FWLib 文件夹顾名思义用来存放ST官方提供的库函数源码文件.、.打开官方固件库包,定位到我们之前准备好的固件库包的目录。
STM32F10x_StdPeriph_Lib_\Libraries\STM32F10x_StdPer iph_Driver 下面,将目录下面的src,inc 文件夹 copy 到我们刚才建立的STM32F10x_FWLib 文件夹下面。
stm32串口通信实验原理STM32是一款由STMicroelectronics公司推出的基于ARM Cortex-M 内核的32位微控制器。
在STM32系列中,串口通信是一种常见的外设模块,可以实现与其他设备之间的数据传输。
本文将介绍STM32串口通信的原理及实验方法。
一、串口通信的原理串口通信是一种通过串行方式传输数据的通信方式。
在串口通信中,数据是一位一位地依次发送或接收的。
与并行通信相比,串口通信只需要两根信号线即可实现数据的传输,因此在资源有限的嵌入式系统中被广泛应用。
STM32的串口通信模块包括多个寄存器,其中包括控制寄存器、状态寄存器、数据寄存器等。
通过配置这些寄存器,可以实现串口通信的参数设置和数据的发送接收。
二、STM32串口通信的实验步骤以下是一种基本的STM32串口通信实验步骤:1. 硬件连接:将STM32开发板的串口引脚与其他设备的串口引脚通过串口线连接起来。
一般来说,串口通信需要连接的引脚包括TX (发送引脚)、RX(接收引脚)、GND(地线)。
2. 引脚配置:通过STM32的引脚复用功能,将相应的GPIO引脚配置为串口功能。
具体的引脚配置方法可以参考STM32的开发板手册或者相关的资料。
3. 时钟配置:配置STM32的时钟源,使得串口通信模块能够正常工作。
一般来说,串口通信模块使用的时钟源可以选择系统时钟或者外部时钟。
4. 串口配置:配置串口通信模块的参数,包括波特率、数据位、停止位、校验位等。
这些参数的配置需要根据实际的通信需求来确定。
5. 数据发送:通过向数据寄存器写入数据,向其他设备发送数据。
在发送数据之前,需要通过状态寄存器的标志位判断串口是否空闲,以确保数据能够正常发送。
6. 数据接收:通过读取数据寄存器的数据,从其他设备接收数据。
在接收数据之前,需要通过状态寄存器的标志位判断是否有数据到达,以确保数据能够正确接收。
7. 中断处理:在串口通信过程中,可以使用中断来实现数据的异步传输。
基于stm32的串口通信课程设计基于STM32的串口通信课程设计可以涵盖以下方面的内容:硬件准备:选择适合的STM32微控制器开发板,如STM32F4 Discovery或STM32F103C8T6等。
连接串口调试器(如USB转串口模块)与开发板的串口接口。
连接相关外设(如传感器,显示器等)到开发板的其他GPIO引脚。
开发环境设置:下载并安装STM32CubeIDE或其他适用的开发环境。
配置开发环境以支持选定的STM32开发板。
串口通信基础:学习串口通信的基本原理和通信协议(如UART)。
了解STM32的串口模块的配置和使用方法。
串口发送和接收:学习如何在STM32上配置和初始化串口模块。
实现串口数据的发送和接收功能。
使用中断或DMA方式处理串口数据的发送和接收。
数据解析和显示:设计数据帧格式,包括起始标志、数据字段、校验等。
实现数据解析算法,将接收到的数据解析为可识别的信息。
将解析后的数据通过LCD显示或其他方式展示出来。
通信协议扩展:实现更复杂的通信协议,如帧同步、差错校验、数据压缩等。
添加数据加密、认证或其他安全性功能。
支持多设备通信,如主从通信或多点通信。
实际应用案例:根据实际需求设计和实现一个具体的应用,如传感器数据采集和监控系统、远程控制系统等。
在设计课程时,可以结合理论讲解、实验演示和实际项目实践,使学生能够全面理解串口通信的原理和应用。
此外,建议提供相应的教学资源,如开发板的用户手册、技术文档和示例代码,以便学生更好地学习和实践。
以下是一个基于STM32的串口通信课程设计的简单示例:课程目标:设计一个基于STM32的温度监测系统,通过串口将采集到的温度数据发送到计算机,并在计算机上进行实时显示。
课程内容:硬件准备:使用STM32F4 Discovery开发板和一个温度传感器(例如LM35)。
连接温度传感器到开发板的一个模拟输入引脚(如PA0)。
连接开发板的串口接口(如USART2)到计算机的串口调试器。
STM32串口教程STM32是一种基于ARM Cortex-M内核的32位微控制器系列。
它具有强大的处理能力和丰富的外设接口,适用于各种嵌入式应用。
其中,串口通信是STM32常用的外设之一,可以用于和其他设备进行数据的收发。
本文将介绍STM32串口的配置和使用方法。
一、串口的基本原理串口是一种以串行方式传输数据的通信方式。
在串口通信中,数据按照比特位的顺序传输,一次传输一个位。
数据的传输包括一个或多个字节,每个字节由8位组成,其中包括1位起始位、1位停止位和可选的奇偶校验位。
串口通信需要两根信号线,一根用于发送数据(TX),一根用于接收数据(RX)。
二、STM32串口的配置配置串口的步骤如下:1.设置GPIO引脚功能和模式:将串口的引脚配置为复用功能,并设置引脚的模式为推挽输出。
2.使能串口时钟:根据串口的编号,使能对应串口的时钟。
3.配置串口参数:设置串口的波特率、数据位、停止位、奇偶校验位等参数。
4.使能串口:使能串口的发送和接收功能。
三、STM32串口的使用方法配置完成后,即可使用STM32的串口进行数据的收发。
下面是使用STM32串口的一般流程:1.发送数据:将要发送的数据写入到串口的发送缓冲区,等待数据发送完成。
2.接收数据:检测是否有数据接收到,如果有则读取数据。
在发送数据时,可以使用printf函数实现方便的格式化输出。
为了使用printf函数,需要先配置printf函数的底层接口。
可以使用标准库提供的函数重定向方法,将输出重定向到串口。
在接收数据时,可以使用中断方式或轮询方式。
中断方式需要配置串口的中断,并在中断服务函数中处理接收到的数据。
轮询方式是在主循环中不断检测数据是否接收到,并进行读取。
四、常见问题及解决方法1.串口通信乱码问题:可能是波特率设置不正确导致的,可以检查波特率设置是否和目标设备匹配。
2.串口接收数据丢失问题:可能是接收缓冲区溢出导致的,可以增加接收缓冲区的大小或者使用中断方式处理接收数据。
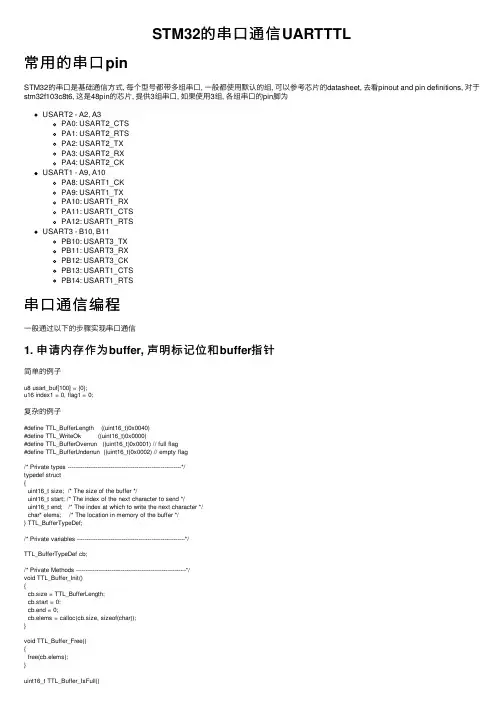
STM32的串⼝通信UARTTTL常⽤的串⼝pinSTM32的串⼝是基础通信⽅式, 每个型号都带多组串⼝, ⼀般都使⽤默认的组, 可以参考芯⽚的datasheet, 去看pinout and pin definitions, 对于stm32f103c8t6, 这是48pin的芯⽚, 提供3组串⼝, 如果使⽤3组, 各组串⼝的pin脚为USART2 - A2, A3PA0: USART2_CTSPA1: USART2_RTSPA2: USART2_TXPA3: USART2_RXPA4: USART2_CKUSART1 - A9, A10PA8: USART1_CKPA9: USART1_TXPA10: USART1_RXPA11: USART1_CTSPA12: USART1_RTSUSART3 - B10, B11PB10: USART3_TXPB11: USART3_RXPB12: USART3_CKPB13: USART1_CTSPB14: USART1_RTS串⼝通信编程⼀般通过以下的步骤实现串⼝通信1. 