智能小车_黑白线识别_寻光_寻迹_电机驱动原理分析__3路寻迹算法分析_含原理图和程序
- 格式:ppt
- 大小:1.14 MB
- 文档页数:37
多功能电动智能小车学院:电子科学与工程学院一引言1.作品设计的目的:本次设计智能小车的目的是为了实践电路设计的方法和技巧,将书本中的理论知识运用到实践中去,做到活学活用,深入了解电子元器件及其他元器件的基本用途和使用方法,并且能够灵活快速的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验,加强并掌握焊接的能力和技巧,完成预期的要求。
2.作品设计的意义:智能小车实质上是众所周知的简易机器人雏形。
机器人设计是一个极富挑战性的高技术密集型项目,融小车机械、机器人学、机电一体化、单片机、数据融合、精密仪器、实时数字信号处理、图象处理与图象识别、知识工程与专家系统、决策、轨迹规划、自组织与自学习理论、多智能体协调、以及无线通讯等理论和技术于一体,既是典型的智能机器人系统,又为研究发展多智能体系统、多机器人之间的合作与对抗提供了生动的研究模型。
机器人设计通过提供标准任务,使研究人员利用各种技术来获得最佳解决方案。
机器人设计所采用的理论与技术可应用于工业生产、自动化流水线、救援、教育等领域,从而有效推动国家科学技术等其他高、精、尖领域的发展本小组本次研制的多功能智能小车具有寻迹、避障、消防和转向指示功能,可用与探测火源以及到某些人类不便接近的地点执行特殊任务,同时也是在机器人研究领域做一次大胆尝试。
3简易智能小车的原理:以单片机为电路的中央处理器来处理传感器采集到的数据,处理完毕后通过电机驱动电路来驱动电机。
电源部分为整个电路模块提供动力。
整体电路共分为七个部分:MCU控制电路、电机驱动电路、电源供电电路、寻迹检测电路、避障检测电路、LED显示部分,探测火源与灭火部分。
二总体方案设计(1)电动车车体的选择方案一:自制小车。
可在车模店选购配件组装,或者自行加工。
优点:这种方法能够制作出完全符合自身设计意图的车体。
缺点:需要较多时间和高水平的加工工艺。
方案二:配置成品的玩具电动小汽车。
优点:较方便。
缺点:不完全符合使用要求,需要做大量修改。
简易智能小车摘要:本系统基于自动控制原理,以MSP430为控制核心,用红外传感器、光敏三极管、霍尔传感器、接近开关之间相互配合,实现了小车的智能化,小车完成了自动寻迹、避障、寻光入库、计时、铁片检测、行程测量的功能。
本系统采用液晶LCD12864显示数据,良好的人机交流界面,显示小车行程的时间、铁片中心线离起始线的距离和铁片的个数。
整个系统控制灵活,反应灵敏。
关键词:MSP430 传感器 LCD12864目录一、方案论证与比较 (3)1、题目任务要求及相关指标的分析 (3)2、方案的比较与选择 (3)(1)控制单元的选择 (3)(2)直流电机驱动电路的选择 (3)(3)轨迹探测模块选择 (3)(4)金属片的探测 (3)(5)路程测量方案的选择 (4)(6)避障方案的选择 (4)(7)小车寻光方案的选择 (4)(8)电源的选择 (4)(9)刹车机构功能方案比较 (5)二、系统总体设计方案及实现方框图 (5)1、系统总体设计方案 (5)2、系统实现框图 (5)三、理论分析与计算 (5)1、铁片中心线距离的测量 (5)2、小车行程时间的测量 (5)四、主要功能电路设计 (6)1、小车循迹模块 (6)2、小车检测铁片模块 (6)3、小车测距模块 (6)4、小车避障模块 (6)5、小车寻光模块 (6)6、直流电机驱动模块 (7)五、系统软件的设计 (8)六、测试量数据与分析 (8)1、测量数据 (8)2、数据分析 (8)参考文献 (8)一、方案论证与比较1.题目任务要求及相关指标的分析题目要求小车按照规定的跑道行驶,同时检测在跑道下的铁片,在检测到最后一块铁片时小车会有连续的声光显示;后又可以准确的避开障碍,而且不与障碍物接触;最后,在光源的引导下,进入车库。
智能小车有显示功能,可以显示检测到铁片的数量,金属片距起点的距离,行驶的总时间。
整个行驶过程中的总时间不大于90秒,小车在行驶90秒后会自动停车。
2. 方案的比较与选择(1)控制单元的选择方案一:利用单片机与FPGA配合使用。
智能小车其实是一种小型化机器人,它通过执行特定的程序来完成不同的功能。
由于靠程序来运行,智能小车的智能化程度非常高,可以在无人管理的情况下连续完成一系列复杂的任务,而且智能小车功能多样,只需要下载不同的程序就可以完成特定任务,调试简单,这使得智能小车在诸如科学研究、地质勘探、危险搜索、智能救援、汽车避障、货物运输等许多领域中应用广泛。
本设计中,采用51单片机作为小车控制的核心,实现小车的循迹、避障、寻光、加减速和语音控制等功能。
小车系统主要由避障模块、循迹模块、测速模块、显示模块、寻光模块、电机驱动模块、语音模块和电源模块组成。
小车采用模式切换的方式来执行不同的功能;采用四组红外发射对管和电压比较器实现循迹功能;采用超声波和舵机模块实现避障功能;采用四组光敏二极管实现寻光功能;采用PWM调速原理实现小车加减速功能;采用四组数码管来显示小车的速度或距离。
