DELMIA机器人仿真教程
- 格式:ppt
- 大小:5.25 MB
- 文档页数:74

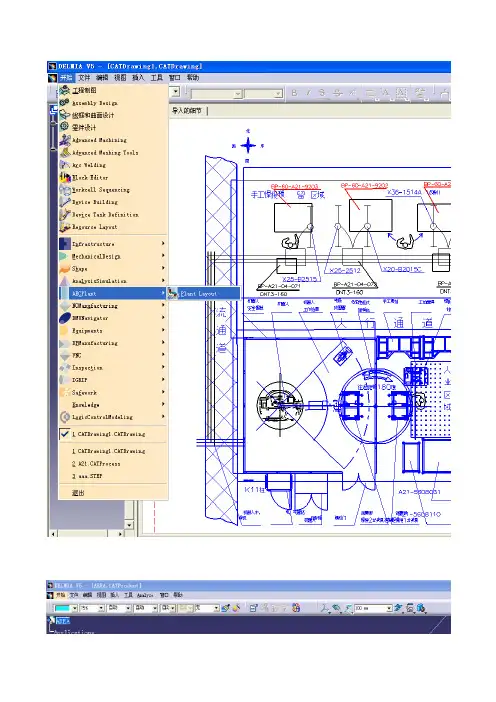
点击选平面布置图导入
第一步:制作平面布置图
第二步:将机器人各轴机制约束
运用此按钮做工具点制作IK机器人
机器人工具端零件
机器人工具点
机器人参照零部件一般和BASE选择同一个或直接放弃机器人的BASE
机器人中的尽量不要设置太多
检验机器人
回转台制作NEW HOME
第三步:加载所有所需资料第四步:调整目录树
进行装配
删焊钳和机器人抓取命令
建立父子关系
接受转台发出的信号
建立焊接关系网
建立相应关系,并保存
对应加载信号源
加载资源任务
创建任务
添加资源
添加已有的资源和任务
要机器人和夹具一起动必须先添加已有的资源和任务将两个任务连接起来
加载机器人任务
自动建立机器人任务
点符号在点机器人再点焊点。


Delmia机器人仿真编程第3节导入2D布局图CAD布局图可以导入Delmia仿真项目中,作为资源位置摆放参考。
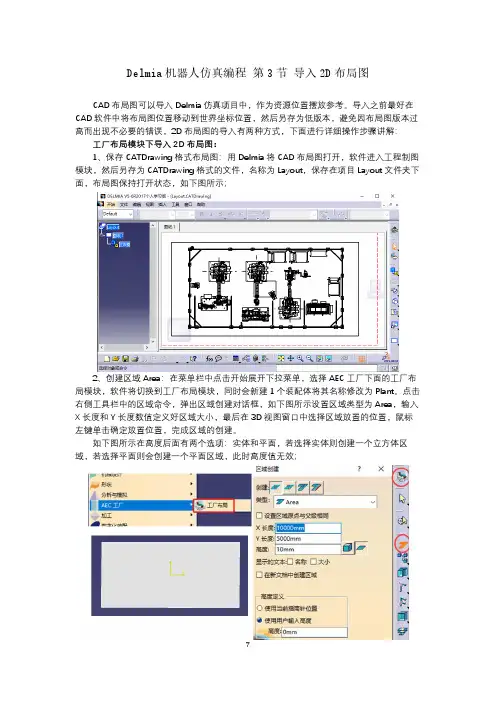
导入之前最好在CAD软件中将布局图位置移动到世界坐标位置,然后另存为低版本,避免因布局图版本过高而出现不必要的错误,2D布局图的导入有两种方式,下面进行详细操作步骤讲解:工厂布局模块下导入2D布局图:1、保存CATDrawing格式布局图:用Delmia将CAD布局图打开,软件进入工程制图模块,然后另存为CATDrawing格式的文件,名称为Layout,保存在项目Layout文件夹下面,布局图保持打开状态,如下图所示;2、创建区域Area:在菜单栏中点击开始展开下拉菜单,选择AEC工厂下面的工厂布局模块,软件将切换到工厂布局模块,同时会新建1个装配体将其名称修改为Plant。
点击右侧工具栏中的区域命令,弹出区域创建对话框,如下图所示设置区域类型为Area,输入X长度和Y长度数值定义好区域大小,最后在3D视图窗口中选择区域放置的位置,鼠标左键单击确定放置位置,完成区域的创建。
如下图所示在高度后面有两个选项:实体和平面,若选择实体则创建一个立方体区域,若选择平面则会创建一个平面区域,此时高度值无效;3、链接2D布局图:在模型树上选择刚创建的区域,单击鼠标右键,选择附加工程制图视图命令,然后切换到2D布局图窗口,选择布局图中任意线条,窗口将自动切换回工厂布局模块,随之2D布局图也被链接到区域Area,调整Area的位置使整个布局图放置在区域中,如下图所示;至此工厂布局模块下导入2D布局图完成,点击保存命令,将此包含2D布局图的装配体文件保存到项目Layout文件夹下面。
资源布置模块下导入2D布局图:1、创建资源节点:在装配设计模块下新建一个空白装配体文件并保存,作为项目的总资源节点,然后将软件切换到MSD模块,点击插入资源命令将刚创建的装配体文件加载进来,然后点击在PPR中创建资源命令,弹出添加资源对话框,选择资源类型为Area并输入资源名称,点击确定按钮,完成资源节点的创建,按图中序号依次操作;2、定义足迹:将软件模块切换到资源布置模块,然后选中新建的Area类型资源节点Plant,然后点击工具栏中定义足迹命令,弹出编辑足迹对话框,选中显示足迹复选框使地板显示出来,这样2D布局图链接后才会显示,按图中序号依次操作;3、链接2D布局图:在进行此操作之前需确保CATDrawing格式2D布局图是打开状态。
仿真规程2013.4.221.仿真的概念功能:设备的动作、时序、节拍;目的(售前阶段):方案可行性分析、动作演示;目的(设计阶段):找到设计/布局/方案中的问题,并做相应修正;2.软件平台设计阶段:DSS.Delmia3.工作流程S1:仔细阅读布局图、方案说明书、技术协议等;●根据要求,准备资料,计划时间等。