申请内存作为buffer, 声明标记位和buffer指针简单的例⼦u8 usart_buf[100] = {0};u16 index1 = 0, flag1 = 0;复杂的例⼦#define TTL_BufferLength ((uint16_t)0x0040)#define TTL_WriteOk ((uint16_t)0x0000)#define TTL_BufferOverrun ((uint16_t)0x0001) // full flag#define TTL_BufferUnderrun ((uint16_t)0x0002) // empty flag/* Private types -------------------------------------------------------------*/typedef struct{uint16_t size; /* The size of the buffer */uint16_t start; /* The index of the next character to send */uint16_t end; /* The index at which to write the next character */char* elems; /* The location in memory of the buffer */} TTL_BufferTypeDef;/* Private variables ----------------------------------------------------------*/TTL_BufferTypeDef cb;/* Private Methods -----------------------------------------------------------*/void TTL_Buffer_Init(){cb.size = TTL_BufferLength;cb.start = 0;cb.end = 0;cb.elems = calloc(cb.size, sizeof(char));}void TTL_Buffer_Free(){free(cb.elems);}uint16_t TTL_Buffer_IsFull(){return (cb.end + 1) % cb.size == cb.start;}uint16_t TTL_Buffer_IsEmpty(){return cb.end == cb.start;}uint16_t TTL_Buffer_Write(char c){// check for a buffer overrunif (TTL_Buffer_IsFull()) {return TTL_BufferOverrun;} else {cb.elems[cb.end] = c;cb.end = (cb.end + 1) % cb.size;}return TTL_WriteOk;}uint16_t TTL_Buffer_Read(char* c){// check for a buffer underrunif (TTL_Buffer_IsEmpty()) {return TTL_BufferUnderrun;} else {*c = cb.elems[cb.start];cb.start = (cb.start + 1) % cb.size;}}2. 初始化UART端⼝: 使能GPIO, UART, NVIC /* Public Methods -----------------------------------------------------------*/void TTL_Init(){// Structures to hold the initialisation dataGPIO_InitTypeDef GPIO_InitStruct;USART_InitTypeDef USART_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;// enable the peripherals we're going to useRCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);// Usart1 Tx is on GPIOB pin 6 as an alternative functionGPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;GPIO_Init(GPIOB, &GPIO_InitStruct);// Connect pin 6 to the USARTGPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_USART1);// fill in the interrupt configurationNVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);// init the USART to 8:N:1 at 9600 baud as specified in the// TTL data sheetUSART_ART_BaudRate = 9600;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_ART_Mode = USART_Mode_Tx;USART_Init(USART1, &USART_InitStruct);// Enable USART1 peripheralUSART_Cmd(USART1, ENABLE);// ensure USART1 interrupts are off until we have dataUSART_ITConfig(USART1, USART_IT_TXE, DISABLE);// prepare the bufferTTL_Buffer_Init();}3. 实现中断处理⽅法读消息/* Public Methods -----------------------------------------------------------*//** Handles all interrupts for USART1.*/void USART1_IRQHandler(void){// is this interrupt telling us that we can send a new character?if (USART_GetITStatus(USART1, USART_IT_TXE) != RESET) {// is there something for us to read?if (TTL_Buffer_IsEmpty()) {// no, disable the interruptUSART_ITConfig(USART1, USART_IT_TXE, DISABLE);} else {// yes, get the next character from the bufferchar c = 0x00;TTL_Buffer_Read(&c);// send it to the deviceUSART_SendData(USART1, c);}}}4. ⼯具⽅法: 写消息, 反初始化(⾮必须)注意在每次调⽤USART_SendData这个⽅法之后, 都需要阻塞判断 USART_FLAG_TC 是否为SET才能继续往下执⾏. ...USART_SendData(USART1, *str++);while( USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);...