LPC-321纠偏系统
- 格式:doc
- 大小:75.50 KB
- 文档页数:1
论文说明书——带材纠偏装置控制系统(24页)一、项目背景随着我国工业自动化水平的不断提高,各类生产线对带材的质量要求也越来越高。
在实际生产过程中,带材跑偏现象时常发生,这不仅影响了生产效率,还可能导致产品质量下降。
为解决这一问题,我们研发了一套带材纠偏装置控制系统,旨在提高生产线的稳定性和带材的精度。
二、研究目的与意义1. 研究目的本论文旨在设计一套带材纠偏装置控制系统,通过对带材运行过程中的实时监测与调整,实现带材自动纠偏,降低生产过程中的故障率,提高生产效率。
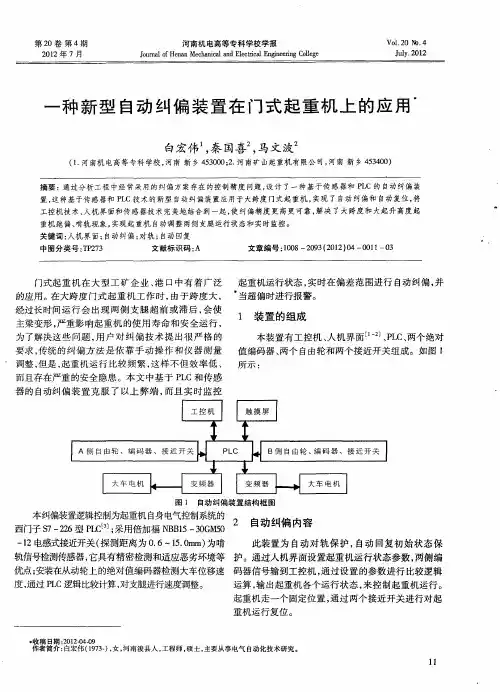
2. 研究意义(1)提高带材生产线的自动化程度,减轻操作工人的劳动强度;(2)确保带材在生产过程中的稳定运行,提高产品质量;三、系统设计原理1. 系统概述带材纠偏装置控制系统主要由检测部分、控制部分和执行部分组成。
检测部分负责实时监测带材的运行状态,控制部分根据检测到的数据进行分析处理,并输出控制信号,执行部分根据控制信号对带材进行纠偏。
2. 系统设计原理(1)检测部分:采用高精度传感器,实时监测带材的运行位置;(2)控制部分:采用PLC(可编程逻辑控制器)作为核心控制器,实现对检测数据的处理和分析;(3)执行部分:通过伺服电机驱动纠偏机构,实现对带材的实时纠偏。
四、系统硬件设计1. 传感器选型根据生产现场的实际需求,本系统选用精度高、响应速度快的光电传感器作为检测元件。
2. 控制器选型本系统选用性能稳定、抗干扰能力强的PLC作为核心控制器,实现对整个系统的实时监控与调整。
3. 执行机构选型根据纠偏力矩和响应速度的要求,本系统选用伺服电机驱动纠偏机构,确保带材在高速运行过程中的纠偏效果。
五、系统软件设计1. 软件架构带材纠偏装置控制系统的软件部分采用模块化设计,主要包括主控模块、检测模块、纠偏模块、通信模块和人机交互模块。
这样的设计便于后期维护和功能扩展。
2. 程序设计(1)主控模块:负责整个系统的启动、停止和异常处理,确保系统稳定运行;(2)检测模块:实时采集传感器数据,对带材位置进行监测;(3)纠偏模块:根据检测模块提供的数据,计算纠偏策略,并输出控制信号;(4)通信模块:实现PLC与上位机之间的数据交换,便于监控和调试;六、系统调试与优化1. 系统调试在硬件安装完成后,我们对带材纠偏装置控制系统进行了详细的调试。
纠偏(Guiding)
(型号美塞斯MC01Fife纠偏系统纠偏400/830/1898)
基本解释
[rectify a deviation] 改正偏向或偏差
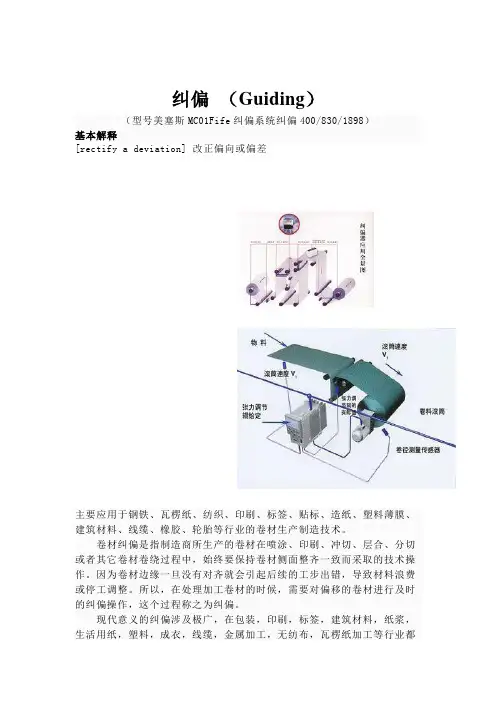
主要应用于钢铁、瓦楞纸、纺织、印刷、标签、贴标、造纸、塑料薄膜、建筑材料、线缆、橡胶、轮胎等行业的卷材生产制造技术。
卷材纠偏是指制造商所生产的卷材在喷涂、印刷、冲切、层合、分切或者其它卷材卷绕过程中,始终要保持卷材侧面整齐一致而采取的技术操作。
因为卷材边缘一旦没有对齐就会引起后续的工步出错,导致材料浪费或停工调整。
