理论力学6刚体的基本运动
- 格式:ppt
- 大小:2.54 MB
- 文档页数:31

理论力学中的刚体运动与角速度的计算刚体是指具有一定形状和大小,其内部各点间相对位置不会发生改变的物体。
在理论力学研究中,刚体运动是一个重要且常见的问题,其中角速度的计算是关键的一部分。
本文将介绍刚体运动的基本概念和相关计算方法。
一、刚体运动的基本概念刚体的运动可以分为平动和转动两种形式。
平动是指刚体整体沿直线运动,而转动则是刚体围绕某个轴旋转运动。
在刚体转动的过程中,角速度是一个重要的物理量。
角速度表示刚体某一点在单位时间内绕轴旋转的角度。
通常用符号ω表示,计量单位是弧度/秒。
二、角速度的计算方法1. 定义式计算:对于旋转角速度恒定的情况,可以通过定义式计算角速度。
角速度ω等于单位时间内转过的弧长与转动所需时间的比值。
ω = Δθ / Δt其中,Δθ是转过的弧长,Δt是转动所需时间。
2. 瞬时角速度计算:在某一时刻的瞬时角速度等于通过该点的切线所确定的线速度与该点到轴的距离之比。
即,ω = v / r其中,v表示质点在切线方向上的线速度,r表示质点到该轴的距离。
3. 利用转动惯量计算:转动惯量是刚体抵抗转动的特性参数。
利用转动惯量的计算公式,可以推导出角速度的表达式。
比如,对于圆盘形刚体绕垂直于其平面并通过质心的轴转动的情况,转动惯量I和角速度的关系公式为:Iω = L其中,I表示转动惯量,L表示刚体的角动量。
三、刚体运动与角速度的应用角速度的计算在刚体运动的分析和应用中发挥着重要作用。
下面以两个实例介绍其应用。
实例一:自转的地球地球自转是一个典型的刚体运动问题。
地球自转一周的周期是24小时。
将地球看作一个近似的刚体,其转动惯量与角速度的乘积等于地球的角动量。
通过计算地球的转动惯量和已知的角动量,可以求得地球的角速度。
实例二:陀螺稳定陀螺是另一个常见的刚体运动问题。
陀螺的稳定性与其角速度密切相关。
通过计算陀螺的角速度,可以分析陀螺的稳定性,并设计出能够保持平衡的陀螺。
总结:刚体运动与角速度的计算是理论力学中的重要内容。

理论力学中的刚体运动与角动量的计算理论力学是研究物体运动的基本规律的科学。
刚体是理论力学中的重要概念之一,它指的是一个具有有限尺寸的物体,在运动中不发生形变的物体。
刚体运动及其角动量计算是理论力学中的重要内容,本文将从刚体运动的基本概念入手,介绍角动量的定义与计算方法。
1. 刚体运动的基本概念刚体运动是指刚体在空间中的运动。
刚体的转动可以分为平面运动和空间运动两种情况。
平面刚体运动是指刚体的所有点都在一个平面内运动,而空间刚体运动是指刚体的某些点在不同的平面内运动。
刚体运动可以分为平动和转动两个部分,平动是指刚体整体平移而不转动,转动则是指刚体绕某个轴线旋转。
2. 角动量的定义角动量是刚体运动中的重要物理量,它描述了刚体绕某个轴线旋转时的转动效果。
角动量的定义可以通过刚体质点系的线性动量来表示。
对于一个质点系来说,其角动量L可以表示为L=r×p,其中r为质点相对于参考点的位矢,p为质点的线性动量。
当质点系内的所有质点都绕同一个轴线旋转时,可以将整个质点系的角动量定义为各个质点的角动量之和。
3. 角动量的计算方法刚体绕固定轴线旋转时,可以利用角动量守恒定律来计算角动量的变化。
角动量守恒定律指出,当刚体受到外力时,其总角动量守恒,即刚体围绕固定轴线的角动量不变。
根据角动量守恒定律,可以通过刚体的质量分布和旋转速度来计算刚体的角动量。
当刚体质量分布均匀时,计算刚体的角动量较为简单。
可以使用以下公式来计算:L = I * ω其中L为角动量,I为刚体对于旋转轴的转动惯量,ω为刚体的角速度。
转动惯量I是描述刚体旋转惯性的物理量,其大小与刚体的质量分布以及旋转轴的位置有关。
当刚体质量分布不均匀时,计算刚体的角动量可以采用积分的方法进行计算。
通过将刚体分割成无限小的质量元,可以求得每个质量元的角动量,并将其累加得到整个刚体的角动量。
4. 刚体运动与角动量的应用刚体运动与角动量计算在物理学和工程学中有着广泛的应用。