●掌握客户对功能、节拍、工艺等需求;●掌握主要设备组成;●整理外购件设备性能和参数说明书;●了解加工工艺知识;●对不明之处,与团队沟通;●与团队内其他人员沟通,掌握所需材料的获得时间;●合理安排进度;S2:建立仿真的文件夹目录结构自制设备编号命名必须依照机械设计课的任务书!外购设备命名使用英语或代码,不得用汉语或拼音!仿真主文件CATProcess文件名称为:“Process_7位项目号_子系统代码(数字,如有)_6位日期(yymmdd)”S3:数模格式转换(1)请机械设计课设计人员提供数模前,根据数模中心,建议用于位置定义的坐标系;(2)请机械设计课设计人员必须提供STEP或CGR格式的文件;(3)在DELMIA中将STEP转成CATPart/CATProduct格式(如数模曲面复杂或不便转成CATPart,可转成CGR格式),并按照任务书规定命名(FAxxxxxyy);注意:数模属性中的名称也要按规定命名;设备数模文件插入新建装配体CATProdcut;CATProdcut命名成FAxxxxxyy_dev;将所有数模按以上方式准备好,待仿真时调用;自制设备命名前,必须向机械设计课获取定义号;S4:为必要的设备做运动关系要求先将一个设备内部有相对运动关系的parts分成两个components;固定不动部分命名成J0,第一关节运动部分J1,第二关节运动部分J2,以此类推;建立机构固定J0在components 间做相对运动关系joints;S5:将数模插入仿真文件Process有运动的工艺设备(如机器人)导入Resource,库中导入的设备需将其“实例”名按工位号命名(如R6);静态设备和加工对象导入Prodcut使用罗盘定位各个设备;每次设备改变位置后,必须用命令保存;S6:利用机器人示教功能,检查机器人工作最远和最近点可达性和姿态,调整和优化设备间相对位置;S7:利用Teach示教机器人路径;机器人的不同功能性路径段必须分成不同的Task程序,Task的命名为:“机器人名_动作功能”(如R6_unload)S8: 2D局图通过仿真,确定每个设备的最终外形尺寸和安装位置,然后绘制2D布局图;文件名称为:“layout_7位项目号_6位日期(yymmdd)”4.规则•建模•建立安装原点;•尽量简化数模,但同时保留关键轮廓信息;•动作•避免机器人奇异问题;•避免机器人关节极限;•避免工件和工具本身与机器人干涉;•避免管线缠绕;•布局•依据中心设备的布置原点,确定其它位置了;•机器人布置位置+/-5cm内可变;Note:●通过网络文件夹(Z:\10_FA部\01_项目\2013年项目\FA1xxxx\02_布局和仿真\02. 仿真)传递数模文件,方便团队协作。
基于D EL M IA /IGRIP 的工业机器人仿真张小江,高秀华,张永智(吉林大学机械学院,吉林长春130025Simulation of Indust rial Robot Based on D EL MIA/IGRIPZHANG Xiao -jiang ,G AO Xiu -hu a ,ZHANG Yong -zhi(College of Mechanical Engineering of Jilin University ,Changchun 130025,China摘要:介绍了D EL M IA 软件及其IGRIP 模块的性能.首次应用D EL M IA/IGRIP 软件实现了机器人的运动仿真.仿真结果表明:利用DEL M IA/IGRIP 实现机器人仿真是很方便、准确的,为机器人分析设计提供了可靠的依据.