理论力学大作业
- 格式:doc
- 大小:30.50 KB
- 文档页数:1
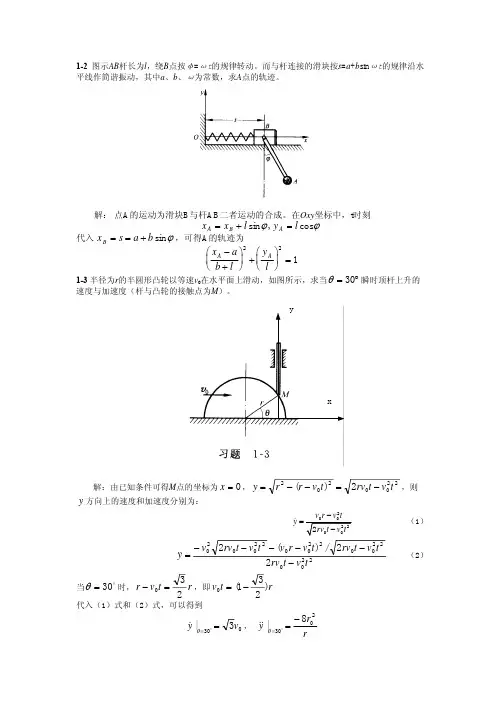
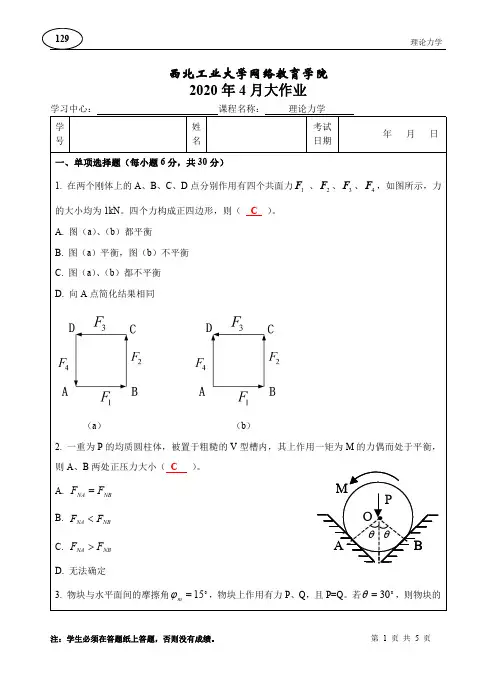
西北工业大学网络教育学院2020年4月大作业(a )(b )2.一重为P 的均质圆柱体,被置于粗糙的V 型槽内,其上作用一矩为则A 、B 两处正压力大小()。
A.NB NA F F =B.NB NA F F <C.NB NA F F >D.无法确定3.物块与水平面间的摩擦角15=,物块上作用有力状态为(A A.临界平衡状态B.静止(非临界平衡状态)C.滑动状态D.无法确定,它们的方向是(C C 121mL =3mL =48mL =4mL =解:该物体系为平行力系若取整体为研究对象,有三个未知量,不能解出,先取CD 为研究对象。
=∑cm 0412=⋅-+⨯D F M q ()kN M q F D 15241=+==∑yF02=+-D c F q F kNF q F D c 52=-=取AC 为研究对象=∑Bm02122=⋅-⨯-⋅-c A F q F ()kNF q F c A 15-=+-=0=∑yF02='--+c B A F q F F kNF B 40=综上,kN F A 15-=,kN F B 40=,kN F C 5=;kNF D 15=2.直径为cm d 8=的滚子在水平面上只滚动不滑动。
杆BC 一端与滚子铰接,另一端与滑块C 铰接,已知图示位置(杆BC 水平)滚子的角速度为s rad /10=ω,30=α,60=β,cm BC 30=,求BC 杆的角速度和滑块C 的速度。
(23分)∙AO αCBβω。
第一章 静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
( )2.在理论力学中只研究力的外效应。
( )3.两端用光滑铰链连接的构件是二力构件。
( )4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
( )5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
( )6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
( )7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
( )8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
( )二、选择题1.若作用在A 点的两个大小不等的力1和2,沿同一直线但方向相反。
则其合力可以表示为 。
① 1-2;② 2-1;③ 1+2;2.作用在一个刚体上的两个力A 、B ,满足A =-B 的条件,则该二力可能是 。
① 作用力和反作用力或一对平衡的力; ② 一对平衡的力或一个力偶。
③ 一对平衡的力或一个力和一个力偶; ④ 作用力和反作用力或一个力偶。
3.三力平衡定理是 。
① 共面不平行的三个力互相平衡必汇交于一点;② 共面三力若平衡,必汇交于一点;③ 三力汇交于一点,则这三个力必互相平衡。
4.已知1、2、3、4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此 。