语音控制是本设计的亮点之一,此功能的实现要基于带有语音播报和控制功能的SPCE061A 单片机,通过初始化、训练、识别几个步骤后,就能实现小车前进、倒退、左拐、右拐和停车五个语音功能。
本次设计出的智能小车集各种常见功能于一身,是一个功能齐全,性能先进的多功能语音智能车。
关键词:智能小车,SPCE061A,单片机,循迹,避障,寻光,语音控制Smart car is actually a kind of miniature robot, which can complete different functions by performing a particular program .Because it’running is based on program , the intell igent degree of intelligent cars is very high,series of complex task can be done continuously in the case of unattended , and smart car has low production cost, simple circuit structure, convenient debugging。

循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
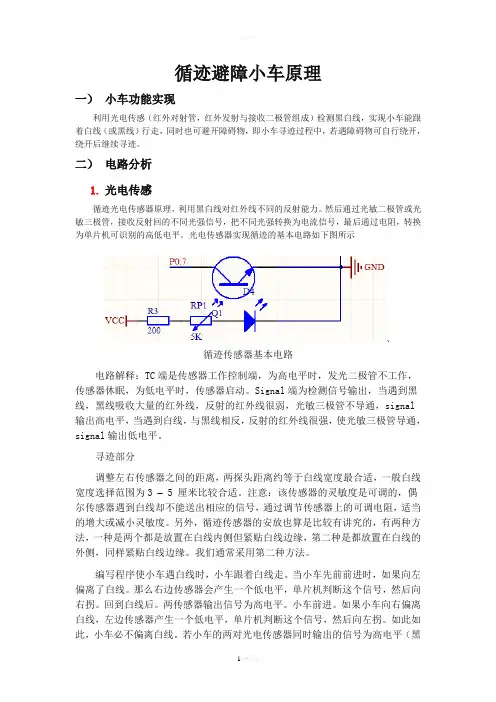
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。

2009广东工业大学第二届电子设计大赛设计报告注:转载本文内容需注明出处!否则后果自负!如有电子方面的问题可以加入我们的QQ群(84998716)进行交流竞赛题目:智能搬运小车参赛编号:X1-003学生姓名:学院班级:智能搬运小车一.前言随着生产自动化的发展,智能小车已经越来越广泛地应用到生产自动化上,随着科学技术的发展,传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。
视觉传感器的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。
视觉传感器的核心器件是摄像管或CCD,但其价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近传感器是一种实用有效的方法。
智能搬运小车要实现自动寻迹功能、趋光行驶功能和金属探测功能就必须要检测黑带、感知光源和识别金属物,传感器相当给机器人一个视觉功能。
故对机器人的研究已成为必要。
智能循迹是基于红外传感器实现小车寻找黑线,利用光敏电阻在不同强度光照下电阻分压的不同实现趋光行驶,利用接近开关探测金属物并用电磁铁将金属捡起,并可实现声光提示。
注:转载本文内容需注明出处!否则后果自负!本文内容来自二.硬件设计1.小车控制单元的选择方案一:采用各类数字电路来组成小车的控制系统,对光源检测信号,黑带检测信号,铁片检测信号。
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,对各路信号处理比较困难。
方案二:采用STC89C52单片机来作为整机的控制单元。
铁片检测采用电感式接近开关LJ18A3-4-Z/BX检测,黑带检测采用红外发射二极管和红外接收管对光源信号进行采集,光源检测利用光敏电阻的感光特性对光源信号检测,信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
基于单片机的智能循迹小车循迹小车学生姓名:常德兴龙俊锦杨勇院(系):物电学院专业:电子科学与技术2011 年 11 月 25 日第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
移动机器人是机器人学中的一个重要分支,出现于20世纪06年代。
当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。
智能小车,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航及白动控制等技术,是典型的高新技术综合体。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:(1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作;(2)摄像机,用来获得道路图像信息;(3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆技术按功能可分为三层,即智能感知/预警系统、车辆驾驶系统和全自动操作系统团。
上一层技术是下一层技术的基础。