本科毕业论文题目:刚体转动惯量及其计算方法目录1、引言 (1)2基本概念 (1)2。
1描述刚体位置的独立变量 (1)2.2 刚体运动的分类 (2)3 刚体力学中的质量和惯性 (2)3.1 刚体力学中的惯性运动 (2)3。
2 惯性运动在刚体力学中的应用 (3)4 刚体的几种基本运动 (3)4。
1 定轴转动 (3)4.2 刚体平面平行运动 (3)4。
3 定点转动 (4)4。
4 一般运动 (4)5 刚体转动惯量的计算方法 (4)5.1 转动惯量的引入 (4)5。
2 转动惯量的计算方法 (6)5.2.1定义法 (6)5.2.2惯量椭球法 (7)5.2.3 惯量主轴法 (8)5.2.4 实验方法测量 (9)5。
2。
5 陀螺运动的描述 (10)6 结论 (13)参考文献: (13)致谢.............................................. 错误!未定义书签。
刚体转动惯量及其计算方法摘要:在刚体动力学中,有大量的篇幅研究刚体的转动问题,无论是定轴转动、平面平行运动,还是绕定点的转动,其动力学方程中均含有转动惯量。
转动惯量在刚体力学中有很重要的的地位,相当于质点在动力学中的质量地位相当,应用较为广泛。
本文对质量各种分布刚体的转动惯量进行浅谈,及对定点转动问题进行定量分析。
关键词:刚体;运动;转动惯量;定点转动.本科毕业生毕业论文1、引言随着科学技术的迅猛发展,转动惯量作为一个重要的工程参数,在越来越多的领域受到重视,如何更方便,快捷,准确的计算转动惯量成为了一个迫切需要解决的问题。
转动惯量等于刚体中每个质元的质量与这一质元到转轴的垂直距离的平方的乘积的和,而与质元的运动速度无关。
与质点的平动动能比较而言,转动惯量相当于平动时的质量。
物体转动时转动惯量是表示物体在转动中惯性大小的量度.关于转动惯量的研究由来已久,现在所取得的成果就是前人一点一滴积累来的。
本文将在此基础上,本着循序渐进的原则,对转动惯量及多种计算方法进行探讨。


