BST纠偏系统调试手册
- 格式:doc
- 大小:84.50 KB
- 文档页数:5
![ekr500纠编系统操作手册+接线图[1]](https://uimg.taocdn.com/4ebffe3c87c24028915fc345.webp)
BST纠偏不正检查步骤一、控制器Pro Com50 是否报警(Error灯常亮)。
若报警检查1、物料的头部进入纠偏范围时不报警为好。
2、纠偏压棍是否压下,压棍的间隙是否一致。
3、压棍螺丝是否进入相机的观察范围。
二、检查控制器Pro Com50 的面板是否被锁(Lock灯常亮)若被锁,则根据手册做恢复出厂设置,然后设置电机的极限和回中位置,电机的参数。
三、物料头部偏差物料头部在未进入纠偏时,已超出纠偏范围。
(检查材料是否上正)四、检查电机的固定螺丝(造成S形的原因)五、检查物料的尺寸参数与BST设定尺寸。
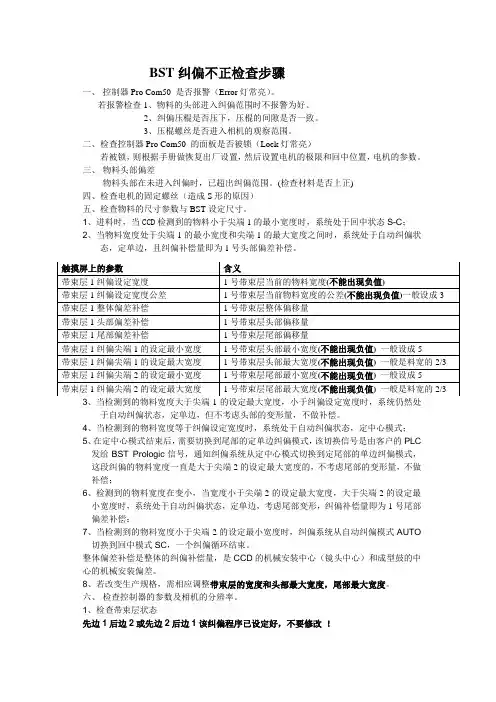
1、进料时,当CCD检测到的物料小于尖端1的最小宽度时,系统处于回中状态S-C;2、当物料宽度处于尖端1的最小宽度和尖端1的最大宽度之间时,系统处于自动纠偏状态,定单边,且纠偏补偿量即为1号头部偏差补偿。
于自动纠偏状态,定单边,但不考虑头部的变形量,不做补偿。
4、当检测到的物料宽度等于纠偏设定宽度时,系统处于自动纠偏状态,定中心模式;5、在定中心模式结束后,需要切换到尾部的定单边纠偏模式,该切换信号是由客户的PLC 发给BST Prologic信号,通知纠偏系统从定中心模式切换到定尾部的单边纠偏模式,这段纠偏的物料宽度一直是大于尖端2的设定最大宽度的,不考虑尾部的变形量,不做补偿;6、检测到的物料宽度在变小,当宽度小于尖端2的设定最大宽度,大于尖端2的设定最小宽度时,系统处于自动纠偏状态,定单边,考虑尾部变形,纠偏补偿量即为1号尾部偏差补偿;7、当检测到的物料宽度小于尖端2的设定最小宽度时,纠偏系统从自动纠偏模式AUTO 切换到回中模式SC,一个纠偏循环结束。
整体偏差补偿是整体的纠偏补偿量,是CCD的机械安装中心(镜头中心)和成型鼓的中心的机械安装偏差。
8、若改变生产规格,需相应调整带束层的宽度和头部最大宽度,尾部最大宽度。
六、检查控制器的参数及相机的分辨率。
1、检查带束层状态先边1后边2或先边2后边1该纠偏程序已设定好,不要修改!2、检查控制器状态3、检查相机的分辨率七、检查相机的参数1、总线情况2、CAN地址3、菜单结束行状况4、波形情况日常保养一、定期清洁高频光源。
BST纠偏不正检查步骤BST纠偏不正检查步骤一、控制器Pro Com50 是否报警(Error灯常亮)。
若报警检查1、物料的头部进入纠偏范围时不报警为好。
2、纠偏压棍是否压下,压棍的间隙是否一致。
3、压棍螺丝是否进入相机的观察范围。
二、检查控制器Pro Com50 的面板是否被锁(Lock灯常亮)若被锁,则根据手册做恢复出厂设置,然后设置电机的极限和回中位置,电机的参数。
三、物料头部偏差物料头部在未进入纠偏时,已超出纠偏范围。
(检查材料是否上正)四、检查电机的固定螺丝(造成S形的原因)五、检查物料的尺寸参数与BST设定尺寸。