关键词:D EL M IA/IGRIP ;机器人仿真;轨迹规划中图分类号:TP242.3文献标识码:A文章编号:1001-2257(200702-0060-03收稿日期:2006-06-26Abstract :Introduced t he D EL M IA and it’s IG 2RIP.For t he first time ,robot simulation is achieved by D EL M IA/IGRIP.The result s of simulation are tasted t hat robot simulation based on DEL M IA/IGRIP is laborsaving and exact.The result are ben 2efit to ro bot design and analysis.K ey w ords :DEL M IA/IGRIP ;robot simula 2tion ;t rajectory planning0引言机器人仿真技术是计算机技术、机器人学和计算机图形学相结合的产物.借助于机器人的实体图形对机器人的运动进行仿真,可形象逼真地反映机器人工作运动的全过程,可以实现机器人机构和控制器的优化设计,规划出最优的运动轨迹.机器人的动态图形仿真对机器人的设计、制造、试验及其应用具有重要的指导意义.机器人仿真系统作为机器人设计和研究过程中安全可靠、灵活方便的工具,发挥着越来越重要的作用.目前,离线仿真在国内虽然有些初步研究,但实际应用很少.可以预见随着机器人在我国的大量应用,离线仿真技术的研究和应用不但迫在眉睫,同时它的成功研究和应用也将有广阔的市场前景.1 D EL MIA 及其IGRIPDEL M IA 集成解决方案在全球领先的企业与科研机构中得到广泛的应用.在航空航天、汽车、造船、重型设备、日用消费品等各个行业发挥着重要的作用.DEL MIA 公司系列软件以基于物理的虚拟设计与制造及虚拟机器人等模块表现最为优异.D EL 2M IA 软件在机器人应用仿真方面处于世界领先地位.D EL M IA 软件能显著降低人机时和工程准备时间,提高仿真的精度.DEL M IA/IGRIP 是专业机器人模拟软件,利用IGRIP 可快速和图形化地构造各种应用工作单元作业,同时DEL M IA/IGRIP 能很容易导入CAD 数据,自动碰撞侦测功能能避免破坏减小风险.不管是对单个机器人作业单元还是整个工厂生产线,IGRIP 都能提供相应的解决方案以提高制造质量、精度和效益.2机器人仿真在机器人仿真研究中,仿真系统由以下几部分构成:三维几何模型,运动计算,轨迹规划,运动图形仿真等.根据KU KA 240-2型机器人结构特点,机器人仿真步骤如下.2.1机器人任务的设定工业机器人一般有6个自由度,要实现机器人运动学的逆解是一项十分繁重的工作.D EL M IA/IGRIP 软件能成功解决这一困难.通过“Robot Off 2lineProgramming"模块中的“Import tag Group In 2fo"导入机器人路径中的各点.在“Robot Motion"对话框中的“Target Attributes"可看到机器人对应点・06・1机械与电子22007(2运动学逆解的各种解,DEL M IA/IGRIP 对这些逆解进行了奇异性分析,可从中选择恰当逆解.2.2机器人轨迹规划文中采用轨迹规划方法为抛物线插值.假定两端的过渡域具有相同的持续时间t a ,且具有大小相等方向相反的恒定加速度¨θ.要保证轨迹连续光滑,即要求抛物线的终点速度必须等于线性段的速度.