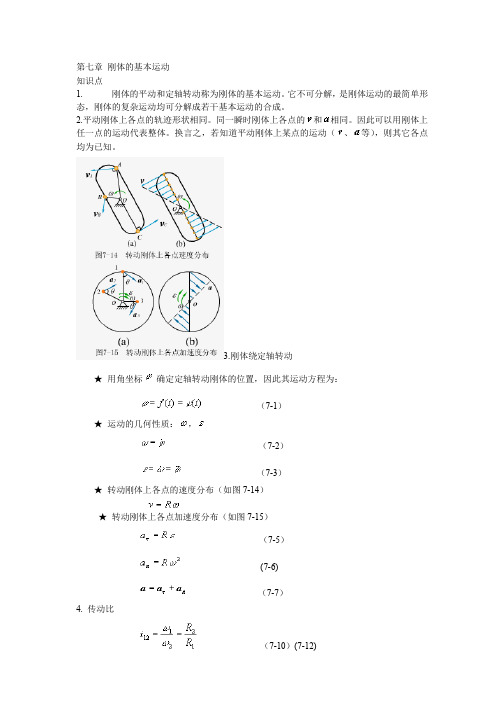
基础部分——运动学第5 章点的一般运动与刚体的基本运动一、运动学的研究对象及任务点刚体zz几何性质z合成分解例1例2例3例4例5例6二、学习运动学的目的三、运动学的分析方法矢量工具数值求解工具四、具体内容第5章点的一般运动与刚体的基本运动点的运动的矢量法点的运动的直角坐标法点的运动的弧坐标法一、运动方程二、轨迹三、点的速度O)(t r )(t t Δ+r vMM ′位矢四、点的加速度点的运动的矢量法一、运动方程点的运动的直角坐标法O rMxy z)(zy,x,xyz二、轨迹方程三、点的速度四、点的加速度AB点的运动的弧坐标法运动轨迹原点O 一、运动方程sMO)(−)(+正方向弧坐标s二、自然轴系主法线n 切线τ,指副法线b思考:共同点不同点)(t r M O三、点的速度⋅lim ⋅st s d d d d r⋅τ⋅=v tsv d d =)(t t Δ+r vM ′sΔO)(−)(+r Δτ四、点的加速度速度大小随时间的变化率方向ττa 22t d d d d tst v ==22t d d d d tst v a ==z切向tas t ΔΔ⋅→Δτ0lim⋅速度方向随时间的变化率z法向n a sΔΔτs ΔΔϕsd d ϕ→方向?n2n2taa +全t 讨论:加速减速[例5-1]纯滚动解:(1)运动方程运动方程=x =y (2)速度22yxv v +t ωcos 22−(3)切向、法向加速度思考:如何求速度投影加速度投影全加速度22a a yx +法向加速度2t2aa −曲率半径(4)运动方程(弧坐标)如何取弧坐标的原点?讨论:Array纯滚动速度为零加速度不为零5-4-1 平行移动(平移)任一直线z形状相同z速度相同z加速度相同5-4-2 定轴转动=矢量表示:=右手规则滑动矢量αωαkz线速度v(弧坐标法)Rv ω=Rna ta αta 方向?z加速度aRa α=t Ra 2n ω=2n2t aa +42ωα+t a α思考:过轴的任一条直线上θαθrωv ×=ααt a rαa ×=t na vωa ×=nr ωr×=td d αααx ′y ′z ′1O i ′j ′k ′rωv ×=[例5-2]解:r ω=+d d r tω−=avtr R +=22ππ[思考题]j i i k ⎜+′⎟⎜′⋅+′⎟′⋅提示:5-5-1 注意区别几组公式5-5-2 描述点的运动的其它方法点的一般运动与刚体基本运动点的一般运动刚体基本运动矢量法直角坐标法弧坐标法其它方法平移定轴转动5-5-3 本章知识结构框图补充:轮系的传动比一、齿轮传动z速度z 切向加速度外啮合内啮合=两齿轮之传动比:21=1 2112R R i ==ωω2112ωω=i 22211±=±=±=正号內啮合负号外啮合11±=外啮合转向推广:二、带轮(链轮)传动二、带轮(链轮)传动z z 皮带与带轮间无相对滑动。

理论力学运动学知识点总结第一篇:理论力学运动学知识点总结运动学重要知识点一、刚体的简单运动知识点总结1.刚体运动的最简单形式为平行移动和绕定轴转动。
2.刚体平行移动。
·刚体内任一直线段在运动过程中,始终与它的最初位置平行,此种运动称为刚体平行移动,或平移。
·刚体作平移时,刚体内各点的轨迹形状完全相同,各点的轨迹可能是直线,也可能是曲线。
·刚体作平移时,在同一瞬时刚体内各点的速度和加速度大小、方向都相同。
3.刚体绕定轴转动。
• 刚体运动时,其中有两点保持不动,此运动称为刚体绕定轴转动,或转动。
• 刚体的转动方程φ=f(t)表示刚体的位置随时间的变化规律。
• 角速度ω表示刚体转动快慢程度和转向,是代数量,以用矢量表示。
,当α与ω。
角速度也可• 角加速度表示角速度对时间的变化率,是代数量,同号时,刚体作匀加速转动;当α 与ω异号时,刚体作匀减速转动。
角加速度也可以用矢量表示。
• 绕定轴转动刚体上点的速度、加速度与角速度、角加速度的关系:。
速度、加速度的代数值为。
• 传动比。
一、点的运动合成知识点总结1.点的绝对运动为点的牵连运动和相对运动的合成结果。
• 绝对运动:动点相对于定参考系的运动;• 相对运动:动点相对于动参考系的运动;• 牵连运动:动参考系相对于定参考系的运动。
2.点的速度合成定理。
• 绝对速度:动点相对于定参考系运动的速度;• 相对速度:动点相对于动参考系运动的速度;• 牵连速度:动参考系上与动点相重合的那一点相对于定参考系运动的速度。
3.点的加速度合成定理。
• 绝对加速度:动点相对于定参考系运动的加速度;• 相对加速度:动点相对于动参考系运动的加速度;• 牵连加速度:动参考系上与动点相重合的那一点相对于定参考系运动的加速度;• 科氏加速度:牵连运动为转动时,牵连运动和相对运动相互影响而出现的一项附加的加速度。
• 当动参考系作平移或 = 0,或与平行时,= 0。