① 力系可合成为一个力偶;② 力系可合成为一个力;③ 力系简化为一个力和一个力偶;④ 力系的合力为零,力系平衡。
F F F F5.在下述原理、法则、定理中,只适用于刚体的有 。
① 二力平衡原理; ② 力的平行四边形法则;③ 加减平衡力系原理; ④ 力的可传性原理;⑤ 作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是 。
2.已知力沿直线AB作用,其中一个分力的作用与AB 成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为 度。
第1章测试题一.填空题1:作用在刚体上的力可沿其作用线任意移动,而不改变力对刚体的作用效果,所以,在静力学中,力是_______矢量。
答案滑动2:力对物体的作用效应一般分为_______效应和_______效应。
答案内(变形)。
外(运动)3:对非自由体的运动所预加的限制条件称为_______;约束反力的方向总是与约束所能阻止的物体的运动趋势的方向_______;约束反力由_______引起,且随_______改变而改变。
答案约束。
相反。
主动力。
主动力二.单选题1:力沿其作用线由D点滑移到E点(见图1.1),则A,B,C三铰处的约束反力_______。
(A)都不变(B)都改变(C)只有C铰反力不变(D)只有C铰反力改变答案B2:如图1.2所示各力三角形中,表示力F1是和F2两个力的合力的正确图形应是_______。
(A)图(a)(B)图(b)(C)图(c)(D)图(d)答案C3:在如图1.3所示结构中,各构件重量不计,杆AB上作用有力F,则_______。
(A)AB杆为二力杆(B)BC构件为二力构件(C)没有二力构件(D)系统不可能平衡答案B三.简答题1:假设所有接触均为光滑,图中未标出重量的物体自重均不考虑。
可以应用二力平衡及三力汇交确定力线的,按确定力线画出受力图。
如图1.4所示,把各球的受力图画于对应的图1.5中。
答案略2:如图1.6所示,把各杆的受力图画于对应的图1.7中。
答案略3:如图1.8所示,把各梁AB的受力图画于对应的图1.9中。
答案略4:如图1.10所示,把各构件中杆件4B,BC(或CD)的受力图画于对应的图1.11中(图(a)中假定P力作用在销钉B上;图(c)中杆和CD杆在B处铰接)。
答案略5:如图1.12所示,把各组合梁中AB,BC(或jBC)梁的受力图画于对应的图1.13中(图(b)中AB杆和CD杆在D处铰接,CD杆杆端C靠在光滑墙壁上)。
答案略6:如图1.14所示,把刚架ABCD的受力图画于对应的图1.15中。
均布载荷下悬索桥几何形状的研究摘要本文分别以两种模式下的均布载荷情形为出发点,研究了悬索桥的主缆几何形状。
针对沿索长均匀分布的载荷,此时可将悬索桥简化为悬挂于重力场下的一条柔索。
取柔索最低点(设为C )为坐标原点,建立平面直角坐标系,在索上任取一点(不包括最低点),设该点为(,)D x y ,以这一点到柔索最低点的一小段为隔离体进行受力分析,由力的平衡方程求解积分可得x 与s ((,)D x y 到C 之间的索长)之间的关系,再将所得关系式回代到之前建立的常微分方程中,则可求得y 与x 之间的关系,满足悬链线方程。
