连续系统离散化方法
- 格式:pdf
- 大小:131.93 KB
- 文档页数:14
第6章连续系统的离散化方法及近似解在连续系统中,我们经常需要将其离散化为离散系统以便于分析和求解。
离散化方法能够将连续系统的微分方程转化为差分方程,从而得到近似解。
本章将介绍连续系统的离散化方法及近似解的计算。
连续系统的离散化方法有许多种,常见的有Euler方法、Runge-Kutta方法和有限差分方法等。
其中,Euler方法是最简单和最基础的离散化方法,其基本思想是将连续时间轴划分为若干个小时间间隔,并用差分逼近连续系统的导数。
具体地,对于一阶常微分方程:\[\frac{{dy}}{{dt}} = f(y, t)\]可以使用Euler方法将其离散化为:\[y_{n+1} = y_n + h \cdot f(y_n, t_n)\]其中,\(y_n\)是时间点\(t_n\)的近似解,\(h\)是时间步长。
Runge-Kutta方法是一种更精确的离散化方法,其基本思想是利用多个中间步骤来更准确地逼近连续系统的导数。
常见的是四阶Runge-Kutta 方法,其公式为:\[y_{n+1} = y_n + \frac{h}{6} \cdot (k_1 + 2k_2 + 2k_3 +k_4)\]其中\[k_1=f(y_n,t_n)\]\[k_2 = f(y_n + \frac{h}{2}k_1, t_n + \frac{h}{2})\]\[k_3 = f(y_n + \frac{h}{2}k_2, t_n + \frac{h}{2})\]\[k_4 = f(y_n + hk_3, t_n + h)\]这样可以得到更准确的近似解。
有限差分方法是一种常用的离散化方法,其基本思想是将连续的导数用差分逼近。
以二阶偏微分方程为例,该方程的一般形式为:\[\frac{{\partial^2u}}{{\partial x^2}} +\frac{{\partial^2u}}{{\partial y^2}} = f(x, y)\]可以使用中心差分公式将其离散化为:\[\frac{{u_{i+1,j} - 2u_{i,j} + u_{i-1,j}}}{{\Delta x^2}} + \frac{{u_{i,j+1} - 2u_{i,j} + u_{i,j-1}}}{{\Delta y^2}} =f_{i,j}\]其中,\(u_{i,j}\) 是近似解在网格点 \((i, j)\) 处的值,\(\Delta x\) 和 \(\Delta y\) 分别是网格在 \(x\) 和 \(y\) 方向的步长,\(f_{i,j}\) 是离散化后的右侧函数。
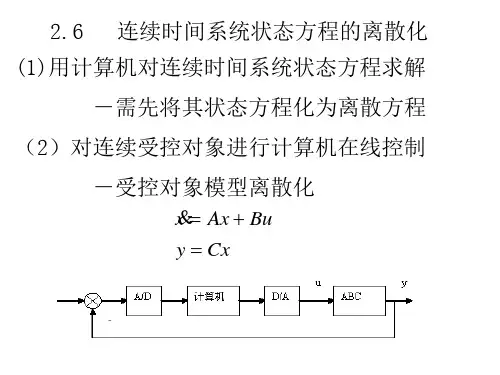
计算机控制06离散化设计与连续化设计方法离散化设计方法是指将连续系统离散化为离散系统的设计方法。
在离散化设计中,连续系统的时间和状态被离散化成一系列离散时间和状态。
离散化设计的基本原理是将连续时间转换为离散时间,将连续状态转换为离散状态。
离散化设计的方法主要包括离散化采样和离散化控制。
离散化采样是指将连续时间变量转换为离散时间变量的方法。
常见的采样方式有周期采样和非周期采样。
周期采样是指以固定时间间隔对连续时间进行采样,而非周期采样是指根据需要对连续时间进行不规则的采样。
离散化采样的目的是为了得到连续系统在离散时间点上的状态。
离散化控制是指将连续控制转换为离散控制的方法。
离散化控制的关键是将连续时间域的控制器转换为离散时间域的控制器,以实现对离散系统的控制。
离散化控制的常用方法包括脉冲响应、零阶保持和减少模型等。
