50%
空间存储容量 为原有算法的
75%
Summary (总结)
得到优秀的结果的原因
1 在这里填写结果原因,在这里填写结果原因,在这里填写
结果原因,在这里填写结果原因。
2 在这里填写结果原因,在这里填写结果原因,在这里填写
结果原因,在这里填写结果原因。
3 在这里填写结果原因,在这里填写结果原因,在这里填写
输入输出都取正态分布 4)建立模糊规则:
Fuzzy Control Table
Simulation
Simulation Results
12
13
14
15
16
Solution (方案)
Simple
简单
Effective
有效
总结提出的方案,不仅简单,而且有效。
Result (成果)
1 一句话总结成果
Fuzzy Control System
Parameters setting
Fuzzy Control System
Parameters setting
1)选择输入输出变量: 输入:误差e和误差率ec 输出:Kp、Ki、Kd
2)确定语言变量: 基本论域:{-3,3},划分后
{NB,NM,NS,ZO,PS,PM,PB} 3)确定语言值隶属度函数:
统
系统 仿真
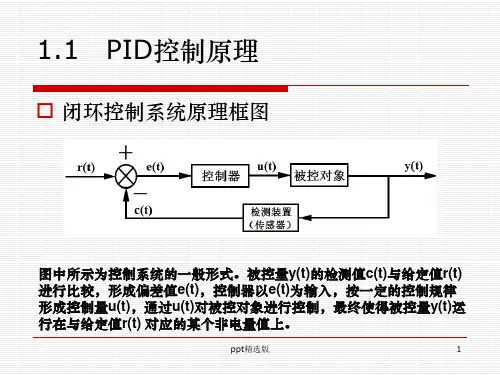
Abstract(摘要)
“ 本文主要介绍了PID和模糊PID控制的基本知识,模 糊PID控制器的应用,以非线性、长延时和多参数为 特征的工业液体混合过程。设计了一种基于改进型 模糊逻辑的模糊PID在线控制器。然后对传统的PID 算法、模糊PID算法和改进型模糊PID算法进行仿真, 对三条仿真曲线进行比对。 仿真结果表明:改进型模糊PID算法具有响应时间短, 过冲小,鲁棒性好,更好的稳定性。 由此得出结论:改进型模糊PID控制算法可以合理提 ” 高控制效果,实现实时的自适应调整液体混合参数