关系式中的未知参数有载荷集度w 和最低点水平拉力0T ,考虑到0T 在工程实际中不易测量,我们建立了超越方程,并代入生活中的实际参数使用Matlab 用试算法计算0T ,最后绘出悬索桥的形状。
针对沿水平方向均匀分布的载荷,即考虑悬索桥的负载情况时,同样建立平面直角坐标系选取研究对象进行受力分析,通过类似的过程我们最后得出在此情况下悬索桥呈抛物线形状。
关键词:悬链线方程,载荷集度,试算法一、背景介绍:悬索桥,又名吊桥,指的是以通过索塔悬挂并锚固于两岸(或桥两端)的缆索(或钢链)作为上部结构主要承重构件的桥梁。
悬索桥是以承受拉力的缆索或链索作为主要承重构件的桥梁,由悬索、索塔、锚碇、吊杆、桥面系等部分组成。
悬索桥的主要承重构件是悬索,它主要承受拉力,一般用抗拉强度高的钢丝、钢缆等制作。
其缆索几何形状由力的平衡条件决定,一般接近抛物线。
悬索桥中最大的力是悬索中的张力和塔架中的压力。
假如在计算时忽视悬索的重量的话,那么悬索形成一个双曲线。
这样计算悬索桥的过程就变得非常简单了。
二、模型建立及求解:2.1 模型的假设本文中,我们设定悬索为理想的柔索,因此,柔索仅承受轴向拉力。
悬索悬挂于重力场,单位长度承载铅垂方向的力为w ,即此时悬索桥不加任何负载,仅有自身重力导致其下垂。
若要考虑悬索桥的桥面的负载,悬索的重量远小于桥面道路重量,可忽略不计,这时悬索受到沿水平方向均匀分布的载荷。
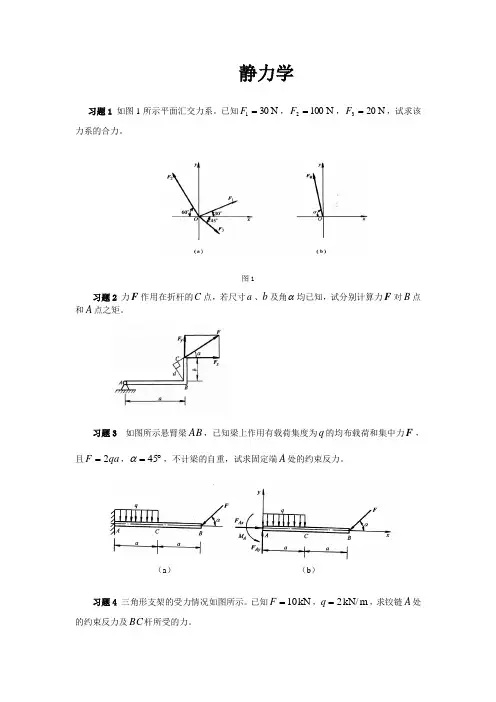
静力学习题1 如图1所示平面汇交力系。
已知N 301=F ,N 1002=F ,N 203=F ,试求该力系的合力。
图1习题2 力F 作用在折杆的C 点,若尺寸a 、b 及角α均已知,试分别计算力F 对B 点和A 点之矩。
习题3 如图所示悬臂梁AB ,已知梁上作用有载荷集度为q 的均布载荷和集中力F ,且qa F 2=,︒=45α,不计梁的自重,试求固定端A 处的约束反力。
(a ) (b )习题4 三角形支架的受力情况如图所示。
已知kN 10=F ,m kN/2=q ,求铰链A 处的约束反力及BC 杆所受的力。
习题5轨的最远距离为l习题 6 等边三角支架由杆AB 与杆BC 铰接而成,如图所示。
在支架上搁置一圆筒重 G 2kN ,不计杆重。
求铰链A ,B ,C 处的约束反力。
习题7 如图所示,物块重G ,放在倾角为α的斜面上,物块与斜面间的静摩擦系数为s f 。
求物块在斜面上静止时水平推力1F 的大小。
习题8 如图所示攀登电线杆用的脚套钩。
已知电线杆直径为d ,AB 间的垂直距离为b ,套钩与电线杆间的静摩擦系数为s f 。
求脚踏力F 到电线杆间的距离L 为多少才能保证工人安全操作。
(a ) (b ) (c )习题9 半径为r 的斜齿轮,其上作用有力F ,如图a 所示。
求力F 在坐标轴上的投影及力F 对y 轴之矩。
习题10 一曲柄传动轴上安装着皮带轮,如图a 所示。
皮带的拉力122F F =,曲柄上作用有铅垂力N 2000=F 。
已知皮带轮的直径mm 400=D ,曲柄长mm 300=R ,皮带1和皮带2与铅垂直线间夹角分别为α和β,︒=30α,︒=60β。
其它尺寸如图。
求皮带拉力和轴承A 、B 处的约束反力。
习题11 如图a 所示转轴AB ,已知胶带张力N 5361=F ,N 642=F ,圆柱齿轮节圆直径mm 5.94=D ,压力角︒=20α。