机器人各关节运动速度经历3个阶段:机器人在第1阶段从初速度作匀加速运动,在2阶段作匀速运动,第3阶段作匀减速运动,直至角速度为0.为使机器人运动平稳,保证机器人在完成某项任务的加速度最小,文中采用的方法为:机器人运动过程中前一段作匀加速运动,后一段做匀减速运动,中间不经过匀速运动阶段(即机器人关节运动只经过第1,3阶段.这样能保证机器人完成同一项任务的加速度比中间有匀速运动的加速度小.在这种前提下则下列条件成立:θmax =2θt f,¨θ=4θt 2f文中选用的时间为4s ,在机器人的作业空间中选取了3个点,分别为tag1,tag2和tag3.2.3机器人防碰撞和干涉检测防碰撞检测的目的是分析机器人和周围环境可能出现的碰撞问题.干涉检测是分析机器人在工作过程中有可能出现的奇异性及速度加速度等超限问题.这是保证机器人能正常工作的必要条件.机器人的防碰撞检测问题比较复杂,在其设计中是一个非常棘手、但又必须妥善解决的问题.利用D EL M IA/IGRIP 的标准自动碰撞侦测功能允许用户生成多个碰撞和接近队列以避免碰撞,而且可由自动路径规划器,生成避碰机器人轨迹.可利用也可检测机器人速度和加速度超限问题,效率高,准确度好,解决了实际工作中的难题,使机器人碰撞问题在设计过程中得到有效的解决.在DEL M IA/IGRIP 环境中防碰撞检测的步骤是:在“Simulation Analysis Tools"工具栏中依次选择“碰撞检测(开启",对机器人进行碰撞检测;“A 2nalysis Configuration"中的“Device Settings"对机器人工具的速度加速度等进行检测;Analysis Con 2figuration"中的“Robot Settings"对机器人的线速度、角速度、线加速度和角加速度进行检测;然后选择“Check Clash"对机器人进行干涉检测.2.4运动学仿真分析根据机器人工作的特点,一般把机器人各关节的轨迹,机器人末端的轨迹和机器人末端的位姿作研究对象,创建测量曲线,进行运动学仿真分析.产生测量曲线的方法:点击“Simulation Analy 2sis Tools"中的“Data Readout ";在弹出窗口点击“Sensors"按钮,并选择相应的机器人;在弹出的“Sensor management"选择需要测量的曲线,如各关节的轨迹、机器人末端的轨迹、机器人末端的位姿等;对机器人进行仿真,在“SpreadSheet"得到需要测量的一系列数值,点击“Grap hics"便得到所要的各个曲线.我们也可以在“Customized curves"来绘制其它关系曲线.本文以KU KA240-2型搬运机器人为研究对象,对机器人的运动采用D ELMIA/IGRIP 进行了分析,得到机器人各关节的轨迹,如图1~图6所示,机器人末端的运动轨迹,如图7~图9所示,机器人末端的空间轨迹如图10所示.图1 1号关节轨迹图2 2号关节轨迹图3 3号关节轨迹图44号关节轨迹・16・1机械与电子22007(2图5 5号关节轨迹图6 6号关节轨迹图7X 轴方向的轨迹图8Y轴方向的轨迹图9Z 轴方向的轨迹图10机器人末端的空间轨迹从图中可以看出:机器人各关节在整个运动过程中的情况与所设定的初始条件吻合,整个曲线与各个工况运动一致.机器人末端的姿态一般用3×3的旋转矩阵来表示,DEL M IA/IGRIP 采用RP Y 方法,用这种方法,通过3个量就可以表示机器人的姿态.仿真结果如图11~图13所示.图11机器人末端旋转角图12机器人末端俯仰角图13机器人末端偏转角从DEL M IA/IGRIP 对工业机器人的仿真分析来看,我们很清楚地得到机器人关节空间的轨迹、机器人末端的空间轨迹及其姿态,并且利用D EL 2M IA/IGRIP 能避免机器人的碰撞.3结束语机器人的运动仿真是机器人技术的一个重要组成部分,机器人仿真也是机器人离线编程系统中十分重要的一环.