静平衡的实用计算法
- 格式:pdf
- 大小:624.27 KB
- 文档页数:3
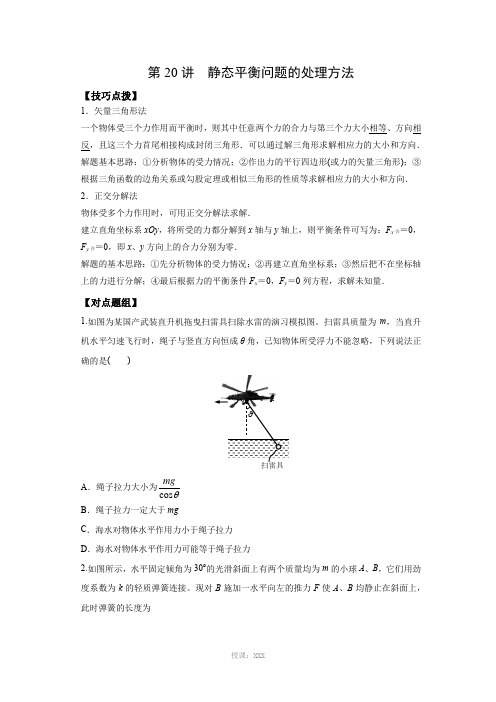
第20讲静态平衡问题的处理方法【技巧点拨】1.矢量三角形法一个物体受三个力作用而平衡时,则其中任意两个力的合力与第三个力大小相等、方向相反,且这三个力首尾相接构成封闭三角形.可以通过解三角形求解相应力的大小和方向.解题基本思路:①分析物体的受力情况;②作出力的平行四边形(或力的矢量三角形);③根据三角函数的边角关系或勾股定理或相似三角形的性质等求解相应力的大小和方向.2.正交分解法物体受多个力作用时,可用正交分解法求解.建立直角坐标系xOy,将所受的力都分解到x轴与y轴上,则平衡条件可写为:F x合=0,F y合=0,即x、y方向上的合力分别为零.解题的基本思路:①先分析物体的受力情况;②再建立直角坐标系;③然后把不在坐标轴上的力进行分解;④最后根据力的平衡条件F x=0,F y=0列方程,求解未知量.【对点题组】1.如图为某国产武装直升机拖曳扫雷具扫除水雷的演习模拟图。
扫雷具质量为m,当直升机水平匀速飞行时,绳子与竖直方向恒成θ角,已知物体所受浮力不能忽略,下列说法正确的是()A.绳子拉力大小为cosmgB.绳子拉力一定大于mgC.海水对物体水平作用力小于绳子拉力D.海水对物体水平作用力可能等于绳子拉力2.如图所示,水平固定倾角为30°的光滑斜面上有两个质量均为m的小球A、B,它们用劲度系数为k的轻质弹簧连接。
现对B施加一水平向左的推力F使A、B均静止在斜面上,此时弹簧的长度为θl ,则下列说法正确的是( )A .推力FB .推力FC .弹簧原长为lD .弹簧原长为l 3.如图所示,两轻弹簧a 、b 悬挂一小铁球处于平衡状态,a 弹簧与竖直方向成30°角,b 弹簧水平,a 、b 的劲度系数分别为k 1、k 2,则a 、b 两弹簧的伸长量x 1与x 2之比为( )A B C D 4.如图所示,用完全相同的轻弹簧A 、B 、C 将两个相同的小球连接并悬挂,小球处于静止状态,弹簧A 与竖直方向的夹角为37o (sin37o =0.6),弹簧C 水平,则弹簧A 、C 的伸长量之比为( )A .4:3B .3:4C .5:3D .3:55.如下图所示,质量分别为m A 、m B 的A ,B 两个楔形物体叠放在一起,B 靠在竖直墙壁上,在力F 的作用下,A ,B 都始终静止不动,则( )A .墙壁对B 的摩擦力大小为(m A +m B )gB .A 、B 之间一定有摩擦力作用C .力F 增大,墙壁对B 的摩擦力也增大D .力F 增大,B 所受的合外力一定不变【高考题组】6.(2012·广东高考)如图所示,两根等长的轻绳将日光灯悬挂在天花板上,两绳与竖直方向的夹角都为45°,日光灯保持水平,所受重力为G ,左右两绳的拉力大小分别为( )A .G 和GB .2G 和2C .12GD .12G 和12G 7.(2010·宁夏)如下图所示,一物块置于水平地面上.当用与水平方向成60°角的力F 1拉物块时,物块做匀速直线运动;当改用与水平方向成30°角的力F 2推物块时,物块仍做匀速直线运动.若F 1和F 2的大小相等,则物块与地面之间的动摩擦因数为( )A 1B .2C 12-D .1-8.(2012·浙江高考)如图所示,与水平面夹角为30°的固定斜面上有一质量m =1.0 kg 的物体。

静平衡与动平衡1. 质量中心(质点定义)此点周围的静态质量力矩为零。
可用下列关系表示:m r i i∑=0 式中,i m --各部分质量,i r --每部分质量与质点之间的距离矢量。