求(1)齿轮作用力F 的大小及轴承A 、B 处的约束反力。
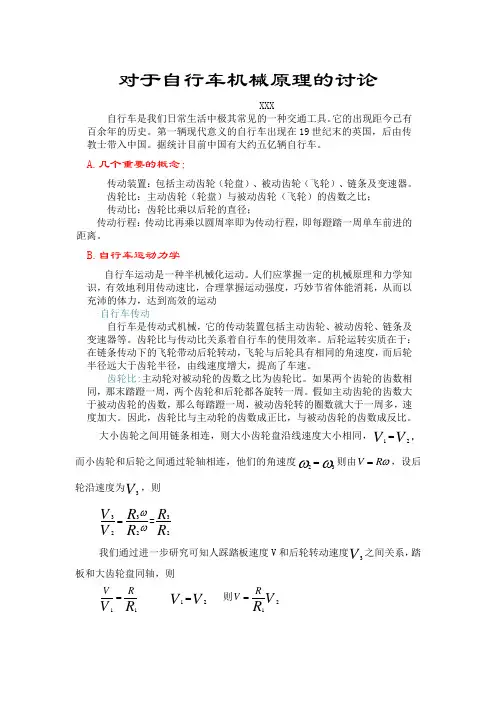
对于自行车机械原理的讨论 XXX 自行车是我们日常生活中极其常见的一种交通工具。
它的出现距今已有百余年的历史。
第一辆现代意义的自行车出现在19世纪末的英国,后由传教士带入中国。
据统计目前中国有大约五亿辆自行车。
A.几个重要的概念:传动装置:包括主动齿轮(轮盘)、被动齿轮(飞轮)、链条及变速器。
齿轮比:主动齿轮(轮盘)与被动齿轮(飞轮)的齿数之比; 传动比:齿轮比乘以后轮的直径;传动行程:传动比再乘以圆周率即为传动行程,即每蹬踏一周单车前进的距离。
B.自行车运动力学自行车运动是一种半机械化运动。
人们应掌握一定的机械原理和力学知识,有效地利用传动速比,合理掌握运动强度,巧妙节省体能消耗,从而以充沛的体力,达到高效的运动·自行车传动自行车是传动式机械,它的传动装置包括主动齿轮、被动齿轮、链条及变速器等。
齿轮比与传动比关系着自行车的使用效率。
后轮运转实质在于:在链条传动下的飞轮带动后轮转动,飞轮与后轮具有相同的角速度,而后轮半径远大于齿轮半径,由线速度增大,提高了车速。
齿轮比:主动轮对被动轮的齿数之比为齿轮比。
如果两个齿轮的齿数相同,那末踏蹬一周,两个齿轮和后轮都各旋转一周。
假如主动齿轮的齿数大于被动齿轮的齿数,那么每踏蹬一周,被动齿轮转的圈数就大于一周多,速度加大。
因此,齿轮比与主动轮的齿数成正比,与被动齿轮的齿数成反比。
大小齿轮之间用链条相连,则大小齿轮盘沿线速度大小相同,V V 21=,而小齿轮和后轮之间通过轮轴相连,他们的角速度ωω32=则由ωR V =,设后轮沿速度为V 3,则 ωωR R V V 2323==R R 23我们通过进一步研究可知人踩踏板速度V 和后轮转动速度V 3之间关系,踏板和大齿轮盘同轴,则R V R V 11=V V 21= 则V R RV 21=由R R V V 2323= 故R R R V R V 3123=传动比(传动系数):齿轮比乘以后圈直径即为传动比。
理论力学作业参考答案平面任意力系(一)一、填空题1、平面任意力系的主矢RF '与简化中心的位置无关,主矩o M 一般与简化中心的位置有关,而在__主矢为零___的特殊情况下,主矩与简化中心的位置无 __ 关.2、当平面力系的主矢等于零,主矩不等于零时,此力系合成为_一个合力偶.3、如右图所示平面任意力系中,F F F F 1234===,此力系向A 点简化的结果是0R F '≠,0A M ≠ ,此力系向B 点简化的结果是0RF '≠,0A M = . 4、如图所示x 轴与y 轴夹角为α,设一力系在oxy 平面内对y 轴和x轴上的A ,B 点有∑A m 0)(=F ,∑B m 0)(=F ,且∑=0y F ,但∑≠0x F ,l OA =,则B 点在x 轴上的位置OB =___/cos l θ ____.(题4图)(题5图)5、折杆ABC 与CD 直杆在C 处铰接,CD 杆上受一力偶m N 2?=M 作用,m 1=l ,不计各杆自重,则A 处的约束反力为___2N___. 二、判断题(√ ) 1.若一平面力系对某点之主矩为零,且主矢亦为零,则该力系为一平衡力系.(√ ) 2.在平面力系中,合力一定等于主矢.(× ) 3.