三个层次具体如下:(1)智能感知系统,利用各种传感器来获得车辆自身、车辆行驶的周围环境及驾驶员本身的状态信息,必要时发出预警信息。

智能循迹小车报告记录————————————————————————————————作者:————————————————————————————————日期:电子信息专业实验报告课程电子信息系统综合设计实验MCU部分实验题目智能机器小车设计实验总分学生姓名学号学生姓名学号学生姓名学号实验时间地点分组电子信息学院专业实验中心目录一、摘要二、题目要求三、软硬件设计方案四、各部分电路的作用及电路工作原理分析五、系统调试与实验结果六、实验结果七、拓展功能八、参考资料九、附录一、摘要摘要:智能循迹小车主要由单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计我们采用STC89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够识别黑白两色路面,电机模块由L293D芯片和两个减速直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车STC89C52单片机L293D芯片红外光对管二、题目要求“智能寻迹机器小车设计”,要求采用MCS-51单片机为控制芯片,设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。
三、软硬件设计方案1、硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
1.1、单片机模块单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
本次小车的设计我们小组采用的是ATMEL公司的STC89C52RC单片机。
STC89C52RC是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
STC89C52RC单片机介绍:上图为STC89C52RC引脚图。
STC89C52RC引脚功能说明:VCC(40引脚):电源电压VSS(20引脚):接地P0端口(P0.0~P0.7,39~32引脚):P0口是一个漏极开路的8位双向I/O口。
简单电子系统设计报告---------智能循迹小车学号201009130102年级10学院理学院专业电子信息科学与技术姓名马洪岳指导教师刘怀强摘要本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位。
本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。
自动寻迹的功能采用红外传感器,通过检测高低电平将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。
关键词:STC89C51单片机;L298N;红外传感器;寻迹一、设计目的通过设计进一步掌握51单片机的应用,特别是在控制系统中的应用。
进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。
二、设计要求该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车姿态的控制,绕跑到行驶一周。
三、软硬件设计硬件电路的设计1、最小系统:小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。
主要包括:时钟电路、电源电路、复位电路。
其中各个部分的功能如下:(1)、电源电路:给单片机提供5V电源。
(2)、复位电路:在电压达到正常值时给单片机一个复位信号。
图1 单片机最小系统原理图2、电源电路设计:模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。
在本设计中,51单片机使用5V电源,电机及舵机使用5V电源。
考虑到电源为电池组,额定电压为4.5V,实际充满电后电压则为4-4.5V,所以单片机及传感器模块采用最小系统模块稳压后的5V电源供电,舵机及电机直接由电池供电。
智能小车循迹原理智能小车是一种能够自主行驶的智能机器人,它可以根据预设的路径或者环境中的标志物进行循迹行驶。
智能小车的循迹原理是通过感知环境、判断路径、控制方向和速度等步骤,实现对道路的自主识别和行驶。
下面将详细介绍智能小车的循迹原理。
首先,智能小车需要通过传感器对环境进行感知。
常用的传感器有红外线传感器、摄像头、激光雷达等。
这些传感器可以获取周围环境的信息,比如道路的颜色、形状、障碍物的位置等。
通过这些信息,智能小车可以判断自己所处的位置和前方的道路情况。
其次,智能小车需要对获取的信息进行处理和分析,以便判断最优的行驶路径。
在这一步骤中,智能小车会使用计算机视觉、图像处理、机器学习等技术,对传感器获取的数据进行处理,提取有用的特征信息,比如道路的边界、标志物的位置等。
