线性定常连续系统离散化的一种简单方法
- 格式:pdf
- 大小:98.78 KB
- 文档页数:5
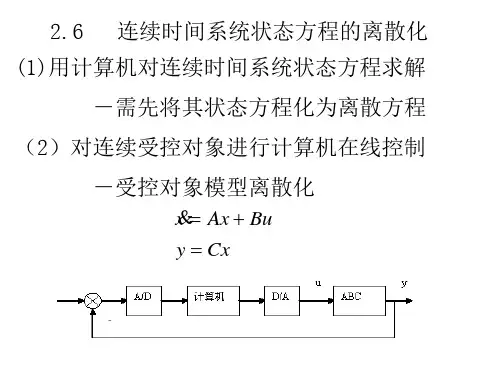
§2.3 线性连续时间状态空间表达式的离散化如果用数字计算机对连续时间状态方程求解,或者对连续受控对象采用数字计算机进行在线控制,都要碰到一个将连续时间系统化为离散时间系统的问题。
本节将讨论线性连续时间状态空间表达式的离散化方法。
一、线性时变系统的离散化 设原线性系统的状态空间表达式为:).()t (u )t (D )t (X )t (C Y )t (u )t (B )t (X )t (A X612⎩⎨⎧+=+=离散化后状态空间表达式为:[]).()kT (u )kT (D )kT (X )kT (C )kT (Y )kT (u )kT (H )kT (X )kT (G T )k (X 6221⎩⎨⎧⋅+⋅=+=+式(2.61)、(2.62)之间的系数关系如下[][]).()t (D )kT (D )t (C )kT (C d )(B ,T )k ()kT (H kT ,T )k ()kT (G kTt kT t T)k (kT632111==+==+=+=⎰τττφφ式中[]kT ,T )k (1+φ表示)t ,t (0φ在kT t T )k (≤≤+1区段内的状态转移矩阵,而)t ,t (0φ则表示原连续系统(2.61)式的状态转移矩阵。
证明:由上节(2.60)式可知(2.61)式的解为:).(d )(u )(B ),t (X )t ,t ()t (X t t 642000ττττφφ⎰+=对上式离散化,令hT t ,T )k (t =+=01,T 为采样周期,则得[][][]).(d )(u )(B ,T )k (X hT ,T )k (T )k (X T )k (hT65211110ττττφφ+++=+⎰+再以hT t ,kT t ==0代入(2.64)式,则得 ).(d )(u )(B ),kT (X )hT ,kT ()kT (X kT hT 6620ττττφφ⎰+=将(2.66)式两边同左乘[]kT ,T )k (1+φ,得[][][][][]).(d )(u )(B ,T )k (X hT ,T )k (d )(u )(B ),kT (kT ,T )k (X )hT ,kT (kT ,T )k ()kT (X kT ,T )k (kT hT kT hT 6721111100ττττφφττττφφφφφ+++=++⋅+=+⎰⎰将(2.65)式减去(2.67)式得:[][][]).(d )(u )(B ,T )k ()kT (X kT ,T )k (T )k (X T )k (kT 6821111ττττφφ+++=+⎰+上式中,令[][]τττφφd )(B ,T )k ()kT (H kT ,T )k ()kT (G T)k (kT⎰+=+=+111设在区间[]T )k (,kT 1+内,)kT (u )(u =τ,则(2.68)式可简写成: [])kT (u )kT (H )kT (X )kT (G T )k (X ⋅+⋅=+1 同时,对(2.61)式输出方程离散化,则证明了)kT (u )kT (D )kT (X )kT (C )kT (Y ⋅+=二、线性时不变系统的离散化 对于线性时不变系统).(uD X C Y u B X A X692⎩⎨⎧+=+=离散化状态空间表达式为).()kT (u D )kT (X C )kT (Y )kT (u )T (H )kT (X )T (G T )k (X 7021⎩⎨⎧+=+=+其中D ,C ),T (H ),T (G 均为常数阵,且).(B)d e ()T (H e)T (G A T AT 7120⎪⎩⎪⎨⎧==⎰ττ证明:由于时不变系统是时变系统的一种特殊情况,所以只需要证明式(2.71)成立即可。
连续系统的状态变量方程求解连续系统的状态变量方程求解通常采用数值方法,例如龙格-库塔法(Runge-Kutta)等。
在这个过程中,需要将连续系统的状态方程离散化,即将连续时间步长的微分方程转化为离散时间步长的离散方程。
求解离散方程可采用递推的方式,根据系统的初始条件和上一时刻的状态变量值,计算出当前时刻的状态变量值。
以下是一个求解连续系统状态变量方程的步骤:1. 确定连续系统的状态变量方程。
例如,给定线性定常系统dx/dt = Ax + Bu,其中x为状态变量,A和B为系统矩阵。
2. 离散化。
将状态变量方程转化为离散方程。
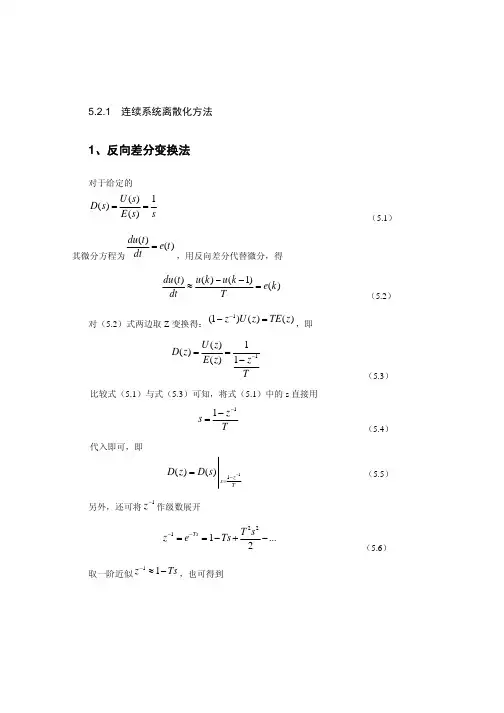
常见的离散化方法有前项差分变换、后项差分变换和Tustin变换。
具体变换方法取决于系统的特性以及所需的数值稳定性和精度。
例如,使用Tustin变换将连续系统离散化,得到离散状态方程x[k+1] = A*x[k] + B*u[k]。
3. 初始化。
给定初始条件,如x[0] 和u[0],初始化状态变量值。