例如/* Public Methods -----------------------------------------------------------*/void TTL_DeInit(){// disable the interruptsUSART_ITConfig(USART1, USART_IT_TXE, DISABLE);// free the bufferTTL_Buffer_Free();}uint16_t TTL_IsBufferFull(){return TTL_Buffer_IsFull();}uint16_t TTL_WriteMessage(char* text, uint16_t length){// index into the character arrayuint16_t i = 0;// return valueuint16_t rv = TTL_WriteOk;while(length--) {USART_SendData(USART1, *text++);// USART_SendData(USART1,(uint16_t) *text++);// Loop until the end of transmissionwhile(USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);}// enable the interrupt to send the messageUSART_ITConfig(USART1, USART_IT_TXE, ENABLE);return rv;}代码例⼦这是⼀个完整的代码例⼦, 适⽤于STM32F103#include "sys.h"#include "usart.h"#include "delay.h"u8 usart1_buf[100] = {0}, usart2_buf[100] = {0}, usart3_buf[100] = {0};u16 index1 = 0, index2 = 0, index3 = 0, flag1 = 0, flag2 = 0, flag3 = 0;void uart_init(u32 bound){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 | RCC_APB1Periph_USART3, ENABLE);//使能USART1,GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);/*************UART1********************/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.9//USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输⼊GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.10NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //⼦优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器USART_ART_BaudRate = bound;//串⼝波特率USART_ART_WordLength = USART_WordLength_8b; //字长为8位数据格式USART_ART_StopBits = USART_StopBits_1; //⼀个停⽌位USART_ART_Parity = USART_Parity_No; //⽆奇偶校验位USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //⽆硬件数据流控制 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串⼝1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串⼝接受中断USART_Cmd(USART1, ENABLE); //使能串⼝1/***************UART2******************/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.2GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输⼊GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.3NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //⼦优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器USART_ART_BaudRate = bound;//串⼝波特率USART_ART_WordLength = USART_WordLength_8b; //字长为8位数据格式USART_ART_StopBits = USART_StopBits_1; //⼀个停⽌位USART_ART_Parity = USART_Parity_No; //⽆奇偶校验位USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //⽆硬件数据流控制 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART2, &USART_InitStructure); //初始化串⼝2USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串⼝接受中断USART_Cmd(USART2, ENABLE); //使能串⼝2/****************UART3***********************///USART3_TX GPIOB.10GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB.10GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB.10//USART3_RX GPIOB.11GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //PB11GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输⼊GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB.11//Usart3 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; //抢占优先级4NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //⼦优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器USART_ART_BaudRate = 115200; //串⼝波特率USART_ART_WordLength = USART_WordLength_8b; //字长为8位数据格式USART_ART_StopBits = USART_StopBits_1; //⼀个停⽌位USART_ART_Parity = USART_Parity_No; //⽆奇偶校验位USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //⽆硬件数据流控制 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART3, &USART_InitStructure); //初始化串⼝3USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //开启串⼝接受中断USART_Cmd(USART3, ENABLE);}/**每个字节⼀个中断, 这⾥⽤0x0a作为⼀条消息读取结束*/void USART1_IRQHandler(void){u16 code;if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {USART_ClearITPendingBit(USART1, USART_IT_RXNE);//Removal of receiving interrupt flagcode = USART_ReceiveData(USART1);usart1_buf[index1] = code;index1++;if(code == 0x0a) {index1 = 0;flag1 = 1;}}}void USART2_IRQHandler(void){u16 code;if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {USART_ClearITPendingBit(USART2, USART_IT_RXNE);code=USART_ReceiveData(USART2);usart2_buf[index2] = code;index2++;if(code == 0x0a) {index2 = 0;flag2 = 1;}}}void USART3_IRQHandler(void){u16 code;if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) {USART_ClearITPendingBit(USART3, USART_IT_RXNE);code = USART_ReceiveData(USART3);usart3_buf[index3] = code;index3++;if(code == 0x0a) {index3 = 0;flag3 = 1;}}}void USART1_Send(u8 *str){while(*str != 0x0a) {USART_GetFlagStatus(USART1, USART_FLAG_TC);USART_SendData(USART1, *str++);while( USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET);}USART_SendData(USART1, 0x0a);}void USART2_Send(u8 *str){while(*str != 0x0a) {USART_GetFlagStatus(USART2, USART_FLAG_TC);USART_SendData(USART2, *str++);while( USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET);}USART_SendData(USART2, 0x0a);}void USART3_Send(u8 *str){while(*str != 0x0a) {USART_GetFlagStatus(USART3, USART_FLAG_TC);USART_SendData(USART3, *str++);while( USART_GetFlagStatus(USART3,USART_FLAG_TC) != SET); }USART_SendData(USART3, 0x0a);}/*******************main***********************/#include "led.h"#include "delay.h"#include "key.h"#include "sys.h"#include "usart.h"#include "buzzer.h"#include "string.h"int main(void){u8 Zigb_Head[]="ZigB:";u8 buf[100];delay_init();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);uart_init(115200);Buzzer_Init();LED_Init();while(1) {if(flag2 == 1) {LED0=0;flag2=0;USART3_Send(usart2_buf);memset(usart2_buf,0,sizeof(usart2_buf));} else if(flag3==1) {LED1=0;flag3=0;memcpy(buf,Zigb_Head,sizeof(Zigb_Head));strcat(buf,usart3_buf);USART2_Send(buf);memset(buf,0,sizeof(buf));}delay_ms(500);LED1=1;LED0=1;delay_ms(500);}}参考。
SPI1SPI2_DMA通信实验(STM32)STM32学习笔记(⼆)——之SPI_DMA寄存器级操作⼀、实验⽬标学会配置STM32的SPI寄存器和DMA寄存器,实现STM32的SPI1与SPI2通信功能,每次发送⼀字节数据,并可多次发送,如果接收的数据正确,则点亮LED灯。
⼆、实验⽬的加⼊DMA的SPI通信相对于普通SPI通信有什么好处?ST给SPI加了DMA功能出于什么⽬的?我觉得这是很重要的⼀个问题,⼀直边学习边想。
以下是我的看法:减少CPU负荷?我想这应该是DMA最主要的功能,可是对于SPI通信来说,其实⼤部分时候我们需要根据发送的指令->⽬标器件的应答来决定下⼀个指令,所以此时CPU还是需要⼀直等待每次通信的结束。
⽽且像SD卡的操作,是⼀个顺序流的指令操作过程,⽤中断也不容易控制。
那到底加⼊了DMA有什么好处?仔细查看了STM32F10xxx的⽤户⼿册,发现这么⼀⾏字“连续和⾮连续传输:当在主模式下发送数据时,如果软件⾜够快,能够在检测到每次TXE的上升沿(或TXE中断),并⽴即在正在进⾏的传输结束之前写⼊SPI_DR寄存器,则能够实现连续的通信;此时,在每个数据项的传输之间的SPI时钟保持连续,同时BSY位不会被清除。
如果软件不够快,则会导致不连续的通信;这时,在每个数据传输之间会被清除”以及也就是说如果连续传输⽽不使⽤DMA的话,需要CPU不停检测TXE并很快地置⼊SPI->DR的值,对于复杂程序的话这是很难达到的,⽽如果使⽤DMA,就可以轻易实现连续传输,CPU只需等待其完成就好。
我想到的⼀个应⽤就是在写SD卡的时候,每次写⼀个块512字节,就可以⽤到,能提⾼SD卡的写⼊数据速率。
其次还可以降低功耗,记得数字集成电路⽼师说过⼀句话“软件上降低数字电路功耗的⼀个⽅法就是减少电平转换。