应用DEL M IA/IGRIP 软件的建模仿真模块,成功解决了机器人在工作过程中无法直接观察空间运动状况的难题,是直观方便地进行机器人仿真的有益尝试.参考文献:[1]北京赛四达科技有限公司.DEL MIA 公司及虚拟制造解决方案[Z].2003.[2]朱世强,王宣银.机器人技术及其应用[M ].杭州:浙江大学出版社,2000.作者简介:张小江(1979-,男,吉林大学硕士研究生,研究方向为机器人仿真;高秀华(1946-,女,吉林大学教授,博士研究生导师,研究方向为机械设计与自动化.・26・1机械与电子22007(2。
第一章软件设置在进行仿真之前,建议完成培训阶段的DELMIA option设置(参考文件1-Option.pdf);第二章仿真流程2.12D布局图导入1、AutoCAD布局图纸导入DELMIA:AutoCAD的零点坐标系与DELMIA一致,为保证导入的布局图在DELMIA原点附近,建议将CAD图纸导入之前进行偏移,选取某一点作为布局图的参考;如下图,选择布局图左下角为0,0位置;2、偏移之后保存成较低版本dwg文件(如AutoCAD 2007),直接在DELMIA中打开,File->Open,然后保存成*.CATDrawing文件备用3、选择进入DELMIA->AEC Plant->Plant Layout模块,如下图所示,建立一Area对象,保存;4、切换至DELMIA->Resource Detailing->Resource Layout模块,创建Area对象的Foot Print;勾选“show Footprint”选型,OK。
5、同时打开布局图,点击“Attach Drafting View”,按照图示顺序选择对象,布局图关联到DELMIA环境;将Product文件保存,然后插入到Resource节点;备注:为了后续方便机器人和设备精确布局,可以结合CATIA草图模块,选取布局图机器人基座中心点,创建一组圆柱特征;2.2机器人模型导入根据布局图,切换至DELMIA->Resource Detailing->Device Task Definition模块,选择catalog方式选择机器人型号并插入机器人模型,通过Snap命令将机器人精确定位;2.3三维数据导入1、选择从供应商提供的以工位为单位的焊枪及夹具设计数据,如下图为3dxml轻量化格式文件,直接打开并建立同名文件夹,保存相关数据在本地;2.4车身焊点建立1、焊点类型:车身焊点数据需要基于STEP格式或者CATIA设计数据创建,在3D模型中以多种形式存在,几何球型或者几何点+线段表示,如下图所示;1)点代表焊点的位置,线段代表焊点的方向;2)球型焊点和一个坐标轴系2、将某工位数据车身数据插入到Product节点下,建立Tag group,如下图所示;3、建立第一个焊点,如下图所示步骤,把罗盘Z轴吸附到线段上,以绿色显示,此时可以拖动罗盘移动至球的中心,同样也可以转动XY平面,OK即可创建第一个焊点;依次可以创建该工位的所有焊点结果如下所示:(注:焊点导出)为了便于使用轻量化数据进行仿真,焊点数据也可以先导出到外部Excel 文件中,然后再导入到仿真场景中;2.5焊枪/库建立1、DELMIA将STEP格式焊枪模型打开,另存为Product和Part文件;2、确定动臂和静臂各组件;3、切换到Device Building工作台,新建一个Component类型,将静臂部分全部移动到新的组件里面;4、然后依次将静臂部分固定(Fix),动臂各组件刚性连接(rigid