- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
n r f x f y f z 0
x y z
9
3) 虚位移与实位移区别与联系
1)真实位移: dri ri (t dt) ri (t)
其和中 约束ri 方必程须同时满f (t足, ri运, ri动)。微0 分方程及初始条件,
2)可能位移:
FA
A
PA
FA
A
C FC
21
光滑铰链
固定铰链支座
A
球铰支座约束
圆柱铰链
C
• 蝶形铰链约束
A
B
22
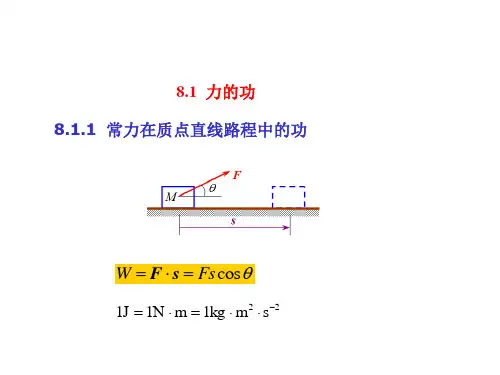
3. 虚功
定义 质点或质点系所受的力在虚位移上所作的功称为虚功
W
F
r
23
ri
ri (t dt) ri (t)
其中
ri
只须满足约束方程
f
(t,
ri
,
ri
)
0
,而
不必满足运动定律及初始条件。
10
由定义知:真实位移是可能位移之一。 真实位
移是唯一的,可能位移有无穷多个。
Pi
dri
Pi
ri1 ri 2 ri 3
Fi
Fi
• 若约束球面的半径随时间匀速增加,
即
R R0 vt
则约束方程为:
R+vt
x2 y2 z2 (R vt)2 0
17
举例4:滑块
稳定几何约束条件下,无限小的实位移是虚位移之一
18
2. 理想约束
1)定义 约束反力在质点系的任何虚位移中所作元功之和等于零,这
种约束称为理想约束.
r 图中质点M有一虚位移
,其坐标 由(x,y,z)变为(x+δx,
y+δy,z+δz)
有虚位移后,质点的坐标仍
满足约束方程
f (x+δx,y+δy,z+δz) =0
将上式泰勒展开,舍去高 于1阶的高阶微量后
f (x+δx,y+δy,z+δz) =
f (x, y, z) f x f y f z
FNi
质点mi 的合约束反力
ri
质点的虚位移
理想约束条件
FNi
ri
0
19
2)常见的理想约束
支持刚体的固定点
刚性杆
y A
M
不可伸长的绳 O
光滑面(曲线)约束
光滑铰链
x
B
A P
20
光滑面约束
固定平面 固定曲面
齿轮的齿面
PA
A 的分析方法来求解呢?
杠杆
平衡条件:
F1a F2b 0 (a)
——— 微小角度
s atg 1
s btg 2 4
由于在新的位置系统仍然平衡
F1S1 F2S2 0
(b)
条件(a)和条件(b)是等价的
杠杆的平衡条件可用作用力在平衡附近的微小位移中所 作的功来建立。
虚功原理 ~
西霞院反调节水库
1
教学要求:
• 教学目标: • 对理想约束和虚位移有清晰的认识,并会计算虚位移。 • 能正确地运用虚位移原理求解物体系的平衡问题。 • 对广义力和广义坐标形式的虚位移有初步的理解,并会
计算广义力。 • 本节重点: • 虚位移、理想约束的概念,应用虚位移原理求解物体系
的平衡问题。 • 本节难点: • 广义力的概念,广义坐标形式的虚位移原理。
请问,对于一般的非自由 质点系是否能写出类似的平衡 条 件呢?答案是肯定的。
6
二. 基本概念
1. 虚位移
1)虚位移定义 某瞬时,质点系在约束所允许的条件下,
可能实现的任何无限小的位移。
T平面----过M点的切面
该瞬时虚位移 r
切面上过M点的任何无限小位移
受固定曲面S约束的质点M
7
2)虚位移与约束关系
5
由此可见,物体的平衡条件,不仅可以通过外力矢量和为0和外 力矩矢量和为0判定,还可以通过位移、做功概念来表述,即判
断一个状态是否平衡可以通过在这个状态附近一个可能发生的过
程中外力的功的特征来判定。
平衡条件: F mg sin 0 (a)
设想平衡附近的微小位移,再次平衡
Fs mg sins 0 (b)
x y z
f x f y f z 0
x y z
8
用n表示曲面f (x,y,z) =0
在(x,y,z)点处的单位法向矢量
n
f C(
i
f
j
f
k)
r
x
y
xi yj zk
z
虚位移如何反映了约束的几何性质: 虚位移r垂直于曲面上该点处的法线, 也就是说虚位移r必在通过该点的曲 面的切平面上。
俯视图
俯视图
11
3)约束对可能位移(真实位移)的限制:
设质系受到几何约束
和微分约束
N a i (t, ri
)
f (t, ri vi a
) 0, 0,
i1
1,2,..., l 1,2,...,s
几何约束对可能位移的限制方程为
N
f
i1 ri
ri
f t
t
0,
1,2,..., l
微分约束对可能位移的限制方程为
N
a i (t, ri ) ri a t 0, 1,2,...,s
i1
12
4)虚位移:满足下面齐次线性方程的ri 的集合。
N
f
i1 ri
ri
2
一. 问题的提出 二. 基本概念
本
1. 虚位移
节 主 要
1)虚位移定义 2)虚位移与约束关系 3) 虚位移与实位移区别与联系 4)举例
2. 理想约束
内 容
1)理想约束定义 2) 常见的理想约束
3.虚功
三. 虚功原理
1.虚功原理表述
2.虚功原理证明
3. 广义坐标中的虚功原理
4.虚功原理的应用
3
一. 问题的提出
与约束、所受力及运动情况有关
14
4)举例
举例1:单摆
该瞬时摆锤虚位移 r 沿 AA1或AA2方向的任何无限小位移
15
举例2:斜面
dr r
真实位移不仅与约束有关,还与运动、受力有关
16
举例3:汽球 R
在半径为R的球面上质点运动,r-R=0 若取直角坐标系,则写为 x2+ y2 + z2 - R2=0
0,
1,2,..., l
N a
i
(t,
ri
)
ri
0,
1,2,...,s
i1
一种等价定义:虚位移是任何两个可能位移之差。
13
虚位移与实位移区别与联系总结
虚位移
x r
无限小的位移 有多种不同方向 仅与约束有关
实位移
dx dr
无限小或有限位移 有确定的方向