在平面力系中,只要主矩不为零,力系一定能够进一步简化.1F 2F 3F 4F AB(√ ) 4.当平面任意力系向某点简化结果为力偶时,如果再向另一点简化,则其结果是一样的.(×) 5.平面任意力系的平衡方程形式,除一矩式,二矩式,三矩式外,还可用三个投影式表示.(× ) 6.平面任意力系平衡的充要条件为力系的合力等于零.(× ) 7.设一平面任意力系向某一点简化得一合力,如另选适当的点为简化中心,则力系可简化为一力偶.(√ ) 8.作用于刚体的平面任意力系主矢是个自由矢量,而该力系的合力(若有合力)是滑动矢量,但这两个矢量等值,同向.( × ) 9.图示二结构受力等效.三、选择题1、关于平面力系与其平衡方程式,下列的表述正确的是_____D_ ___A.任何平面任意力系都具有三个独立的平衡方程。
理论力学大作业习题大作业习题第一组一、一组合梁ABC的支承及载荷如图示。
已知F=1KN,M=0.5KNm,求固定端A的约束反力。
二、图示平面机构中,曲柄OA长l,以匀角速度ω0转动,同时杆EC以匀速vO向左滑动,带动杆DF在铅直滑槽内运动。
在图示瞬时,AD=DC=l,试求此时杆DF滑动的速度。
第二组一、用四根等长l,同重G的直杆铰接成正方形ABCD,并在AB、BC的中点用软绳EF相连。
今将AD杆固定在铅垂位置,求此时软绳中的拉力。
二、一半径为r的半圆形凸轮,与长均为r的曲柄O1A、O2B相连,又与长为r的杆OC光滑接触。
曲柄O1A、O2B以相同的角速度分别绕其支座在图示平面内转动,并始终保持平行。
图示瞬时,OC杆与凸轮最高点接触,试求:(1)OC杆的角速度;(2)OC杆的角加速度。
第三组一、平面构架如图所示。
已知物块重W,DC=CE=AC=CB=2l ,R=2r=l 。
试求支座A、E处的约束力及BD杆所受的力。
二、平面机构如图所示。
套筒B与CB杆相互垂直并且刚连,CB杆与滚子中心C点铰接,滚子在车上作纯滚动,小车在水平面上平动。
已知:半径r=h=10cm,CB=4r。
在图示位置时,?=60°,OA杆的角速度?=2rad/s,小车的速度u=10m/s。
试求该瞬时滚子的角速度。
第四组一、图示平面机构,各构件自重均不计。
已知:OA=20cm,O1D=15cm,q=30°,弹簧常数k=100N/cm。
若机构平衡于图示位置时,弹簧拉伸变形d=2cm,M1=200N・m,试求使系统维持平衡的M2。
二、机构如图,已知:OA=2b;在图示瞬时,OB=BA,f=60°,q=30°,∠A=90°,OA的角速度为?。
试求此瞬时套筒D相对BC的速度。
第五组一、图示来而结构由杆AB及弯杆DB组成,P=10N,M=20N・m,L=r=1m,各杆及轮自重不计,求固定支座A及滚动支座D的约束反力及杆BD的B端所受的力。
Maple大作业(理论力学)班级:力学132班姓名:党宏宇学号:1304511。
图1(a )所示摇杆滑道机构中的滑块M 同时在固定的圆弧槽BC 和摇杆OA 的滑道中滑动。
如弧BC 的半径为R ,摇杆OA 的轴O 在弧BC 的圆周上。
摇杆绕O 轴以等角速度ω转动,当运动开始时,摇杆在水平位置。
试分别用直角坐标法和自然法给出点M 的运动方程,并求其速度和加速度.解:●建模:①坐标法:建立如图1(b )所示坐标系1xO y ,由于AOx=t ω∠,则1MO x=2t ω∠。