1、进料时,当CCD检测到的物料小于尖端1的最小宽度时,系统处于回中状态S-C;2、当物料宽度处于尖端1的最小宽度和尖端1的最大宽度之间时,系统处于自动纠偏状态,定单边,且纠偏补偿量即为1号头部偏差补偿。
于自动纠偏状态,定单边,但不考虑头部的变形量,不做补偿。
4、当检测到的物料宽度等于纠偏设定宽度时,系统处于自动纠偏状态,定中心模式;5、在定中心模式结束后,需要切换到尾部的定单边纠偏模式,该切换信号是由客户的PLC 发给BST Prologic信号,通知纠偏系统从定中心模式切换到定尾部的单边纠偏模式,这段纠偏的物料宽度一直是大于尖端2的设定最大宽度的,不考虑尾部的变形量,不做补偿;6、检测到的物料宽度在变小,当宽度小于尖端2的设定最大宽度,大于尖端2的设定最小宽度时,系统处于自动纠偏状态,定单边,考虑尾部变形,纠偏补偿量即为1号尾部偏差补偿;7、当检测到的物料宽度小于尖端2的设定最小宽度时,纠偏系统从自动纠偏模式AUTO 切换到回中模式SC,一个纠偏循环结束。
整体偏差补偿是整体的纠偏补偿量,是CCD的机械安装中心(镜头中心)和成型鼓的中心的机械安装偏差。
8、若改变生产规格,需相应调整带束层的宽度和头部最大宽度,尾部最大宽度。
六、检查控制器的参数及相机的分辨率。
1、检查带束层状态先边1后边2或先边2后边1该纠偏程序已设定好,不要修改!2、检查控制器状态3、检查相机的分辨率七、检查相机的参数1、总线情况2、CAN地址3、菜单结束行状况4、波形情况日常保养一、定期清洁高频光源。
BST纠偏不正检查步骤
1.收集错误分类的样本:从分类器的输出结果中筛选出被错误分类的
样本。
这些样本将作为纠偏不正检查的对象。
3.形成纠偏训练集:将错误分类的样本与原始的训练集合并,形成一
个新的纠偏训练集。
4.重新训练分类器:使用上一步形成的纠偏训练集重新训练分类器。
可以选择使用相同的分类算法进行训练,也可以使用不同的算法进行对比
实验。
5.评估分类器性能:对重新训练的分类器进行性能评估,可以使用各
种评价指标,如准确率、召回率、F1值等。
6.再次检查错误分类样本:对评估后发现错误分类的样本进行再次检查,看是否已经被正确分类。
7.进一步纠偏处理:对于被评估后仍然错误分类的样本,可以考虑采
取更进一步的纠偏处理。
例如,可以使用更复杂的特征工程进行重新训练,调整分类器的参数等。
8.重复以上步骤:根据实际情况,可以多次迭代地进行纠偏检查和分
类器训练。
BST纠偏不正检查的核心在于发现并解决分类器的错误分类问题。
通
过对错误分类样本的纠偏处理,可以提高分类器的准确性和可靠性。
在实
际应用中,需要根据具体情况选择合适的纠偏策略,同时结合领域知识和
人工干预来进一步提高分类器的性能。
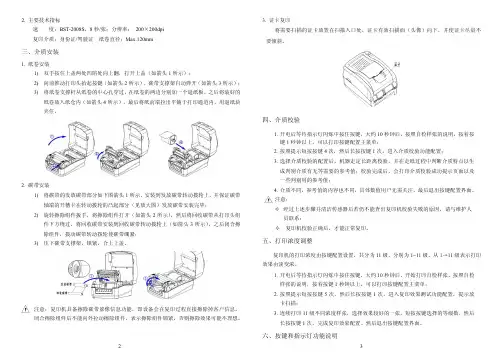
1,接线方式:(EKRPRO COM40)(1)电源24V (5A)接入(禁止220V接入)40:零线41:火线(2)传感器接入左电眼红外线超声波1 棕色2 棕色3 白色4 粉红色粉红色5 绿色绿色6 黄色黄色7 灰色灰色右电眼红外线超声波8 棕色9 棕色10 白色11 粉红色粉红色12 绿色绿色13 黄色黄色14 灰色灰色(3)中心开关(OMG4)15:粉红色17:黄色18:灰色(4)推动器(EMS5 EMS10 EMS16)42:棕色/白色43:粉红色/灰色注:推动器的接线要参考纠偏系统的运行情况而定。