计算实例:我们可看出:1132575gr mm m r ==⋅⋅⨯2217575 gr mm m r ==⋅⋅⨯2. 惯性轴(定义)围绕其周围质量力矩之和为零的一条直线。
根据定义可得出如下公式:m r i i∑=0 式中,i m --各部分质量,i r --各部分质量与惯性轴的垂直距离。
从惯性轴的定义可得出惯性轴与不平衡量的如下关系:如果一物体的惯性轴与旋转轴是重叠在一起,则此物体的不平衡量为零。
也就是说当一物体的质量平均分布在旋转轴也就是惯性轴的周围,则此物体处于平衡状态。
3. 不平衡量的定义质量在旋转轴周围分布不均。
当一个旋转件的质量没有均匀的分布在旋转轴周围,就产生了不平衡量。
从这个定义可清楚看出没有确定旋转轴,不平衡量就无从谈起。
此旋转轴只是质量均匀分布在其周围的假设中的一根轴。
如下图所示:平衡位置 不平衡位置 每个转子可分成很多不同的部分(垂直旋转轴的方向),每个部分有自己单独的不平衡量,我们将局部不平衡量(每个部分的)的表达式定义如下:j j i r m U ⋅=∑式中,i U --i 部分的不平衡量(用垂直旋转轴方向的矢量来表示),j m --I 部分每个足够小的块的质量,j r --每小块与旋转轴之间的距离,符号∑表示矢量的叠加。
从每部分的不平衡量的定义可清楚看出不平衡量是静态质量根据与旋转轴之间的距离计算出来的力矩。
总不平衡量是局部不平衡量之和,可用下述数学公式表示:{}i t U U =旋转体的不平衡量可看作是垂直旋转轴各自平行截面的不平衡量的矢量之和。
旋转轴旋转轴即上式中,t U --总不平衡量,i U --相互平行截面的不平衡量。
上图所指的每个矢量可看作旋转体单个截面的不平衡量。
4. 静不平衡量(定义)如果不平衡量完全等同一个矢不平衡量,其矢不平衡量与转子质点所处同一截面(惯性轴平行旋转轴)。

【关键字】平衡第四讲机械的平衡一、刚性转子的静平衡计算(1)静不平衡转子:对于轴向尺寸较小的盘状转子(即轴向宽度b 与其直径D 之比b/D < 0.2的转子),其质量可以近似认为分布在笔直于其回转轴线的同一平面内。
若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。
由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子(2)静平衡及其条件:对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。
静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。
静平衡条件表达:形式一:力条件:形式二:质径积条件:(3)静平衡的计算:即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。
对于静不平衡的转子,无论有多少个偏心质量,只需进行单面平衡。
例1 图示盘形回转件上存在三个偏置质量,已知,,,,,,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡?解:与共线,可代数相加得方向同平衡条件:所以依次作矢量,封闭矢量即所求,如图示。
例1图解例2 图示盘状转子上有两个不平衡质量:kg,,,,相位如图。
现用去重法来平衡,求所需挖去的质量的大小和相位(设挖去质量处的半径)。
解:不平衡质径积静平衡条件解得例14-2图应加平衡质量挖去的质量应在矢量的反方向,处挖去质量。
例2图解二、刚性转子的动平衡计算(1)动不平衡转子:对于轴向尺寸较大的转子(即b/D ≥0.2的转子),其质量不可以近似认为分布在笔直于其回转轴线的同一平面内,而往往是分布在若干个不同的回转平面内。
这种不平衡现象只有在转子运转的情况下才能显示出来,故称其为动不平衡转子。