所以,在处理加工卷材的时候,需要对偏移的卷材进行及时的纠偏操作,这个过程称之为纠偏。
现代意义的纠偏涉及极广,在包装,印刷,标签,建筑材料,纸浆,生活用纸,塑料,成衣,线缆,金属加工,无纺布,瓦楞纸加工等行业都
制造者,此行业的行程标示中国工业包装的进步和突破,达到节能环保的理念。
据不完全统计,使用纠偏系统可节约材料百分之十到百分之二十左右。
节能减排,工业纠偏功不可没。
扩展
1.LPC(Line-edge Position Control)对线对边追踪装置是利用精确光电检知,来控制使卷材随时
能修正保持在整齐正确之位置上,亦称为纠偏。
它广泛的应用于各式产业机械中,能提升品质、降低损耗并减少人力,是产业自动化的幕后功臣。

纠偏系统工作原理一、介绍纠偏系统是一种常见的技术,用于对文本、语音或其他形式的数据进行纠错和纠偏。
本文将详细介绍纠偏系统的工作原理。
二、纠偏系统的基本原理纠偏系统的基本原理是通过对输入的数据进行分析、处理和比对,来判断输入数据是否存在错误,并尽可能地纠正这些错误。
下面将详细介绍纠偏系统的工作流程和各个环节。
2.1 数据预处理纠偏系统首先需要对输入的数据进行预处理。
这包括对输入数据进行分词、词性标注、句法分析等操作,以便更好地理解数据的结构和语义。
同时,也可以对数据进行去噪、过滤等操作,去除影响后续处理的干扰。
2.2 错误检测与定位在数据预处理之后,纠偏系统会对输入数据进行错误的检测和定位。
这包括对数据中的拼写错误、语法错误、语义错误等进行判断和标注。
系统可能会使用各种模型和算法来进行错误的检测和定位,例如基于规则的方法、基于统计的方法、基于机器学习的方法等。
2.3 候选生成在错误检测和定位之后,纠偏系统会根据错误的位置和可能的错误类型,生成一系列候选纠正结果。
这些候选纠正结果是正确结果和错误结果的替代品,系统会对这些候选纠正结果进行评估和排序。
2.4 纠正候选选择与生成纠偏系统会根据一定的评估准则,从候选纠正结果中选择最优的结果作为最终的纠正结果。
系统可能会使用各种评估准则和算法来进行选择和生成,例如基于语言模型的方法、基于上下文的方法、基于概率的方法等。
2.5 输出纠正结果最后,纠偏系统将最终的纠正结果输出给用户。
纠正结果可以是对输入数据的修正,也可以是对错误的标注和解释。
用户可以根据纠正结果进行相应的操作,例如修改文章、重新输入等。
三、纠偏系统的应用场景纠偏系统在各个领域都有广泛的应用。
下面将介绍一些常见的纠偏系统应用场景。
3.1 拼写纠错拼写纠错是纠偏系统的一个主要应用场景。
在文本编辑、搜索引擎等领域,拼写错误是一个常见且普遍存在的问题。
纠偏系统可以通过对输入的文本进行拼写检查和纠正,提供准确的结果。

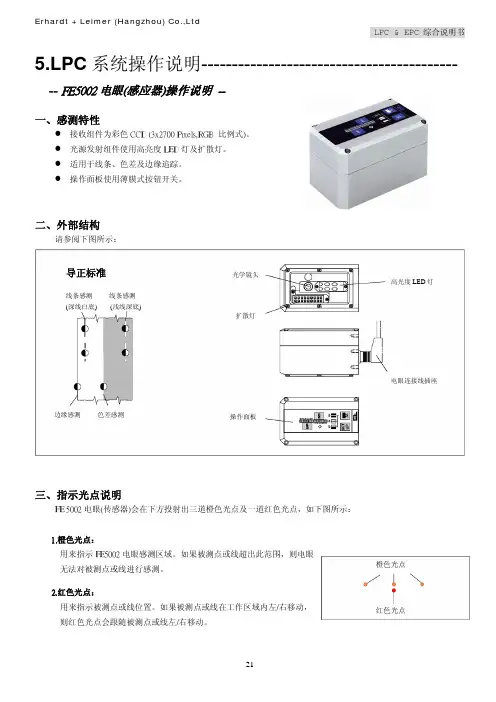