故42,43两组线可调换接入端口2,部件设置:(1)按“MENU”键(2)用“向左的箭头”或“向右的箭头”选0(左电眼)(3)按“SETER”键,用“向左的箭头”或“向右的箭头”选210(选200为超声波)(4)按“ENTER”键(5)“向左的箭头”或“向右的箭头”选1(右电眼)(6)按“SETUP”键,用“向左的箭头”或“向右的箭头”选210(选200为超声波)(7)按“ENTER”键(8)“向左的箭头”或“向右的箭头”选3(中心开关)(9)按“SETUP”键,用“向左的箭头”或“向右的箭头”选101(0GM-4)(10)按“ENTER”键(11)按“MENU”键如果用单电眼选:(2)-(4)步或(5)-(7)步,其一便可:左电眼选:(2)-(4)步骤;右电眼选:(5)-(7)步骤;3,开关设置揭开面盖(1)圆形开关(S1)是联网用的;如非联网,指针始终指向1(2)如用EMS-5推动器,请将条形开关(S2)5拨到“ON”位置如用EMS-10推动器,请将条形开关(S2)5拨到“OFF”位置4,电眼设置(1)同时按“SETUP”和“向左的箭头”键(2)用物料遮挡电眼后即移走(3)按“ENTER”键(4)按电眼指示灯(如左电眼按“”和”,右电眼按“”和”,双电眼则同时按“”和“”)(5)按自动键“AUTO”5,按“对中”键,若不能自动对中,请将马达线42与43互换。

BST 自动化系统BST-et 1500-WWM使用手册BST Servo-Technik GmbHHeidsieker Heide 5333739 Bielefeld德国电话: 05206/999-0传真: 05206/999-999E-mail: info@1 软件简介本软件"BST-et 1500-WWM"用于纪录单轨或多轨水平测量,并将测量结果通过BST-et 1500传送至个人计算机.该软件的多模式操作必须具备BST”软件狗”才能实现.2 "演示"和"分析"模式可以免费使用.3 系统配置最低要求-操作系统:Windows 9x或Windows NT4.0以上-单个测量位置主频要求为奔腾®100,多个测量位置则要求有更高的主频.-32M内存4 软件运行的前提1)必须在用户手册的指导下使用et 1500.2)在1-2个端口上有et 1500的跨接 JX8.3)连接et 1500 (socket X4) 和计算机(串行接口)产品,数据线参数见36.629.00.4.30的连接手册.4)软件狗必须插在计算机并行接口上.5 软件的安装:·双击" Setup.exe"文件,启动安装程序.随后出现一个窗口,要求关闭所有其他运行的程序.关闭所有其他运行的程序,然后点击O.K.·点击这个按钮,开始安装.·如果你不想在给出的路径安装该程序,点击这个按钮.·结束安装,点击这个按钮.·安装过程中可能会出现如下提示:“访问拒绝”“服务已经存在”等等,这时可以选择”忽略”,或”是”以确认.这些提示的出现是因为现有版本的软件已经存在于目标计算机上,或正在执行.所以尽管出现这些提示,BST-et 1500-WWM程序仍将运行.注意:Windows操作系统必须用”小一”号字体.