”那么连续通信的时候,像SPI的BSY电平转换会⼤⼤减少!最后⼀点,虽然效果不⼤,就是如果不是⽤DMA,那么CPU的⼯作就是搬运⼯,把SPI->DR 的内容搬到内存存储起来,⽽如果使⽤DMA,就省略了这个环节!我想,为什么实现同⼀个功能,有的执⾏起来很流畅,有的却很卡,应该和这些⼩细节的减载有关吧。
stm32串⼝实验:stm32通过usart1进⾏串⼝收发,PA9(TX)和PA10(RX)这是stm32开发中⽐较简单的实验,原理是通过串⼝助⼿发送信息,stm32接收到信息以后在串⼝助⼿中打印相同的内容。
这⾥直接分享keil5⼯程代码,是在⼯程模板的基础上移植和修改了正点原⼦的串⼝代码(如果失效的话可以在下⽅评论留下邮箱,我看到会给你发⼀份)顺便把usart.c和usart.h还有mian.c中的代码复制到下⾯,⼩伙伴可以直接移植到⾃⼰的⼯程中实现的效果也在下⾯放上串⼝助⼿中显⽰的图⽚usart.c1 #include "sys.h"2 #include "usart.h"345//STM32F103核⼼板例程6//库函数版本例程7/********** 出品 ********/8910//////////////////////////////////////////////////////////////////////////////////11//如果使⽤ucos,则包括下⾯的头⽂件即可.12#if SYSTEM_SUPPORT_UCOS13 #include "includes.h"//ucos 使⽤14#endif15//////////////////////////////////////////////////////////////////////////////////16//STM32开发板17//串⼝1初始化1819//////////////////////////////////////////////////////////////////////////////////202122//////////////////////////////////////////////////////////////////23//加⼊以下代码,⽀持printf函数,⽽不需要选择use MicroLIB24#if 125#pragma import(__use_no_semihosting)26//标准库需要的⽀持函数27struct __FILE28 {29int handle;3031 };3233 FILE __stdout;34//定义_sys_exit()以避免使⽤半主机模式35void _sys_exit(int x)36 {37 x = x;38 }39//重定义fputc函数40int fputc(int ch, FILE *f)41 {42while((USART1->SR&0X40)==0);//循环发送,直到发送完毕43 USART1->DR = (u8) ch;44return ch;45 }46#endif4748/*使⽤microLib的⽅法*/49/*50int fputc(int ch, FILE *f)51{52 USART_SendData(USART1, (uint8_t) ch);5354 while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}5556 return ch;57}58int GetKey (void) {5960 while (!(USART1->SR & USART_FLAG_RXNE));6162 return ((int)(USART1->DR & 0x1FF));63}64*/6566#if EN_USART1_RX //如果使能了接收67//串⼝1中断服务程序68//注意,读取USARTx->SR能避免莫名其妙的错误69 u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.70//接收状态71//bit15,接收完成标志72//bit14,接收到0x0d73//bit13~0,接收到的有效字节数⽬74 u16 USART_RX_STA=0; //接收状态标记7576void uart_init(u32 bound){77//GPIO端⼝设置78 GPIO_InitTypeDef GPIO_InitStructure;79 USART_InitTypeDef USART_InitStructure;80 NVIC_InitTypeDef NVIC_InitStructure;8182 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 83//USART1_TX PA.984 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.985 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;86 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出87 GPIO_Init(GPIOA, &GPIO_InitStructure);8889//USART1_RX PA.1090 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;91 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输⼊92 GPIO_Init(GPIOA, &GPIO_InitStructure);9394//Usart1 NVIC 配置9596 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;97 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级398 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //⼦优先级399 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能100 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器101102//USART 初始化设置103104 USART_ART_BaudRate = bound;//⼀般设置为9600;105 USART_ART_WordLength = USART_WordLength_8b;//字长为8位数据格式106 USART_ART_StopBits = USART_StopBits_1;//⼀个停⽌位107 USART_ART_Parity = USART_Parity_No;//⽆奇偶校验位108 USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//⽆硬件数据流控制109 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式110111 USART_Init(USART1, &USART_InitStructure); //初始化串⼝112 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断113 USART_Cmd(USART1, ENABLE); //使能串⼝114115 }116117118119void USART1_IRQHandler(void) //串⼝1中断服务程序120 {121 u8 Res;122 