莱默尔(杭州)机电设备有限公司Erhardt+Leimer (Hangzhou) Co., Ltd.目 录1 功能介绍1.1 LPC 系统 (4)1.2 EPC 系统 (5)2 运用范例2.1 LPC/EPC 系统 (6)2.2 REELING STATION (7)2.3 PIVOTING FRAME (8)3 各系统配套件介绍3.1 LPC 电眼感测装置3.11 探线/边型: F E 5002 电眼(群组位罝0.3)…………………..9 3.2 EPC 电眼感测装置3.21 探边型: F R 5001 电眼(群组位置0.1/0.2)………………..10 3.22 探边型: F X 4030 电眼(群组位置0.1/0.2)………………..10 3.3 控制装置3.31 D C 1340控制器(用于100W 以下M o t o r ),群组位置0.5…...11 3.4 驱动装置3.41 A G 2491驱动器(240N ,25m m /s ,±12/25/50m m ).........................12 3.42 A G 2591驱动器(1000N /2500N ,24/10m m /s ,±25/50/75/100m m )......12 3.43 A G 2691驱动器(3000/5300N ,19/10m m /s ,±50/75/100/175m m )......13 3.44 A G 4081驱动器(250N ,21m m /s ,±6/25/50m m )..........................13 3.45 A G 4591驱动器(1000N ,24m m /s ,±25/50/75/100) (14)3.46 A G 4691驱动器(3000N ,25m m /s ,±25/50/75/100).....................14 3.47 A G 5791驱动器(10000N ,25m m /s ,±50/100/150/200/300m m )........15 3.48 A G 5891驱动器(20000N ,10m m /s ,±50/100/150/200/300m m )........15 3.49 A G 6791驱动器(10000N ,25m m /s ,±50/100/150/200/300m m )........16 3.50 A G 6891驱动器(20000N ,10m m /s ,±100/150/200/300m m )............16 3.5 中心回归装置 (17)以上红色记号处为此份说明书之重点部份以上红色记号处为此份说明书之重点部份4 各系统配套件功能键/指示灯说明4.1感测装置4.11 F E 5002电眼………………………………………………………19 4.12 F R 5001 / F X 4030电眼………………………………………… 20 4.2控制装置5 LPC 系统操作说明................................................... 21 6 EPC 系统操作说明................................................... 28 7 各装置群组位置及参数值运用说明.................... 29 8 各装置参数表 (34)9按装及试车说明 (53)10各装置尺寸图 (58)11 选配系统说明 / 公司信息…………………………………………..684.整套系统均采用数字式控制,因此可与计算机或PLC系统联机,可单点多机控制,亦可单机多点控制。