方法:用鼠标右键点击桌面,点击属性,再点击”设置”选项卡,双击窗口位置,选择”小一号字体”.6 点击”OK"确认设置,开始运行程序"BST-et 1500-WWM"6.1测量位置的设置双击文件BST-et 1500-WWM.exe,开始运行程序.这时出现开始窗口.打开顶部下拉菜单中的”工具”,点击”选项”.系统会弹出来一个对话框,用户可以进行设置.填入一个数字,确定需要监视的串行接口.这里表示监视标准通信端口1(COM-Port 1).这个选择框表示计算机的速度,必须与软件的传输速度一致.标准交换速度为9600波特.·选项”通过动态数据交换(DDE)与et 1500连接”,建立连接.·不要点击的选项:软件直接连接到通信端口.·选择选项:用该软件单独启动一个程序,在将这一程序连接到通讯端口,将该软件的数据交由DDE处理.何时使用何种连接方式:只有测量位置需要纪录时,et 1500才可以直接接到通信端口,因此不要点击这个选项,以节约动态数据交换(DDE)连结和数据传输的成本.如果需要纪录某几个数值,必须决定是将来自et 1500的数据分配到几个通信端口,还是只用一个通信端口,将数据通过DDE送至相应的纪录软件.例1 :将数据分配给数个通信端口:在这种情况下,计算机必须有数个串行通信端口,来自et 1500的数据线必须并行按比例分配.对速度较慢的处理器,我们推荐这种连接方式.例二: 例二:几个纪录器只使用一个通信端口这种连接需要额外的计算机资源,所以可以与处理速度较快的计算机(如300HZ以上)联网使用。
BST纠偏不正检查步骤
一、开展前准备
1、定义工作范围:确定要检查BST纠偏不正的内容,包括但不限于机构设置、职权转让以及职能绩效的检查。
2、结合使用环境:根据不同部门的业务特征,确定BST纠偏不正的具体内容,使其与业务特征关联起来,以提升纠偏的效率。
3、识别关键问题:建立纠偏识别分体系,以识别BST纠偏不正所涉及的业务层面的关键点,以便更好地把握纠偏重点。
4、确定工作报告:确定BST纠偏不正检查报告的内容,包括但不限于BST纠偏不正的识别、分类、分析和处理等。
5、确定整个纠偏过程:结合BST纠偏不正检查的整体思路,明确检查中的各个环节,以有效地落实整个纠偏过程。
二、正式开展
1、制定方案:根据检查范围,制定BST纠偏不正检查的方案,包括但不限于检查过程、检查对象、检查内容等。
2、实施检查:实施检查,通过实地进行检查确认,对BST纠偏不正进行实地分析和识别,形成检查基础数据。
3、分析数据:对检查基础数据进行分析,根据检查结果形成BST纠偏不正的分类识别。
4、整合结果:将检查基础数据和分类识别结果形成BST纠偏不正检查报告。
BST纠偏系统的使用注意事项及典型故障排除指南未定稿本手册包括BST纠偏系统的使用注意事项及典型故障排除指南, 使用对象主要为设备现场操作人员和设备部门的技术维护人员。
请仔细阅读,并按照该手册进行纠偏系统的操作。
目录一、BST纠偏系统主要部件的简要说明二、使用注意事项及常识三、更换部件时需要的设置四、纠偏部件非正常损坏的可能原因五、典型故障处理1、控制器EKR1000/15002、控制器EKR Pro系列3、数码传感器CCD和模拟传感器4、各种通讯模块、控制模块和电源模块5、可编程控制器Prologic6、触摸屏Protouch一、B ST纠偏系统主要部件的简要说明控制器EKR: 是接收传感器信号并且输出给推动器动作信号的机构,具有计算控制操作,型号有EKR1, EKR2,EKR1000(PDP), EKR2000,EKR1500(PDP), EKR Pro Com40, EKR Pro Com 50, EKR ProNet40等型号。