②自然法:当t=0时,M 点在0M 点处,以0M 为弧坐标0M M 的原点,如图1(a)所示。
010M M=s=R MO M =2R t ω∠。
●Maple 程序: ⑴坐标法: >#清零。
〉 #点M 横坐标。
> #点M 纵坐标.>#消去时间t 得到轨迹方程〉 #点M 速度在x 轴上的投影。
〉#点M 速度在y 轴上的投影。
图1(a)图1(b)〉#点M速度的大小。
〉#化简根号.>#合并。
>#点M速度与x轴夹角。
〉#点M速度与y轴夹角.〉#点M加速度在x轴投影。
>#点M加速度在y轴投影. >#点M加速度的大小.>#化简根号。
〉#合并.>#点M加速度与x轴夹角.>#点M加速度与y轴夹角。
⑵自然法:〉#清零。
>#点M的运动方程。
〉#点M的速度。
〉 #点M 的切向加速度。
>#点M 的径向加速度。
〉#点M 加速度的大小。
>#化简根号。
>#合并.答:坐标法得到的运动方程为x=Rcos2t y=Rsin2t ωω,.速度为M =2R νω.加速度为24M a R ω=。
自然法得到的运动方程为2s R t ω=.速度为2v R ω=。
加速度为24a R ω=。
2。
如图2(a )所示,点M 在平面Ox ’ y ’中运动,运动方程为:x ’= 40(1−cos t ),y '= 40sin t式中t 以s 计,x '和y '以mm 计。
理论力学习题及答案理论力学习题及答案理论力学是物理学的基础学科之一,它研究物体运动的规律以及力的作用原理。
在学习理论力学的过程中,掌握一定的习题是非常重要的。
本文将提供一些理论力学的学习题及其答案,希望能够帮助读者更好地理解和掌握这门学科。
1. 一个质点在水平方向上受到一个恒力F的作用,已知质点的质量为m,求质点在水平方向上的加速度。
解答:根据牛顿第二定律,力等于质量乘以加速度,即F = ma。
所以质点在水平方向上的加速度为a = F / m。
2. 一个质点在竖直方向上受到一个重力作用,已知质点的质量为m,求质点在竖直方向上的加速度。
解答:根据牛顿第二定律,力等于质量乘以加速度,即mg = ma。
所以质点在竖直方向上的加速度为a = g,其中g为重力加速度。
3. 一个质点在竖直方向上受到一个重力作用和一个向上的恒力F的作用,已知质点的质量为m,求质点在竖直方向上的加速度。
解答:根据牛顿第二定律,力等于质量乘以加速度,即mg - F = ma。
所以质点在竖直方向上的加速度为a = (mg - F) / m。
4. 一个质点在斜面上受到一个斜面法向力N和一个斜面平行力F的作用,已知斜面的倾角为θ,求质点在斜面上的加速度。
解答:将斜面的坐标系选择为斜面的法线方向和水平方向,根据牛顿第二定律在斜面的法线方向和水平方向分别列出方程。
在斜面的法线方向上,N -mgcosθ = ma_n,其中a_n为质点在斜面法线方向上的加速度;在斜面的水平方向上,F - mgsinθ = ma_t,其中a_t为质点在斜面平行方向上的加速度。
通过这两个方程可以解得质点在斜面上的加速度。
5. 一个质点在圆周运动中,已知质点的质量为m,圆周的半径为r,求质点的向心加速度。
解答:向心加速度是质点在圆周运动中指向圆心的加速度。
根据牛顿第二定律,向心力等于质量乘以向心加速度,即F = ma_c。
而向心力可以表示为F =mω^2r,其中ω是质点的角速度。