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.123 OSIntEnter();124#endif125if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)126 {127 Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据128129if((USART_RX_STA&0x8000)==0)//接收未完成130 {131if(USART_RX_STA&0x4000)//接收到了0x0d132 {133if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始134else USART_RX_STA|=0x8000; //接收完成了135 }136else//还没收到0X0D137 {138if(Res==0x0d)USART_RX_STA|=0x4000;139else140 {141 USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;142 USART_RX_STA++;143if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收144 }145 }146 }147 }148 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.149 OSIntExit();150#endif151 }152#endifusart.h1 #ifndef __USART_H2#define __USART_H3 #include "stdio.h"4 #include "sys.h"56//STM32F103核⼼板例程7//库函数版本例程8/********** 出品 ********/910//////////////////////////////////////////////////////////////////////////////////11//STM32开发板12//串⼝1初始化1314#define USART_REC_LEN 200 //定义最⼤接收字节数 20015#define EN_USART1_RX 1 //使能(1)/禁⽌(0)串⼝1接收1617extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.末字节为换⾏符18extern u16 USART_RX_STA; //接收状态标记19//如果想串⼝中断接收,请不要注释以下宏定义20void uart_init(u32 bound);21#endifmain.c1 #include "sys.h"2 #include "delay.h"3 #include "usart.h"45 uint8_t t;6 uint8_t len;7 uint16_t times=0;89int main(void)10 {11 delay_init(); //延时函数初始化12 uart_init(115200); //串⼝初始化为1152001314while(1)15 {16if(USART_RX_STA&0x8000) //USART_RX_STA第⼗六位为1则括号内为1,表⽰接收完数据17 {18 len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度19 printf("\r\n您发送的消息为:\r\n\r\n");20for(t=0;t<len;t++)21 {22 USART_SendData(USART1, USART_RX_BUF[t]);//向串⼝1发送数据23while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束24 }25 printf("\r\n\r\n");//插⼊换⾏26 USART_RX_STA=0;27 }else28 {29 times++;30if(times%500==0)printf("请输⼊数据,以回车键结束\n");31 delay_ms(10);32 }33 }34 }串⼝实验效果图:未发送时发送数据时:祝⼩伙伴们2020加油!。
基于stm32的串口通信的自我总结1. 背景介绍近年来,随着物联网和嵌入式系统的快速发展,嵌入式开发领域的需求也越来越大。
而基于stm32的串口通信技术在嵌入式开发中扮演着重要的角色。
串口通信是嵌入式系统中常用的通信方式,它可以实现单片机与外部设备之间的数据传输,应用广泛。
本文将对基于stm32的串口通信进行总结和归纳,旨在共享相关经验和教训,方便读者更好地应用该技术。
2. stm32串口通信的原理基于stm32的串口通信涉及到串口的相关知识和stm32单片机的硬件支持。
在串口通信中,常用的有UART、USART、RS232等协议。
而stm32单片机作为一款常用的嵌入式处理器,在硬件上支持多个串口通信接口,如USART1、USART2、UART4等。
在实际应用中,需要根据具体的需求选择合适的串口通信接口,并在软件上进行相应的配置和驱动。
在stm32的串口通信中,需要了解串口通信的相关寄存器、时钟配置等,以实现数据的可靠传输。
3. 基于stm32的串口通信应用基于stm32的串口通信可以应用在很多场景下,比如与PC机的数据通信、与外部传感器的数据采集等。
在实际的应用中,需要根据具体的需求和外部设备的通信协议选择合适的串口通信接口,并在程序中进行相应的配置和驱动。
另外,在实际的应用过程中,需要考虑串口通信的稳定性和可靠性,并进行相应的错误处理和数据校验,以确保数据的正确传输。
4. 基于stm32的串口通信的优化在实际的应用中,基于stm32的串口通信可能会遇到一些性能上的瓶颈和稳定性的问题。
针对这些问题,可以采取一些优化的措施,比如合理设计串口通信的协议、优化中断服务程序、增加数据校验和重发机制等,以实现串口通信的稳定和高效。
5. 结语基于stm32的串口通信技术在嵌入式系统中应用广泛,本文总结了关于该技术的相关知识和经验。
通过对串口通信的原理、应用和优化进行总结,可以帮助读者更好地理解和应用该技术,提高嵌入式系统的开发效率和质量。
stm32 串口通信数据发送和波特率生成原理串口通信是通过串口发送和接收数据的方式进行通信的一种方式。
在STM32微控制器中,可以使用USART模块来实现串口通信。
USART模块提供了寄存器来配置串口的波特率及其他参数,并且提供了发送和接收数据的功能。
首先,我们需要了解一下串口通信中的波特率。
波特率是指每秒钟传送的位数。
在串口通信中,波特率用来表示每秒传输的比特数。
常见的波特率有9600bps、115200bps等。
STM32系列微控制器提供了一个时钟源,该时钟源可以用来生成波特率。
一般情况下,波特率的生成与STM32微控制器的主时钟CLK相关,主时钟经过分频和倍频等操作可以生成不同的波特率。
具体来说,可以通过配置USART的寄存器来设置波特率发生器的参数。
对于STM32微控制器中的USART模块,一般包含以下与波特率相关的寄存器:1. BRR (波特率发生器寄存器):用于设置USART的波特率。
该寄存器包含了DIV_Mantissa和DIV_Fraction两个字段,分别用于设置整数和小数部分的分频系数。
2. BRR寄存器的设置:- 对于USART模块,BRR寄存器的值可以通过公式 BRR = USARTDIV = (fck + (Baudrate/2)) / Baudrate 来计算得到。