(2)动平衡及其条件对于动不平衡的转子,为使转子在运转时其各偏心质量产生的惯性力和惯性力偶矩同时得以平衡。
需在选择两个平衡基面,并适当地各加一平衡质量,使两平衡基面内的惯性力之和分别为零,这个转子便可得以动平衡。

动静平衡原理及平衡方法动、静平衡原理是物理学中的重要概念,用于描述物体或系统在力的作用下保持平衡的原理。
在日常生活中,我们会遇到很多需要平衡的情况,如平衡家具的腿、平衡自行车、平衡体内的液体等等。
了解动、静平衡原理及平衡方法,可以帮助我们更好地理解和解决这些问题。
动平衡原理是指物体在作用于它的力矩为零时保持平衡。
力矩是描述力对物体产生转动效果的物理量,可以通过力与力臂的乘积来计算,力臂是表示力作用点与物体旋转轴之间的垂直距离。
简单来说,当物体所受到的合外力的力矩为零时,物体将保持动平衡。
静平衡原理是指物体在作用于它的合外力和合外力矩为零时保持平衡。
和动平衡类似,静平衡也是通过力和力矩的平衡来实现的。
当物体所受到的合外力和合外力矩均为零时,物体将保持静平衡。
平衡方法主要包括平衡力的调节和分配、平衡物体的调节和分配两个方面。
平衡力的调节和分配是指通过调节作用在物体上的力的大小和方向来实现平衡。
例如,当一个悬挂在绳上的物体产生倾斜时,我们可以通过施加一个与重力垂直的力来调节物体的平衡。
这个力的大小和方向将会影响物体的平衡状态,只有当力的大小和方向能够抵消物体的重力矩时,物体才能平衡。
平衡物体的调节和分配是指通过调整物体本身的质量分布和形状来实现平衡。
例如,当一个家具的腿不平衡时,我们可以通过调整腿的长度或在腿的底部添加垫子来实现平衡。
调节腿的长度可以改变家具受力的点,从而调整力矩的大小和方向,从而实现平衡。
除了调节力和物体本身以外,还可以利用其他物体来实现平衡。
这就是我们常说的"平衡原理"。
例如,在建筑物的建造过程中,可以通过在楼顶放置重物来抵消风力的作用,从而实现平衡。
在天平上,我们可以通过在一个盘子上放置物体来调节平衡。
总结起来,动、静平衡原理及平衡方法是物理学中的基本概念,可以应用于生活和工程实践中。
通过理解和掌握这些原理和方法,我们可以更好地解决平衡问题,确保物体或系统在力的作用下保持平衡。

静平衡的实用计算法
张玲
【期刊名称】《甘肃冶金》
【年(卷),期】2005(027)001
【摘要】本文介绍了四点计算法进行静平衡的简单实用的工艺方法.
【总页数】3页(P61-62,70)
【作者】张玲
【作者单位】酒泉钢铁集团公司,职工大学,甘肃,嘉峪关,735100
【正文语种】中文
【中图分类】TH123+.1
【相关文献】
1.荷重仪法转子中心体静平衡 [J], 罗丰
2.悬吊式平衡法在砂轮静平衡中的应用 [J], 赵兴仁;邵长春
3.三支点压力传感器称重静平衡法试验误差分析实例 [J], 李友平;李建斌
4.三支点压力传感器称重静平衡法试验误差分析实例 [J], 李友平;李建斌
5.利用秒表法找转子静平衡 [J], 张鸣
因版权原因,仅展示原文概要,查看原文内容请购买。
静力平衡法一、基本概念1. 定义- 例如,一个静止在水平桌面上的物体,它受到重力和桌面的支持力,这两个力大小相等、方向相反,物体处于静力平衡状态。
2. 适用条件- 适用于研究处于静止或匀速直线运动状态(即平衡状态)的物体或结构体系。
在工程力学、建筑结构分析等领域广泛应用。
- 比如分析桥梁结构在静止时各个部分的受力情况,或者是静止的建筑物基础的受力等。
二、相关物理量与定律1. 力的合成与分解- 例如,有两个力F1和F2作用于一点,它们的合力F的大小和方向可以通过以F1和F2为邻边作平行四边形,对角线就是合力F;或者将F1和F2首尾相接,从F1的起点指向F2的终点的向量就是合力F。