理论力学作业题解析解 (1)节点D,坐标及受力如閤2・£b,由平衡理论得=0. F DS -抵 co" = 0三巧=0. sill -F = 0解得F DB =F cot e讨论:也可以向垂克于尸庞方向投影,有接得FD3 二 Fcote(2)节点B,坐标及受力如图2・8c 所示。
由半衡埋论得三巧=0,心 sin 0 - F D3. = 0三巧=0. F CB sin 0 - F A3 - 0解得F OQA N =F DS coW = Fcot 26 = — == 80 kN02 0.122-16在2-16a 9T 示结构中,备构件的口車略去不计,在构件匕作用1力偶矩为M 的力偉各尺寸如图。
求支座X 的约束力。
解(1)研究对象受力如阳2・16b 所示■为构成约束力偶,右F 厂尸。
(2)研究刈埶ADC,受力如图2-16C 所示工耳=0, -F C ^F A COS 45° = 0F A = ^2F C =:址(方向如图)LAf =0 • 一竹・/十A/ =0\f_V<a)(b) (c)图2・1634 图 3-la+,已知斤=150N, K =200N,巧二 300N, F 二 F=200N. 求力系向点O 简化的结果;并求力系合力的大小及其与原点Q 的距离九图3・1解(1)求合力F R 的人小1 12£片=_百 x-=-X -=-F 3 X- V2 ' V10 21 1 1=-150Nx-^-200Nx-^-300Nx-=^ =-437.62 N 、2 V1O 岳巧"恥才脅r 盼斗= -150Nx —-200Nx-^- +300Nx — =-161.62 N y/2 <10 V5F R = {(叭+(诃=@437.62)2 + 主矩 叫二饕ui + Ex 燈m-FxO.08111 ° r ro 10 (P0= 150Nx —m+300Nx —m-200Nx0.08m = 21.44 N m (逆 V2V5合力尸卩在原点0的左側上方,如图3・lb 所示,且F R 二斤二466.5N(2)求距离d如4466.5 N主矢 I 44N-H1 — = 0.0459m = 4.59cm (图3・lb ) 466.5 N200三巧二 0, 比+丄<7 * 4 m- Fcos45° - 0 ,= 02三 A/詁二 0.3/^ - g x 4 m x m - Al -F sin 45° x 3 m + F cos45° x 4 m = 0M* =12 kN m (逆)3-13 ill VC 和CD 构戎的纟H 合梁通过饺琏C 连按。
专业 学号 姓名 日期 成绩模块1 静力学公理和物体的受力分析一、补充题1.1 按照规范的方法(指数或字母前缀)表达下列数据 3784590008N 应为: 或0.0000003563m350708kN=( )N86Mg=( )kg2017.3=28=1.2 如果已知矢量 A=8i +2j – 4k,和B =1.5i -2j +0.4k 求: 1、A +B2、A -B3. A,B 的模及单位矢量4. A ∙B5. A ⨯B专业 学号 姓名 日期 成绩二、受力图1-1 画出各物体的受力图。
下列各图中所有接触均处于光滑面,各物体的自重除图中已标出的外,其余均略去不计。
1-2 画出下列各物体系中各指定研究对象的受力图。
接触面为光滑,各物自重除图中已画出的外均不计。