其中,fck表示USART的输入时钟频率,Baudrate表示所需的波特率。
根据这个公式,可以计算出合适的分频系数并设置到BRR寄存器中。
- 在STM32微控制器中,每个USART模块都有自己的BRR寄存器,可以通过设置这个寄存器来实现不同的波特率。
3. CR1寄存器:该寄存器中的配置位与波特率设置相关。
例如,使用OVER8位来选择是否使用8个采样位。
有了波特率的设置,就可以通过USART模块发送和接收数据。
STM32提供了发送与接收数据的寄存器,例如:1. USART_TXDR寄存器:用于写入要发送的数据。
STM32串口通信学习总结STM32是STMicroelectronics推出的一款32位单片机系列,具有高性能、低功耗、丰富的外设等特点,广泛应用于工业控制、消费电子、汽车电子等领域。
其中,串口通信是单片机中常用的通信方式之一,本文将对STM32串口通信学习进行总结。
1.串口通信原理及基础知识在STM32中,USART(通用同步/异步收发器)是负责串口通信的外设。
USART提供了多种模式的串口通信,包括异步模式(Asynchronous)、同步模式(Synchronous)以及单线模式(Single-wire)等。
2.STM32串口通信配置步骤(1)GPIO配置:首先需要配置串口通信所涉及的GPIO引脚,通常需要配置为复用功能,使其具备USART功能。
(2)USART配置:根据需要选择USART1、USART2、USART3等串口进行配置,设置通信模式、波特率等参数。
在配置时需要注意与外部设备的通信标准和参数保持一致。
(3)中断配置(可选):可以选择中断方式来实现串口数据的收发。
通过配置中断,当接收到数据时会触发中断,从而实现接收数据的功能。
(4)发送数据:通过USART的发送寄存器将数据发送出去,可以通过查询方式或者中断方式进行发送。
(5)接收数据:通过读取USART的接收寄存器,获取接收到的数据。
同样可以通过查询方式或者中断方式进行接收。
3.常见问题及解决方法(1)波特率设置错误:在进行串口通信时,波特率设置错误可能会导致通信失败。
需要根据外设的要求,选择适当的波特率设置,并在STM32中进行配置。
(2)数据丢失:在高速通信或大量数据传输时,由于接收速度跟不上发送速度,可能会导致数据丢失。
可以通过增加接收缓冲区大小、优化接收中断处理等方式来解决该问题。
(3)数据帧错误:在数据传输过程中,可能发生数据位错误、校验错误等问题。
可以通过对USART的配置进行检查,包括校验位、停止位、数据位等的设置是否正确。
STM32学习笔记——之USART2篇USART2位于APB1总线学习环境:STM32芯片:STM32F103VBT6开发板:万利STM3210B-LK1USART2引脚PD5——USART2 TX,PD6——USART2 RX (重定义引脚)1、USART2与PC通信(USART2发送)首先需要对USART2配置,因为在万利板子上的USART2进行了重映射,因此配置跟USART1有区别①开启GPIOD以及AFIO时钟,开启USART2时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //USART2在APB1总线②配置USART2的TX(PD5)以及RX(PD6)引脚先进行定义结构体变量,用来配置相应引脚的速度以及输入输出模式GPIO_InitTypeDef GPIO_InitStructure;进行USART2的重映射配置GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE); //USART2重映射配置USART2的RX(PD6)引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOD, &GPIO_InitStructure);配置USART2的TX(PD5)引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOD, &GPIO_InitStructure);③配置USART1的波特率、数据位数、停止位、校验以及硬件流控制首先定义结构体变量USART_InitTypeDef USART_InitStructure;USART_ART_BaudRate = 9600; //波特率--9600USART_ART_WordLength = USART_WordLength_8b; //数据位数--8位USART_ART_StopBits = USART_StopBits_1; //停止位—1位USART_ART_Parity = USART_Parity_No; //无校验USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控制USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);④使能USART1USART_Cmd(USART1, ENABLE);通过上面四个步骤的操作,即可完成对USART2的配置。
STM32串口设计实验小结概述本文记录了基于S TM32的串口设计实验的相关内容,通过该实验,我们探索了ST M32串口通信的基本原理和应用。
引言串口通信是一种常见的通信方式,通过串口可以实现与外部设备的数据交互。
在嵌入式系统中,使用串口进行与P C或其他设备的通信非常常见。
本实验旨在通过使用ST M32单片机与上位机之间进行串口通信,深入理解串口通信的原理和实现方法。
实验目的本实验旨在:1.理解ST M32的串口通信工作原理;2.学习串口通信协议及其相关参数设置;3.掌握ST M32H AL库的使用方法;4.设计一个简单的串口通信系统。
实验器材和预备知识实验器材-S TM32F系列开发板(如S TM32F103C8T6)-U SB转串口模块-电脑预备知识-C语言编程基础-S TM32及H AL库的基本使用方法实验过程步骤一:环境搭建在开始实验之前,我们需要完成以下准备工作:1.安装Ke il MD K软件并注册;2.利用ST M32C ub eMX生成S TM32的工程,并配置串口相关参数;3.链接ST M32开发板与电脑,并确保能够正常通信。
步骤二:代码编写编写代码是实验中的核心步骤,我们需要实现以下功能:1.初始化串口配置;2.接收上位机发来的数据,并进行处理;3.返回处理结果给上位机。