另有ET1500控制器用于测宽应用,可将像素值(Pixel)转换成长度值(mm)。
传感器:是检测物料位置变化信号的部件,有输出模拟量的红外传感器和超声波传感器等,型号有IR2001/IR2002/US2007等,还有反射式传感器R42D16,也有数字量的高精度数码传感器CCD系列,型号有CCD5000/CCD30000/CCD Pro 5000/ CCD Pro 30000等。
推动器:是推动纠偏支架带动物料移动完成纠偏动作的机构,目前在用的多数为电动推杆式,直流电机型号有EMS1 /EMS5 /EMS6 / EMS10/EMS16P /EMS17/ EMS20等,交流电机型号有EMS3 / EMS4。
也有驱动力更大的液压式推动器。
回中开关:是完成找回零位的一种传感器,回中位置即推动器的行程中心位置。
型号有OMG4/OMG8/CK37等。
纠偏系统是一个闭环的控制过程,由传感器检测物料的实际位置变化信号,再将信号传送给控制器,控制器将物料的实际位置和设定位置进行比较后再发出指令给推动器,推动纠偏支架带动物料一起移动,当物料到达所要求的位置时,纠偏动作完成。
BST纠偏系统的使用注意事项及典型故障排除指南未定稿本手册包括BST纠偏系统的使用注意事项及典型故障排除指南, 使用对象主要为设备现场操作人员和设备部门的技术维护人员。
请仔细阅读,并按照该手册进行纠偏系统的操作。
目录一、BST纠偏系统主要部件的简要说明二、使用注意事项及常识三、更换部件时需要的设置四、纠偏部件非正常损坏的可能原因五、典型故障处理1、控制器EKR1000/15002、控制器EKR Pro系列3、数码传感器CCD和模拟传感器4、各种通讯模块、控制模块和电源模块5、可编程控制器Prologic6、触摸屏Protouch一、B ST纠偏系统主要部件的简要说明控制器EKR: 是接收传感器信号并且输出给推动器动作信号的机构,具有计算控制操作,型号有EKR1, EKR2,EKR1000(PDP), EKR2000,EKR1500(PDP), EKR Pro Com40, EKR Pro Com 50, EKR ProNet40等型号。
另有ET1500控制器用于测宽应用,可将像素值(Pixel)转换成长度值(mm)。
传感器:是检测物料位置变化信号的部件,有输出模拟量的红外传感器和超声波传感器等,型号有IR2001/IR2002/US2007等,还有反射式传感器R42D16,也有数字量的高精度数码传感器CCD系列,型号有CCD5000/CCD30000/CCD Pro 5000/ CCD Pro 30000等。
推动器:是推动纠偏支架带动物料移动完成纠偏动作的机构,目前在用的多数为电动推杆式,直流电机型号有EMS1 /EMS5 /EMS6 / EMS10/EMS16P /EMS17/ EMS20等,交流电机型号有EMS3 / EMS4。
也有驱动力更大的液压式推动器。
回中开关:是完成找回零位的一种传感器,回中位置即推动器的行程中心位置。