joint),建立运动机构;5、机构定义完成之后,创建焊枪TCP点和Base点;6、定义焊枪的特殊状态(Home Position):关闭、工作(考虑车身件厚度,TCP点偏移静臂焊枪头2mm)小开,大开;7、焊枪入库:新建Catalog文件,建立C型和X型枪分类,然后将建好机构的焊枪添加到库中,便于重复调用;可以事先建立常用焊枪库,也可逐步添加;2.6焊枪位置分析1、2.1~2.3节将准备好的数据资源导入到DELMIA环境中;2、项目数据文件中,车身、焊枪和夹具都是在车身数据坐标系下完成的装配,本节开始前最好是按照布局图,将位置调整好;4、在方案设计阶段,夹具和机器人的位置都存在变化,要逐个焊点对经验选择的焊枪进行验证,可以使用手动焊枪选型的命令;a)执行手动焊枪选型命令,选择该工位上使用的焊枪,然后选择要分析的焊点,罗盘自动吸附到焊点上,TCP点和Tag点的坐标系重合;b)此时可以转动绿色的罗盘,绕Z轴旋转(焊点的位置和Z轴方向不能改变,因此只能绕Z轴旋转);调整好焊枪的位置与夹具和工件都不发生干涉,点击Save Position即可保存当前焊枪的焊接姿态;c)下图所示为焊枪和夹具发生干涉,通过旋转Z轴方向可以避开干涉,如果没有办法避开干涉,就需要修改夹具夹头的结构或者位置;2.7机器人可达性分析经过焊枪手动选型之后,如果基本上能够排除掉焊枪和工件的干涉,那么接下来可以添加机器人任务,检查机器人可达性;a)通过Set tool命令将焊枪关联到对应的机器人上;b)Add tag命令将当前焊枪对应要焊的焊点添加到机器人Task;c)使用Reach命令,初步分析机器人的可达性,如果不可达或者机器人关节超出极限位置,分析结果直接显示为out of limit或unreachable;d)如果是unreachable,那么需要稍微调整机器人的位置;机器人基座高度200mm,300mm,500mm,700mm等e)接下来,teach示教逐个检查每个焊点的可行性,检查机器人的姿态;重复操作,实现所以焊点可达可焊;2.8 机器人经过点插入1、机器人示教完成之后,可以调整打点的顺序,然后增加进枪、出枪的经过点(Via Point );下图示为机器人可达性调整好的任务,可以通过右侧‘箭头’调整打点顺序。
DELMIA仿真教程DELMIA仿真教程
1:概述
1.1 简介
1.2 目标与范围
1.3 术语与定义
2: DELMIA仿真基础
2.1 DELMIA仿真的优势
2.2 DELMIA仿真的应用领域
2.3 DELMIA仿真软件的安装
3: DELMIA仿真环境介绍
3.1 DELMIA仿真界面
3.2 DELMIA仿真工作区
3.3 DELMIA仿真工具栏
3.4 DELMIA仿真属性栏
4:创建工作站
4.1 创建工作站的步骤
4.2 设置参数
4.3 定义的关节和运动范围 4.4 定义末端工具
4.5 设定的姿态和路线
5:程序仿真
5.1 创建程序
5.2 编辑程序
5.3 程序的调试与优化
5.4 程序仿真的注意事项6:碰撞检测与路径规划
6.1 碰撞检测的原理
6.2 碰撞检测的设置与运行 6.3 路径规划的原理
6.4 路径规划的设置与运行7:运动仿真与分析
7.1 运动仿真的原理
7.2 运动仿真的设置与运行
7.3 运动仿真结果的分析与评估
8:仿真结果的导出与报告
8.1 导出仿真结果的文件格式
8.2 创建仿真报告的步骤
8.3 仿真报告的内容与格式要求
附件:
本文档附带的文件包括示例工程、参数表格、路径规划结果图等。
法律名词及注释:
1:仿真:使用计算机技术模拟工作的过程。
2: DELMIA:由达索系统公司开发的3D数字制造解决方案软件。
3:碰撞检测:在运动过程中,检测与其他物体之间是否发生
碰撞。