PID逻辑模糊控制器仿真
- 格式:pdf
- 大小:481.91 KB
- 文档页数:6

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
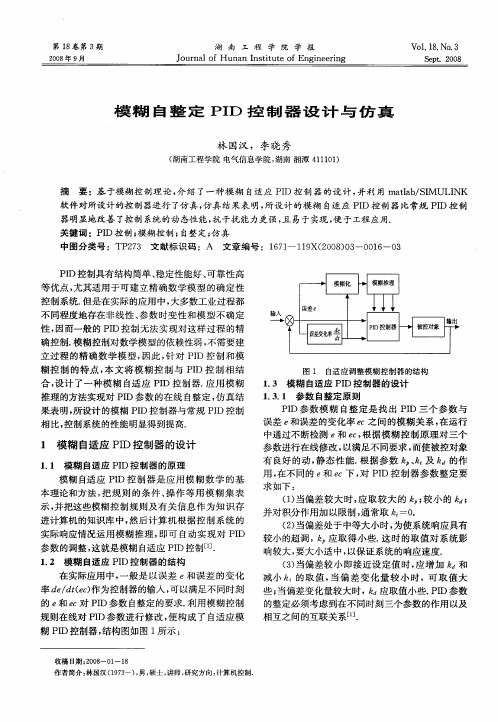
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
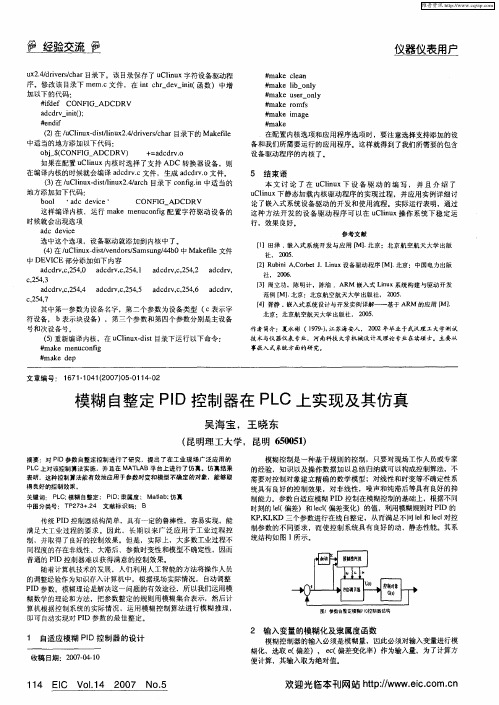
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。


下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs 设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。