qABBCA(c)P 2(a)CDABCFAD(b)(销钉)B CABBC专业 学号 姓名 日期 成绩模块2 平面汇交力系与平面力偶系专业学号姓名日期成绩2-1铆接薄板在孔心A、B和C处受三力作用,如图所示。
F1=100N,沿铅直方向;F2=50N,沿水平方向,并通过点A;F3=50N,力的作用线也通过点A,尺寸如图。
求此力系的合力。
2-2图示结构中各杆的重量不计,AB和CD两杆铅垂,力F1和F2的作用线水平。
已知F1=2kN,F2=l kN,CE杆与水平线的夹角为300,求体系平衡时杆件CE所受的力。
专业学号姓名日期成绩2-3在水平梁上作用着两个力偶,其中一个力偶矩M1=60kN.m,另一个力偶矩M2=40kN.m,已知AB=3.5m,求A、B两支座处的约束反力。
2-4压榨机构如图所示,杆AB、BC的自重不计,A、B、C处均为铰链连接。
油泵压力F=3kN,方向水平,h=20mm,l=150mm,试求滑块C施于工件的压力。
模块3 平面任意力系与摩擦专业 学号 姓名 日期 成绩3-1 露天厂房立柱的底部是杯形基础,立柱底部用混凝土砂浆与杯形基础固连在一起,已知吊车梁传来的铅直载荷F =60kN ,风荷q =2kN/m ,又立柱自身重P =40kN ,a =0.5m ,h =10m ,试求立柱底部的约束反力。
1-1 画出下列各物体的受力图。
凡未特别注明者,物体的自重均不计,所有的接触面都是光滑的。
1-2画出下列各物体的受力图。
凡未特别注明者,物体的自重均不计,所有的接触面都是光滑的。
2-2 用几何法和解析法求图示四个力的合力。
已知,F3水平,F1=60KN ,F2=80KN ,F3=50KN ,F4=100KN 。
(F R =68.8N ,指向左上方且与水平成88°28′之角)2-4 用两根绳子AC 和BC 悬挂一个重G=1KN 的物体。
绳AC 长0.8m ,绳BC 长1.6m ,A 、B 点在同一水平线上,相距2m 。
求这两根绳子所受的拉力。
(F AC =0.974KN ;F BC =0.684KN )2-5 求门式钢架由于作用在B 点的水平力F 引起的A 、D 两支座的约束反力。
(F F A25,指向左下方且与水平成26°34′之角;F D =1/2F ,铅垂向上)2-12 求图示三铰钢架在水平力F 作用下所引起的A 、B 两支座的约束反力。
(F F F BA 22==,F A 指向右上方且与水平成45°之角,F B 指向右下方且与水平成45°之角)2-17 用一组绳挂一重量G=1KN 的物体M ,求各段绳的拉力。
设1、3两段绳水平,且α=45°,β=30°。
(F T1=1KN ;F T2=1.41KN ;F T3=1.58KN ;F T4=1.15KN )3-1 试计算如图所示各图中力F 对O 点的矩。
(Fl ;0;Flsin α;-Fa ;F(l+r);αsin 22b a F +)3-2 试求图中所示的力F对A点的矩。
已知r1=20cm,r2=50cm,F=30N。
(-15N·m)3-12 求图示各梁的支座反力。
(a. F Ax=0,F Ay=200KN,F B=150KN b. F Ax=0,F Ay=192KN,F B=288KN c. F Ax=0,F Ay=-45KN,F B=85KN e. F Ax=0,F Ay=F+ql,M A=Fl+ ql2/2)3-18 求图a多跨静定梁的支座反力。