1. CCD纠偏系统:(对中纠偏、定边纠偏)控制器:EKR1000传感器:CCD5000/28传感器支架:FJ/25伺服电机:EMS16 备注:常用电机推力420,840,1700,3900N ;常用电机行程50,100,200mm 。
回中开关:OMG8高频灯:PDFV1/18 备注:根据物料检测宽度选择不同长度的高频灯,常用型号:PDFV1/18检测宽度460mm;PDFV1/36检测宽度1080mm; PDFV1/58检测宽度1380mm)备注:传感器可自动检测物料宽度变化,物料宽度变化时对纠偏工作没有影响,无需人为进行设置。
2. 红外线纠偏系统:控制器:EKR1000传感器:IR2001/10/100 备注:常用传感器开口(50,100,150mm)传感器支架:FJ1/20伺服电机:EMS16 备注:常用电机推力420,840,1700,3900N ;常用电机行程50,100,200mm 。
回中开关:OMG8备注:可细分为两种类型:定边纠偏和对中纠偏。
其中定边纠偏系统:只需一个传感器一个支架;对中纠偏系统:需两个传感器两个支架。
3. 红外线纠偏系统:控制器:EKR1000传感器:IR2002 备注:传感器与反射信号板分离,没有开口大小的限制,便于安装,有利于保护传感器不受损坏。
传感器支架:FJ1/20伺服电机:EMS16 备注:常用电机推力420,840,1700,3900N ;常用电机行程50,100,200mm回中开关:OMG8备注:可细分为两种类型:定边纠偏和对中纠偏。
其中定边纠偏系统:只需一个传感器一个支架;对中纠偏系统:需两个传感器两个支架。
4. 红外线纠偏系统:控制器:EKR PRO com 40传感器:IR2001/10/100 备注:常用传感器开口(50,100,150mm)传感器支架:FJ1/20伺服电机:EMS16 或EMS17(EMS17电机内部自带回中开关、保护限位)备注:常用电机推力840,1700,3900N ;常用电机行程50,100,200mm回中开关:OMG8备注:可细分为两种类型:定边纠偏和对中纠偏。


单片机控制的纠偏系统的软硬件开发
张兴梅;刘延俊
【期刊名称】《山东工业大学学报》
【年(卷),期】1996(26)1
【摘要】简述了单片机控制的带材纠偏系统的工程原理,并对所采用的单片机进行了扩展,按照PD控制算法编制了纠偏控制软件。
【总页数】4页(P75-78)
【作者】张兴梅;刘延俊
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP273
【相关文献】
1.单片机控制的液压伺服纠偏系统设计 [J], 姜良诚
2.一种水质监测单片机系统的软硬件开发 [J], 邓宏一;金文光;吉吟东;朱善君
3.由单片机构成的时间顺序控制系统的输出控制失误及软硬件对策 [J], 王春晓
4.浅析STC单片机软硬件控制系统的开发设计 [J], 许中璞
5.基于89C51单片机控制的包装机自动纠偏系统 [J], 蒋焕新
因版权原因,仅展示原文概要,查看原文内容请购买。