4. 数值求解。
使用数值方法(如龙格-库塔法)递推计算离散方程,得到一系列状态变量值x[1], x[2], ...,以及对应的输出值y[1], y[2], ...。
5. 分析结果。
根据求解得到的状态变量值和输出值,分析系统的性能,如稳定性、收敛速度等。
在MATLAB中,可以使用ode45等函数求解连续系统的状态变量方程。
以下是一个简单的示例:```MATLAB定义系统矩阵A、B和输入信号uA = [1 0; -1 1];B = [0 1];u = [1; 0.5];定义初始条件x0 = [1; 2];设置求解参数tspan = [0, 10];options = odeset('RelTol', 1e-6, 'AbsTol', 1e-6);求解状态变量方程[x, u] = ode45(@(t, x) A*x + B*u, tspan, x0, options);绘制状态变量曲线figure;plot(t, x(:, 1), 'b', 'LineWidth', 2);hold on;plot(t, x(:, 2), 'r', 'LineWidth', 2);xlabel('Time');ylabel('State Variables');legend('x1', 'x2');```这个示例中,我们使用ode45函数求解了一个线性定常系统在给定输入信号下的状态变量演化。

连续状态方程离散化方法
连续状态方程离散化方法是一种将连续状态方程在离散空间上进行求解的
方法,它有助于简化数学模型的复杂性,加速计算的速度,并且能够更好地理解模型的工作原理。
连续状态方程是指描述化学反应或物理过程的数学方程,它通常包含在化学或物理手册中,用于描述反应或物理过程在不同条件下的动力学行为。
然而,由于连续状态方程通常包含大量参数,因此很难通过直接数值求解得到准确的解,需
要进行离散化处理。
离散化方法可以将连续状态方程转化为一组离散变量的线性方程,这些方程在离散空间上进行求解,从而得到数值解。
这种方法通常用于计算化学反应的速率、能量代谢率、热力学问题等领域。
离散化方法的基本思想是将连续状态方程转化为离散变量方程,然后通过数值求解的方法得到数值解。
离散化方法的具体方法包括差分法、插值法、拟牛顿法等。
其中,差分法是最常用的方法之一,它通过将连续状态方程离散化为一组离散变量方程,然后通过求解离散变量方程得到数值解。
除了差分法外,还有其他离散化方法,例如基于迭代法的插值法,以及基于有限元方法的拟牛顿法。
这些方法的选择取决于具体的应用场景和求解要求。
连续状态方程离散化方法的应用范围非常广泛,例如用于计算化学反应速率、热力学问题、生物分子的运动等。
此外,离散化方法还可以与其他数值方法相结合,例如有限差分法、有限元法等,用于解决更加复杂的问题。
在实际应用中,需要根据具体问题的特点选择合适的离散化方法,并进行合
理的参数设定和模型修正,才能得到准确的数值解。
因此,连续状态方程离散化方
法在实际应用中具有广泛的应用前景。
1.为什么要对连续系统进行离散化?离散化有哪些方法?它们各自的特点是什么?因为连续系统在电脑上无法实现,只能把连续系统离散化,而离散华是将连续变化的模拟量信号,转换成数字量(脉冲)信号,但是这里的离散化是非常密集的,在误差允许的范围内,可以非常的逼近原函数.这样就能用数字电子计算机(电脑)进行计算或处理。
1.前向差分法S平面左半平面得极点可能映射到Z平面单位圆外,这种方式所得到得离散滤波器可能不稳定2.后向差分法变换计算简单;S平面得左半平面映射到Z平面得单位圆内部一个小圆内因此如果D(s)稳定则变换后的D(z)也稳定;离散滤波器得过程特性及频率特性同原连续滤波器比较有一定得失真,需要较小得采样周期T。
3.双线性变换法如果D(s)稳定,则相应得D(z)也稳定;D(s)不稳定,则相应的D(z)也不稳定;所得D(z)的频率响应应在低频段与D(s)得频率响应相近,而在高频段相对于D(S)得频率响应有严重畸变。
4.脉冲响应不变法D(z)和D(s)有相同得单位脉冲响应序列;若D(z)稳定,则D(s)也稳定;D(z)存在着频率失真。
该法特别适用于频率特性为锐截止型的连续滤波器的离散化。
主要应用于连续控制器D(s)具有部分分式结构或能较容易地分解为并联结构,以及D(s)具有陡衰减特性,且为有限带宽得场合。
这时采样频率足够高,可减少频率混叠影响,从而保证D(z)得频率特性接近原连续控制器D(s)。
5.阶跃响应不变法若D(s)稳定,则相应的D(z)也稳定;D(z)和D(s)得阶跃响应序列相同;6.零极点匹配法需要先求出连续传递函数得全部零极点,计算复杂;能够保持变换前后特征频率处得增益不变;不改变系统得稳定区域,变换前后G(z)和G(s)的稳定特性不变2.多输入/多输出系统能控性和能观测性与系统传递函数矩阵的关系如何?在单输入单输出系统中,能控且能观测得充分必要条件是传递矩阵G (s )的分母与分子之间不发生因子相消。