然后,智能小车会根据这些信息判断最优的行驶路径,以及避开障碍物的策略。
接着,智能小车会根据判断出的最优路径和避障策略,通过控制系统来实现对方向和速度的控制。
这一步骤需要智能小车具备良好的控制算法和执行机构,比如电机、舵机等。
智能小车会根据判断出的行驶路径和环境信息,调整自己的行驶方向和速度,以实现对道路的自主识别和行驶。
最后,智能小车会不断地重复以上步骤,实现对道路的持续循迹行驶。
通过不断地感知环境、判断路径、控制方向和速度,智能小车可以实现对复杂环境的自主行驶,比如在有交通标志、车辆和行人的道路上行驶。
总的来说,智能小车的循迹原理是通过感知环境、判断路径、控制方向和速度等步骤,实现对道路的自主识别和行驶。
这一原理是基于传感器、计算机视觉、控制系统等技术的集成应用,能够实现对复杂环境的自主行驶,具有很高的应用价值和发展前景。
电动小车的循迹2007年05月20日星期日 14:15在2001、2003年连续两届全国大学生电子设计竞赛中,均出现了简易智能小车这种集光、机、电于一体的题目。
本文具体介绍一下小车如何正确地进行循迹并给出必要的源代码。
1.小车控制及驱动单元的选择此部分是整个小车的大脑,是整个小车运行的核心部件,起着控制小车所有运行状态的作用。
通常选用单片机作为小车的核心控制单元,本文以台湾凌阳公司的SPCE061A单片机为例予以介绍。
SPCE061是一款拥有2K RAM、32KFlash、32 个I/O 口,并集成了AD/DA功能强大的16位微处理器,它还拥有丰富的语音处理功能,为小车的功能扩展提供了相当大的空间。
只要按照该单片机的要求对其编制程序就可以实现很多不同的功能。
小车驱动电机一般利用现成的玩具小车上的配套直流电机。
考虑到小车必须能够前进、倒退、停止,并能灵活转向,在左右两轮各装一个电机分别进行驱动。
当左轮电机转速高于右轮电机转速时小车向右转,反之则向左转。
为了能控制车轮的转速,可以采取PWM调速法,即由单片机的IOB8、IOB9输出一系列频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。
左右轮两个电机转速的配合就可以实现小车的前进、倒退、转弯等功能。
2.小车循迹的原理这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
红外探测器探测距离有限,一般最大不应超过15cm。
对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。
寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
摘要:本智能识别小车以STC89C52单片机为控制芯片,以直流电机,光电传感器,超声波传感器,电源电路以及其他电路构成。
系统由STC89C52通过IO口,通过红外传感器检测黑线,利用单片机输出PWM脉冲控制直流电机的转速和转向,循迹由TCRT5000型光电对管完成。
一、系统设计1、小车循迹,避障原理这里的循进是指小车在白色地板上寻黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外a在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地板时,发生漫反射反射光被装在小车上的按收管按收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光,单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
红外探测器探测距离有限一殷最大不应超过3cm。
而避障则是通过超声波模块不断向前方发射超声波信号,通过接收反射回来的超声波信号,从而实现的避障。
当前方有障碍物时,超声波会向单片机串口发送一串数字,这些数字就是当前小车距离障碍物得距离。
当串口接收到信号时,会引发串口中断,单片机通过读取距离值,并且对此数值进行分析是不是距离小车很近,是的话就进行转向;否则继续循迹。
当小车遇到第一个障碍后,就计数一次,这样当遇到第二个障碍物时,小车就可以以不同的形式躲避障碍物了。
2、选用方案(1):采用成品的小车地盘,通过改装来完成任务;(2):采用STC89C52单片机作为主控制器;(3):采用7V电源经7805稳压芯片降压后为其他芯片及器件供电。
(4):采用TCRT5000型红外传感器进行循迹;(5):L298N作为直流电机的驱动芯片;(6):通过对L298N使能端输入PWM来控制电机转速和转向;3、系统机构框图如下所示:超声波模块主控制芯片STC89C52红外传感器直流电机L298N稳压电源模块电压比较器二、硬件实现及单元电路设计与分析1、微控制模块设计与分析微控制器模块我们采用STC89C52。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。