理论力学重点总结理论力学重点总结绪论1.学习理论力学的目的:在于掌握机械运动的客观规律,能动地改造客观世界,为生产建设服务。
2.学习本课程的任务:一方面是运用力学基本知识直接解决工程技术中的实际问题;另一方面是为学习一系列的后继课程提供重要的理论基础,如材料力学、结构力学、弹性力学、流体力学、机械原理、机械零件等以及有关的专业课程。
此外,理论力学的学习还有助于培养辩证唯物主义世界观,树立正确的逻辑思维方法,提高分析问题与解决问题的能力。
第一章静力学的基本公理与物体的受力分析1-1静力学的基本概念1.刚体:即在任何情况下永远不变形的物体。
这一特征表现为刚体内任意两点的距离永远保持不变。
2.质点:指具有一定质量而其形状与大小可以忽略不计的物体。
1-3约束与约束力1.自由体:凡可以在空间任意运动的物体称为自由体。
2.非自由体:因受到周围物体的阻碍、限制不能作任意运动的物体称为非自由体。
3.约束:力学中把事先对于物体的运动(位置和速度)所加的限制条件称为约束。
约束是以物体相互接触的方式构成的,构成约束的周围物体称为约束体,有时也称为约束。
4.约束力:约束体阻碍限制物体的自由运动,改变了物体的运动状态,因此约束体必须承受物体的作用力,同时给予物体以相等、相反的反作用力,这种力称为约束力或称反力,属于被动力。
5.单面约束、双面约束:凡只能阻止物体沿一方向运动而不能阻止物体沿相反方向运动的约束称为单面约束;否则称为双面约束。
单面约束的约束力指向是确定的,即与约束所能阻止的运动方向相反;而双面约束的约束力指向还决定于物体的运动趋势。
6.柔性体约束:为单面约束。
只能承受拉力,作用在连接点或假想截割处,方向沿着柔软体的轴线而背离物体,常用符号F T表示。
(绳索、胶带、链条)7.光滑接触面(线)约束:为单面约束,其约束力常又称为法向约束力。
光滑接触面(线)的约束力只能是压力,作用在接触处,方向沿着接触表面在接触处的公法线而指向物体,常用符号F N表示。

第六章 刚体的基本运动 习题全解[习题6-1] 物体绕定轴转动的运动方程为334t t -=ϕ(ϕ以rad 计,t 以s 计)。
试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解:角速度: 2394)34(t t t dt ddt d -=-==ϕω 角加速度:t t dtddt d 18)94(2-=-==ωα速度: )94(2t r r v -==ω)/(2)094(5.0|20s m r v t =⨯-⨯===ω)/(5.2)194(5.0|21s m v t -=⨯-⨯==切向加速度:rt t r a t 18)18(-=-==ρα法向加速度:22222)94()]94([t r rt r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+=)/(8165.0)094(0324|24220s m r a t =⨯=⨯-+⨯== )/(405.1581.305.0)194(1324|24221s m r a t =⨯=⨯-+⨯== 物体改变方向时,速度等于零。
即:0)94(2=-=t r v )(667.0)(32s s t ==[习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。
后因刹车,该点以)/(1.02s m t a t =作减速运动。
设轮半径R=0.4m,求M点在减速运动过程中的运动方程及t=2s时的速度、切向加速度与法向加速度。
解:t dtd a t 1.04.022-===ϕρα (作减速运动,角加速度为负)t dt d 25.022-=ϕ12125.0C t dtd +-=ϕ2130417.0C t C t ++-=ϕ12124.005.0)125.0(4.0C t C t dtd R v +-=+-⨯==ϕ104.0005.0|120=+⨯-==C v t图题46-251=C0000417.0|2130=+⨯+⨯-==C C t ϕ 02=C ,故运动方程为: t t 250417.03+=ϕt t t t R s 100167.0)250417.0(4.033+-=+-==ϕ速度方程:1005.02+-=t v)/(8.910205.0|22s m v t =+⨯-== 切向加速度:)/(2.021.01.0|22s m t a t t -=⨯-=-== 法向加速度:222)25125.0(4.0+-⨯==t a n ρω)/(1.240)252125.0(4.0|2222s m a t n =+⨯-⨯==[习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。

![理论力学第五章 点的运动和刚体的基本运动 [同济大学]](https://img.taocdn.com/s1/m/9038a70db52acfc788ebc909.png)