型号有OMG4/OMG8/CK37等。
纠偏系统是一个闭环的控制过程,由传感器检测物料的实际位置变化信号,再将信号传送给控制器,控制器将物料的实际位置和设定位置进行比较后再发出指令给推动器,推动纠偏支架带动物料一起移动,当物料到达所要求的位置时,纠偏动作完成。
BST纠偏系统调校
一、电眼设置
(1)同时按“SETUP”和“←”键
(2)用物料遮挡电眼后即移走
(3)按“ENTER”键
(4)按电眼指示灯(如按左电眼、右电眼、左右电眼按键一同按)
(5)按自动键“Auto”
二、“对中”键,如果不能自动对中,调换马达线。
“自动”键,当物料往外移动时,支架向内修正;往内移动时,支架向外修正,否则,将内部条形码拨反码(如:原ON改为OFF、原OFF改为
ON)。
三、灵敏度调试
将物料放于纠偏支架和传感器上,分别按“AUTO”键和“SETUP”键后,通过“←”及“→”键增加及减少灵敏度,一般设定读数为5即可。
四、故障检修
1)驱动器/纠偏装置“振动”
系统灵敏度过高或材料张力不够造成,可以通过降低灵敏度或对张力进行调校解决。
2)驱动器反映太慢或纠偏检测不正确
系统灵敏度不够或材料张力太紧造成,可以通过提高灵敏度或对张力进行调校解决。
3)系统正常动作下更换材料后,传感器没有反应
材料变更,无法识别现有材料或传感器损坏,检查或重新设定传感器程序,并于遮挡传感器时用正处于检测的材料来遮挡。
4)正常生产线上的纠偏系统出现乱跑现象
调整进出料角度,修正为90°。
5)在没有材料时,驱动器/纠偏装置振动
受到外部干扰信号,检查屏蔽是否良好。
6)动作正常,但自动时系统偏向一边
检查系统的中心线和材料中心线是否吻合;
五、维护和保养
1)经常清洁传感器,用干抹布或纸巾擦拭探头即可
2)吹碳刷。
机械润滑。
3)清洁导辊杂物(如胶等)。
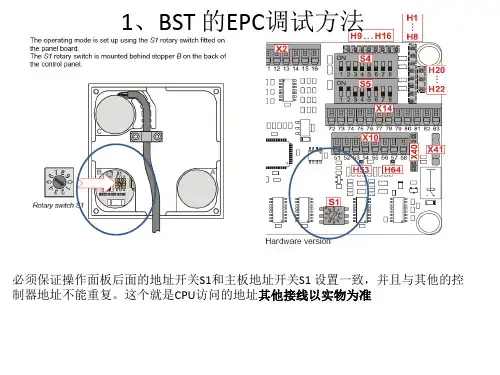
BST纠偏系统调试手册1,按照接线图检查纠偏的接线,确定纠偏接线正确。
X6,端子40接GND,端子41接+24V2。
2,检查, 开关均在OFF状态。
3,检查DIL , 开关均在OFF状态。
4,传感器1,X1:端子2、3、4、5、6、7分别接棕、白、粉、绿、黄、灰线传感器2,X2:端子9、10、11、12、13、14分别接棕、白、粉、绿、黄、灰线带位置反馈驱动器EMS17,X3:端子15、16、17、18分别接粉、绿、黄、灰线X7:端子42,43分别接棕、白线。
5,X16:端子81为公共端接+24V2,端子82接到PLC。
6,端子65接自动(UK222),端子64接回中(UK223),63接手动(UK221),62接0V2。
7,通过DIL 可以改变手动导向方向。
8,必须检查控制器是否处在“出场设置重置”状态,主要检查JX30跳线。
若是,必须取消。
具体设置方法见本文末尾9,进行参数初始设置如下:(1)传感器型号必须输入设置菜单。
(设置参数1到210)(2)开机调试前必须正确输入驱动器型号到设置菜单(设置参数3到数值102)步骤如下:①按下“MENU”,②通过“MINUS”或“PLUS”选择参数1或3③按下“SETUP”“ENTER”按键的指示灯亮起,同时“MENU”和“SETUP”按键的指示灯闪烁,液晶显示屏显示参数值设置④通过“MINUS”或“PLUS”设置参数到数值(参数1为210,参数3为102)⑤按下按键“ENTER”存储参数值按下“SETUP”取消输入,输入的参数值没有被存储。