- 力的分解是力的合成的逆运算,同样遵循平行四边形定则。
可以根据实际问题的需要,将一个力分解为不同方向的分力。
2. 牛顿第二定律在静力平衡中的特殊情况- 对于一个物体受到多个力F1、F2、F3…作用时,有F1+F2+F3+… = 0。
这个矢量方程可以转化为在直角坐标系下的分量方程,即∑Fx = 0和∑Fy = 0(如果是三维问题还有∑Fz = 0)。
三、解题步骤1. 确定研究对象- 明确要分析其受力情况的物体或结构部分。
例如在分析一个由多个杆件组成的框架结构时,可能先选择其中一根杆件作为研究对象。
2. 受力分析- 画出研究对象所受的所有外力,包括重力、弹力、摩擦力等。
要注意按照力的实际作用点和方向准确画出。
- 比如一个斜面上静止的物体,它受到重力(作用在物体的重心,竖直向下)、斜面的支持力(垂直于斜面向上,作用在物体与斜面的接触点)和摩擦力(沿斜面向上,作用在接触面上,如果物体有相对斜面运动的趋势)。
3. 建立坐标系- 根据物体的受力情况和问题的特点,建立合适的直角坐标系。
通常选择使尽可能多的力与坐标轴重合或平行的方向建立坐标系,这样可以简化计算。
- 例如对于一个在斜面上的物体,常常以斜面方向为x轴,垂直斜面方向为y 轴建立坐标系。
动平衡静平衡计算公式
静平衡计算有两种方法:
质量平衡法和力平衡法。
质量平衡法是根据每一个物体的质量来衡量
其运动,而力平衡法则是根据每一物体受到的外力的大小来衡量其运动,
这两种方法可以有效地计算出静平衡状态的平衡量。
质量平衡法
质量平衡法的计算公式为:
M=F
其中,M为物体的质量,F为物体受到的力。
力平衡法
力平衡法的计算公式为:
F=M*a
其中,F为物体受到的力,M为物体的质量,a为物体受到的加速度。
动平衡的计算公式主要有两种:
一种是动平衡力计算公式:
F=mv2/r
其中,F为动平衡力,m为物体的质量,v为物体的速度,r为物体的
转角半径。
另一种是动平衡角度计算公式:
θ=mv2/T
其中,θ为动平衡角度,m为物体的质量,v为物体的速度,T为物体受到的拉力和杆力的绝对值的和。
上述两种公式可以有效地计算出物体在动态平衡状态的力量和角度。
第27卷第1期2005年3月甘 肃 冶 金GANS U M ETALLURGYV o.l27 N o.1M ar.,2005文章编号:1672 4461(2005)01 0061 02静平衡的实用计算法张玲(酒泉钢铁集团公司职工大学,甘肃嘉峪关735100)摘 要:本文介绍了四点计算法进行静平衡的简单实用的工艺方法。
关键词:静平衡;四点计算法;平衡架;偏重中图分类号:TH123+.1 文献标识码:B1前言对旋转机械的转动部件进行静、动平衡校正,是减少不平衡离心惯性力,使机器运转平稳的一种工艺方法。
由于生产现场条件的限制,在生产实际中经常采用静平衡,对于长径比小于5的高速转子,有时可以用精密静平衡代替动平衡。
目前,静平衡常用的八点法在操作中有许多缺点,特别是在用精密静平衡取代动平衡的校正工作中更为突出。
因摩擦力的存在,转子轴径及平衡导轨精度和粗糙度的差异,转子有时停住的最低点并不是偏重位置。
八点法计算时,数值理论上应组成一条光滑的正弦曲线,但最大与最小的位置本身就是未知数,它们不可能与实际操作中所设的八点巧合。
因此,在操作中,需要反复摸索,试加配重,逐渐靠近,又因配重点多,在去重或配重时计算误差大。
另外,在平衡后用两倍转子允许的重径积作残存值检验,因摩擦力的影响,均不能正确判断是否达到平衡要求,也反映不出残存值大小。
下面介绍一种四点计算法,四点计算法是求得转子任意对称4点在发生微转动时的加重量的大小和方位,进而用去重或配重完成平衡作业。