下面是一个示例代码,用于接收上位机发送的字符串,并将其原样返回给上位机:#i nc lu de"s tm32f1x x_h al.h"#i nc lu de<s td io.h>U A RT_H an dl eT yp eDe f hu ar t1;v o id Sy st em Cl oc k_C o nf ig(v oi d);s t at ic vo id MX_G PIO_In it(v oi d);s t at ic vo id MX_U SAR T1_UA RT_I ni t(voi d);i n tm ai n(vo id){H A L_In it();S y st em Cl oc k_Co nfi g();M X_G PI O_In it();M X_U SA RT1_UA RT_In i t();w h il e(1){u i nt8_tr ec ei vB uff e r[64];i f(H AL_U AR T_Re cei v e(&h ua rt1,re cei v Bu ff er,64,1000)==H AL_ O K){H A L_UA RT_T ra ns mit(&h ua rt1,re ce ivB u ff er,s tr le n((ch a r*)r e c e iv Bu ff er),1000);}}}v o id Sy st em Cl oc k_C o nf ig(v oi d){//系统时钟配置...}s t at ic vo id MX_G PIO_In it(v oi d){//GP IO初始化配置...}s t at ic vo id MX_U SAR T1_UA RT_I ni t(voi d){h u ar t1.I ns ta nc e=U S AR T1;h u ar t1.I ni t.Ba udR a te=115200;h u ar t1.I ni t.Wo rdL e ng th=U AR T_WO RDL E NG TH_8B;h u ar t1.I ni t.St opB i ts=U AR T_ST OP BIT S_1;h u ar t1.I ni t.Pa rit y=U AR T_PA RI TY_NO N E;h u ar t1.I ni t.Mo de=U AR T_MO DE_T X_RX;h u ar t1.I ni t.Hw Flo w Ct l=UA RT_H WC ONT R OL_N ON E;h u ar t1.I ni t.Ov erS a mp li ng=U AR T_OV E R SA MP LI NG_16;H A L_UA RT_I ni t(&hu a rt1);}步骤三:测试与验证将编写好的固件文件烧录进S TM32开发板,在电脑中打开串口调试助手,选择对应串口号和波特率进行连接。
stm32串口通信工作原理一、引言串口通信是一种常见的数据交换方式,在嵌入式系统中扮演着重要的角色。
本文将介绍s t m32单片机上串口通信的基本原理以及其工作流程。
二、串口通信概述串口通信是指通过串行通信接口,按照一定的协议和规则,将数据传输到另一个设备。
常用的串口通信接口有R S-232、R S-485和UA RT等。
三、s t m32串口通信的基本原理s t m32单片机具有多个串口外设,每个串口包含了发送和接收数据的功能。
串口的工作原理可以简述为以下几个步骤:1.配置串口参数在使用s tm32串口通信之前,需要先对串口进行配置。
包括波特率、数据位、停止位、校验位等参数的设定。
这些参数会影响数据的传输速率和可靠性。
2.发送数据当需要发送数据时,首先将待发送的数据写入发送缓冲区。
数据会按照之前设定的参数进行编码并传输出去。
发送完成后,会产生发送完成中断。
3.接收数据接收数据时,st m32单片机会将接收到的数据存储到接收缓冲区。
当接收缓冲区有数据时,会触发接收完成中断,应用程序可以读取缓冲区中的数据。
4.中断处理s t m32单片机支持中断功能,通过设置相应的中断使能标志位,可以实现在数据发送和接收过程中对中断的响应。
中断处理函数负责对中断进行处理,以确保数据的正确传输。
四、s t m32串口通信的工作流程下面将详细介绍s tm32串口通信的工作流程:1.配置串口参数:使用st m32提供的库函数,根据需求设置波特率、数据位、停止位和校验位等参数。
2.初始化串口:调用库函数进行串口初始化,包括G PI O引脚设置、时钟使能等。
3.发送数据:将待发送的数据写入发送缓冲区。
4.等待发送完成中断:等待发送完成中断的触发,表示数据发送完成。
5.接收数据:接收到数据后,存储到接收缓冲区。
6.判断是否有数据可读:检测接收缓冲区是否有数据可读。
7.读取数据:读取接收缓冲区中的数据。
8.中断处理:根据需要进行中断处理,如错误处理、数据处理等。
STM32串⼝详解01、USART的特点USART是通⽤异步收发传输器(UniversalAsynchronousReceiver/Transmitter),通常称作UART,是⼀种异步收发传输器,是设备间进⾏异步通信的关键模块。
UART负责处理数据总线和串⾏⼝之间的串/并、并/串转换,并规定了帧格式;通信双⽅只要采⽤相同的帧格式和波特率,就能在未共享时钟信号的情况下,仅⽤两根信号线(Rx和Tx)就可以完成通信过程,因此也称为异步串⾏通信。
全双⼯异步通信。
⼩数波特率发⽣器系统,提供精确的波特率。
可配置的16倍过采样或8倍过采样,因⽽为速度容差与时钟容差的灵活配置提供了可能。
可编程的数据字长度(8位或者9位);可配置的停⽌位(⽀持1或者2位停⽌位);可配置的使⽤DMA多缓冲器通信。
单独的发送器和接收器使能位。
检测标志:①接受缓冲器②发送缓冲器空③传输结束标志多个带标志的中断源。
触发中断。
其他:校验控制,四个错误检测标志。
通信结构02、USART简介2.1、数据传输模型2.2、帧结构串⼝异步通信需要定义的参数①起始位②数据位(8位或者9位)③奇偶校验位(第9位)④停⽌位(1,15,2位)⑤波特率设置带奇偶校验的数据为就是9位1.数据包串⼝通讯的数据包由发送设备通过⾃⾝的TXD接⼝传输到接收设备得RXD接⼝,在协议层中规定了数据包的内容,具体包括起始位、主体数据(8位或9位)、校验位以及停⽌位,通讯的双⽅必须将数据包的格式约定⼀致才能正常收发数据。
2.波特率由于异步通信中没有时钟信号,所以接收双⽅要约定好波特率,即每秒传输的码元个数,以便对信号进⾏解码,常见的波特率有4800、9600、115200等。
STM32中波特率的设置通过串⼝初始化结构体来实现。
3.起始和停⽌信号数据包的⾸尾分别是起始位和停⽌位,数据包的起始信号由⼀个逻辑0的数据位表⽰,停⽌位信号可由0.5、1、1.5、2个逻辑1的数据位表⽰,双⽅需约定⼀致。
单片机串口通讯实验报告实验报告:单片机串口通讯实验一、实验目的1.掌握单片机串口通讯原理和方法。
2.学习如何通过单片机与计算机进行串口通讯。
3.熟悉串口通讯的相关命令和编程方法。
二、实验原理串口通讯是一种数据交换的方式,通过串口可以将数据从计算机发送到单片机,也可以将数据从单片机发送到计算机。
在单片机中,常用的串口通讯方式有UART和USART。
串口通讯的基本原理是通过两根信号线(TX-发送线和RX-接收线)进行数据的传输。
在本实验中,我们将使用UART通讯方式,通过串口将单片机接收到的数据发送到计算机上,并将计算机发送的数据显示在液晶屏上。
三、实验器材1.STM32F103C8T6开发板一块2.杜邦线若干B转串口模块一块4.计算机一台四、实验步骤1.连接硬件设备:将STM32F103C8T6开发板通过USB转串口模块与计算机相连。
2.配置串口参数:在单片机开发环境中,选择正确的串口号和波特率参数。
3.配置中断优先级:为了确保串口接收中断能够正常工作,需要设置中断优先级。
4.编写程序代码:根据实验要求,编写单片机的串口通讯程序。
5.烧录程序代码:将编写好的程序代码烧录到单片机中。
6.运行程序:在计算机上打开串口调试工具,观察串口通讯是否正常。
五、实验结果通过实验,我们成功实现了单片机与计算机之间的串口通讯。
通过串口调试工具,我们可以在计算机上看到从单片机发送过来的数据,并且可以通过计算机发送数据,从而在液晶屏上显示出相应的结果。
六、实验分析1.串口通讯是一种较为常见且灵活的数据传输方式,能够满足很多实际需求。
2.在编写串口通讯程序时,需要根据具体的芯片和开发环境进行相应的配置。
3.在使用串口调试工具时,需要注意选择正确的串口号和波特率,否则无法正常进行通讯。
4.串口通讯可以在许多领域进行应用,如物联网、机器人控制等。
七、实验总结通过本次实验,我学习到了单片机串口通讯的基本原理和方法,了解了UART通讯方式的具体实现。