原始参数保持未被更改状态,显示返回参数选择状态⑥按下按键“MENU”设置菜单关闭(3)开机调试前,必须完成以下操作:★把物料从现有的传感器观测范围中移去★清洁传感器镜头,主机设置如下:①同时按下“SET UP”和“MINUS”然后再松开这两个按键。
主机设置被激活。
②完全遮住传感器的镜头约2秒钟。
③传感器无遮挡至少2秒钟④按下按键“ENTER”。
使用说明:本手册使用于由BST EKR1000控制的纠偏系统的操作指导手册。
使用数码相机的纠偏系统一定要保证相机和灯管的安全和清洁。
使用模拟传感器定中心和定边时,一定要根据物料的宽度适时调整传感器的位置,同时确保在使用过程中传感器和物料不要接触,以免损坏传感器。
一.控制器EKR1000前面板二.EKR 1000功能键和键盘上的控制符号操作功能=预置功能=设置功能=三.操作模式选择需要的操作功能如下:按下按键’ AUTO’,此时纠偏系统根据设定的位置在自动状态下运行,按下按键‘MAN’.此时可以通过手动移动纠偏执行机构的位置,按如下步骤操作:a. 按下按键‘MAN’.b. 调整定位用按键‘+’或‘-’向相应的方向调整纠偏执行机构的位置。
按键‘S-C此时纠偏执行机构自动寻找回中开关的位置,并停到回中开关的触发位置,一般情况下,回中开关的位置就是设备的机械中心位置。
四.预置功能按下按键’.在自动运行状态下,以传感器检查到的物料左边缘为基准进行纠偏。
按下按键在自动运行状态下,以传感器检查到的物料左边缘为基准进行纠偏。
同时按下按键在自动运行状态下,以传感器检查到的物料中心为基准进行纠偏。
五.设定和控制功能5.1 调整传感器增益量条件:正常的自动运行状态下,也即:- 传感器有物料感应到- 驱动器没有达到行程的极限位置1. 按下按键‘AUTO’.2. 按下按键‘SET UP’.此时,控制器上的指示灯(H10---H19)自动切换到指示传感器增益值大小的状态3. 增加增益时按键直到导向设备开始振动. EKR1000的LED灯从指示灯10向指示灯19移动。
(指示灯19表示最大增益值,如果设备没有振动,推荐使用最大级别的增益)4. 减小增益调节用按键直到驱动装置稳定不出现抖动位置,如果需要进一步放慢响应速度,还可以再减小增益5. 按下按键‘ENTER’. 增益值被储存.六.调整回中开关增益量只对模拟量回中传感器适用,如OMG8、CK371. 同时按下按键‘S-C’ 和‘SET UP’.EKR1000上的指示灯(H10---H19)自动切换到指示回中开关的增益值.2. 增加增益按键直到导向设备开始振动. EKR1000的指示灯‘光点’ 从指示灯10到指示灯19移动。
德国BST纠偏器(系统)介绍
佚名
【期刊名称】《生活用纸》
【年(卷),期】2003(038)014
【摘要】@@ BST纠偏器(系统)是德国BST公司的产品,BST公司有60年生产各种类型纠偏器的历史,生产的纠偏器在世界上享有盛誉,其产品具有工作稳定、纠偏精确、反应灵敏、持久耐用及安装调试简单的诸多优点,广泛应用于无纺布、印刷及薄膜材料生产行业.