2计算方法和公式将转子安置于导轨平衡架上,见图1。
在转子的圆周上取任意对称4点,1、2、3、4。
1和3点位于X轴上,2和4点位于Y轴上。
又令W位于如图的1、4相限,与4点的夹角为 。
如果依次将1-3、2 -4转到水平位置,然后在该点切向加重,直至在该位置微动同一小距离,既转子进入滚动临界状态,将得到4个位置的加重值W1、W2、W3、W4,见图2。
图1 转子安置示意图图2 转子微动加重示意图因为转子转动摩擦力矩M是与转动方向相反,所以根据图2列出以下4个位置的平衡方程式如下:W1 R+W X-M=0①W3 R-W X-M=0②W2 R-W Y-M=0③W4 R+W Y-M=0④其中M为常数,即在同一条件进入同一状态,将①~④式相加得:M=R(W1+W2+W3+W4)/4令M=Q R,则:Q=(W1+W2+W3+W4)/4⑴式中:Q-圆周摩擦力,等于4点所加重量代数和的平均值。
将M=Q R代入①~④式中得:W1 R+W X=Q R⑤W3 R-W X=Q R⑥W2 R-W Y=Q R⑦W4 R+W Y=Q R⑧分析⑤~⑧式得:W1=Q-W X/R,W1<Q,W1为小值;W3=Q+W X/R,W3>Q,W3为大值;W2=Q+W Y/R,W2>Q,W2为大值;W4=Q-W Y/R,W4<Q,W4为小值;W1+W3=W2+W4=2Q因假定偏重W位于1~4相限,反之可得这样的结论:4个加重值中必有两个大值和两个小值,位于同相两侧;偏重必位于两小值所夹相间,对应两值的代数和相等(如果偏重 Q,小值可能为负值)。
根据⑥、⑦两式得:W X=R(W3-Q)W Y=R(W2-Q)等式两边分别平方得:W2 X2=R2(W3-Q)2⑨W2 Y2=R2(W2-Q)2⑩⑨+⑩得:W2(X2+Y2)=R2[(W3-Q)2+(W2-Q)2]又因(X2+Y2)=R2,所以得:W=(W3-Q)2+(W2-Q)2⑵同理根据⑤、⑧两式得:W=(Q-W1)2+(Q-W4)2⑶从⑵和⑶可得另一结论:偏重值W的平方等于两大值与圆周摩擦力之差的平方和,或圆周摩擦力减去两小值的平方和。
又因Y=R cos 代入③式,得:cos =(W2-Q)/W⑷从⑷式可见偏重点与某小值夹角的余弦,等于该小值相对应的大值与圆周摩擦力之差与偏重值的商。
以W1、W2、W3、W44个加重值为已知,按⑴、⑵、⑶、⑷4个计算式就可能确定偏重量及其方位,然后去重或配重完成平衡。
不平衡残存值的检测,所加试重用下式确定:W试=Q-Gr/R⑸将W试在转子对称任意4点切向加上,仍使转子微动,可新得W 1、W 2、W 3、W 44个值,代入⑴、⑵式就可算出残存值。
3计算实例平衡对象:D-1600风机叶轮,G=2680kg,D =1860mm,L=456mm,N=1450r/m in,G r 900g c m(用精密静平衡代替动平衡)。
平衡设备:导规式静平衡架。
计算过程:⑴按上述方法测得对称4点微动时加重值,结果见表1。
若某点微动时,加重块要加在它的对称点者,则定为负值。
表1 4点微动加重值编 号1-W12-W23-W34-W4加重值(g)-2372138870-1507从数值分析可见:1、4为两小值点,偏重必位于1~4相间。
W1+W3=633g,W2+W4=631g,故所测数字是准确的。
⑵按式⑴、⑵、⑷计算偏重及方位:Q=(W1+W2+W3+W4)/4=[-237+2138+870+(-1507)]/4=316g,W=(W3-Q)2+(W2-Q)2=(2138-316)2+(870-316)2=1905g令偏重点与4点小值位置的夹角为 ,则:cos =(W2-Q)/W=(2138-316)/1905=0.9564查表得: =17 。