【总页数】2页(P41-42)
【正文语种】中文
【中图分类】TS7
【相关文献】
1.BST纠偏控制系统在双轴分切机上的应用 [J], 马海涛
2.德国BMS专业扬声器单元介绍 [J], 深圳市卓冠演艺设备有限公司
3.MSCSurv评估系统介绍——M/OD环境下载人航天器及航天员生存力评估系统介绍及对我国的发展启示 [J], 武江凯;韩增尧;庞宝君;张永
4.MSCSurv评估系统介绍——M/OD环境下载人航天器及航天员生存力评估系统介绍及对我国的发展启示 [J], 武江凯; 韩增尧; 庞宝君; 张永
5.为轮胎行业质量保证系统提供自动化服务的企业——记德国BST国际有限公司[J], 本刊记者
因版权原因,仅展示原文概要,查看原文内容请购买。
BST纠偏系统调试手册
1,按照接线图检查纠偏的接线,确定纠偏接线正确。
X6,端子40接GND,端子41接+24V2。
2,检查S2.3 , S2.4 开关均在OFF状态。
3,检查DIL S2.5 , S2.6 开关均在OFF状态。
4,传感器1,X1:端子2、3、4、5、6、7分别接棕、白、粉、绿、黄、灰线传感器2,X2:端子9、10、11、12、13、14分别接棕、白、粉、绿、黄、灰线
带位置反馈驱动器EMS17,X3:端子15、16、17、18分别接粉、绿、黄、灰线
X7:端子42,43分别接棕、白线。
5,X16:端子81为公共端接+24V2,端子82接到PLC。
6,端子65接自动(UK222),端子64接回中(UK223),63接手动(UK221),62接0V2。
7,通过DIL S2.2可以改变手动导向方向。
8,必须检查控制器是否处在“出场设置重置”状态,主要检查JX30跳线。
若是,必须取消。
具体设置方法见本文末尾
9,进行参数初始设置如下:
(1)传感器型号必须输入设置菜单。
(设置参数1到210)
(2)开机调试前必须正确输入驱动器型号到设置菜单(设置参数3到数值102)
步骤如下:
①按下“MENU”,
②通过“MINUS”或“PLUS”选择参数1或3
③按下“SETUP”
“ENTER”按键的指示灯亮起,同时“MENU”和“SETUP”按键的指示灯闪烁,液晶显示屏显示参数值设置
④通过“MINUS”或“PLUS”设置参数到数值(参数1为210,参数3为102)
⑤按下按键“ENTER”存储参数值
按下“SETUP”取消输入,输入的参数值没有被存储。
原始参数保持未被更改状态,显示返回参数选择状态
⑥按下按键“MENU”
设置菜单关闭
(3)开机调试前,必须完成以下操作:
★把物料从现有的传感器观测范围中移去
★清洁传感器镜头,主机设置如下:
①同时按下“SET UP”和“MINUS”然后再松开这两个按键。
主机设置被激活。
②完全遮住传感器的镜头约2秒钟。
③传感器无遮挡至少2秒钟
④按下按键“ENTER”。
按键“ENTER”和“SET UP”上的指示灯熄灭。
主机设置完成。
(4)材料设置
①a)临界对比度步骤:
★完全挡住传感器约2秒钟
按下“DARK/BRIGHT”,最暗值被储存
★传感器无遮挡至少2秒钟
按下“DARK/BRIGHT”,最亮值被存储
②按下“ENTER”材料设置完成
“ENTER”和“SETUP”上的指示灯熄灭。
b)物料中线导向设置步骤
①移除传感器感测范围内的物料并且清洁所有的传感器镜头!
②设置导向到“MAN”
③选择两个边缘传感器
④按下“SET UP”
“SET UP”上的指示灯亮起而“ENTER”上的指示灯开始闪烁。
⑤完全挡住传感器约2秒钟。
⑥传感器无遮挡至少2秒钟。
⑦按下“ENTER”材料设置完成
“ENTER”和“SETUP”上的指示灯熄灭。
(5)对行程极限的调整
①按下“MAN”并且再按下“SETUP”,稍后同时释放这两个键。
②用按键“MINUS”移动导向设备到想要得折返点1(限位1)。
③按下按键“SENSORLEFT”折返点位置被储存。
④用按键“PLUS”移动导向设备到想要得折返点2(限位2)
⑤按下按键“SENSOR RIGHT”,折返点位置被存储。
⑥按下按键“ENTER”
10,恢复出场设置(重置)
步骤:
a.切断控制器的电源
b.打开控制器的上盖
c.将跳线JX30 插上盖上控制器
d.给控制器上电
e.等约3 秒钟,控制器上的“RUN”指示灯重新开始闪动。
此时控制器以恢复到出厂设定值
f.切断控制器的电源
g.取下跳线JX30
h.给控制器上电。
注意:★当控制器发生不可恢复的错误时,可将其恢复出厂设置。
★完成重置将会删除控制器中存储的所有数据。
重置完成后,必须做一次第9条中的“参数初始设置”。