⑶按叶轮外圆作17 样板,从4点向1小值点移动17 ,既为偏重位置,用去重或在其对称点加重即可。
⑷按式⑸取试重进行残存值检验:W试=Q+G r/R=316+900/93=326g用W试对任意对称4点检测结果见表2。
(下转第70页)⑴砂、石料场用彩条布覆盖、石子场提前3天撒水降温。
⑵现场周围洒水降温,基坑壁洒水降温。
⑶缩短混凝土运输距离、增加运输车辆。
4.2 混凝土浇筑施工过程中混凝土浇筑采用斜面分层布料施工法,即 一个坡度分层浇筑、循序渐进、一次到顶 的浇筑方法。
振捣时从浇筑层的下端开始逐渐上移,混凝土接槎时间不超过水泥初凝时间,约2.5h (添加膨胀剂后,水泥初凝时间为3.5h ),以免形成施工冷缝。
浇筑顺序见图2。
图2 混凝土振动示意图4.3 混凝土浇注后的温度控制在混凝土终凝后,向管内注入50mm 左右的水并将温度计放入,每4h 观测记录一次,同时测量混凝土内部最高温度、混凝土表面温度和外界温度,并比较混凝土内部最高温度与混凝土表面温度之间、混凝土表面温度与外界温度之间的温差,直至内外温差 10 后方可拆除保温材料。
从中可以看出:混凝土浇筑后24~30h ,温度达到峰值(50 ),持续4~6h 后开始降温。
降温近月余才接近大气温度。
龄期-温度曲线是不对称于龄期轴线的近似抛物线,升温快(曲线陡),降温慢(曲线缓)。
此水泥水化热峰值比国内相应水泥提前48h 到来。
从温度测量记录看出:混凝土上部(距表面100mm 处)温度受大气影响不大,这是保温养护的结果。
大体积混凝土没有裂缝的原因是:混凝土降温慢,降温梯度小,温差收缩应力小;HEA 的早期微膨胀,使混凝土产生预应力;混凝土的徐变和塑性变形消除了部分收缩应力;混凝土强度以增长快,高出设计值、最终收缩应力小于混凝土的抗拉强度,使混凝土不产生裂缝。
5 结语规范要求大体积混凝土内外温度 25 。
因此,混凝土表面的温度应保持在24.3 以上即可。
为了降低水泥水化热引起绝热升温、防止混凝土内外温差过大造成裂缝,本工程中采用两层保温法来达到降温目的:即一层彩条布和一层草帘覆盖保温,其上始终蓄水湿润,直至混凝土内外温差小于10 ,方可拆除保温材料,然后进行洒水养护。
基础周围用M 5.0砂浆砌24砖墙,利于保温,防止了基础开裂,保证了大体积混凝土的施工质量。
收稿日期:2004 10 25作者简介:李 辉(1962 ),女,土建工程师。
(上接第62页)表2 4点检测结果对称点W 1'W 2'W 3'W 4'检测值(g)309312315311检验精度要求Q ='(309+312+315+311)/4=311g ,代入式⑵:W 残=(315-311)2+(312-311)2=17=4.1g<10g故符合精度要求。
4结语四点计算法静平衡适合于工作条件和设备有限,但又要求精密静平衡的校核工艺。
在做静平衡操作中,应注意以下事项:⑴计算的基础是4个加重值要准确,平衡前应检查轴径有无椭圆、毛刺、表面粗糙度,导规的光洁及水平。
在轴承座上直接做,应清洗轴承。
⑵转子微动前应停稳,然后轻轻放开,微动距离可参考下列数字,4点微动方向应一致,距离相等。
D>1500mm ,微动角为0.5 ~1 ;D <1500mm,微动角2 ~3 。
⑶4值测出后,应分析数值,找出两小值点,用检验式W 1+W 3=W 2+W 4检查。
如果对称值代数和差异较大,主要是轴颈有椭圆或毛刺,可转动一个角度,另设4点,重新测数值。
⑷所加配重应沿切线方向。
⑸此方法曾用于多台风机叶轮进行精密静平衡校核,实践证明比八点法快捷、方便且准确。
收稿日期:2004 10 22作者简介:张玲(1970 ),女,讲师,1993年毕业于武汉钢铁学院选矿专业。
一直从事本专业及相关机械、钳工技能鉴定等教学研究工作。