离散化设计方法在很多领域都有应用。
在工业领域,离散化设计可以应用于过程控制系统、机器人控制系统和自动化生产线等。
在交通系统中,离散化设计可以应用于交通信号控制系统和车辆路线规划等。
在电力系统中,离散化设计可以应用于电力系统调度和电网控制等。
离散化设计方法可以提高系统的控制性能和稳定性,并且可以减少系统的复杂度和计算量。
连续化设计方法是指将离散系统连续化的设计方法。
在连续化设计中,离散系统的时间和状态被连续化为连续时间和状态。
连续化设计的基本原理是将离散时间转换为连续时间,将离散状态转换为连续状态。
连续化设计的方法主要包括插值方法和逼近方法。
插值方法是指根据已有离散数据点的值,通过插值技术推导出在两个离散数据点之间的连续数据点的值。
插值方法的常见技术有线性插值、多项式插值和样条插值等。
插值方法的目的是为了得到在离散系统状态之间的连续状态。
逼近方法是指通过逼近离散时间的函数来表示离散状态之间的连续状态。
逼近方法的常见技术有函数逼近、泰勒展开和傅里叶级数展开等。
逼近方法的目的是为了得到在离散系统状态之间的连续时间。
连续系统离散化方法连续系统离散化方法是一种常用的数值计算方法,它将连续系统转化为离散系统,从而使得计算机可以进行处理。
本文将从离散化方法的定义、应用、实现以及优缺点等方面进行介绍。
一、离散化方法的定义离散化方法是指将连续系统转化为离散系统的过程。
在计算机中,所有的数值都是离散的,而实际上很多系统是连续的,比如电路、机械系统、化学反应等等。
离散化方法就是将这些连续系统转化为可以在计算机中处理的离散系统。
离散化方法可以通过采样和量化来实现。
二、离散化方法的应用离散化方法在很多领域都有应用,比如电路设计、控制系统设计、信号处理等等。
在电路设计中,离散化方法可以将连续电路转化为数字电路,从而实现数字信号的处理。
在控制系统设计中,离散化方法可以将连续控制器转化为数字控制器,从而实现数字化自动控制。
在信号处理中,离散化方法可以将连续信号转化为数字信号,从而实现对信号的数字处理。
三、离散化方法的实现离散化方法的实现可以通过采样和量化来实现。
采样是指对连续信号进行离散化,将其转化为一系列的采样值。
量化是指对采样值进行离散化,将其转化为一系列的离散数值。
采样和量化的具体实现方式包括正弦采样、脉冲采样、最大值采样、平均值采样等等。
量化的具体实现方式包括线性量化、对数量化、非线性量化等等。
四、离散化方法的优缺点离散化方法的优点是可以将连续系统转化为离散系统,从而可以在计算机中进行处理。
离散系统具有稳定性、可控性、可观性等优点。
离散化方法的缺点是会引入误差,因为离散化过程中会丢失一些信息。
此外,离散化方法需要选取适当的采样周期和量化精度,否则会影响系统的性能。
离散化方法是一种常用的数值计算方法,它将连续系统转化为离散系统,从而使得计算机可以进行处理。
离散化方法的应用广泛,包括电路设计、控制系统设计、信号处理等等。
离散化方法的实现可以通过采样和量化来实现。
离散化方法既有优点,又有缺点,需要在具体应用中对其进行合理的选择和设计。
z变换形式离散化的几种方式
在连续系统离散化中,常用的有后向差分离散化方式和双向差分离散化方式。
下面以后向差分离散化为例进行说明,其曲线的斜率表示为:$\frac{T_s}{n}$,这种离散化表示成z变换形式就是:$Z[x(n)]=\frac{X(z)}{z^{nT_s}}$,其中,$T_s$为系统采样时间。
通过对连续系统表达式进行拉普拉斯变换,可以得到理想状态下的PID控制器表达式。
为了在控制器或者计算机系统中实现PID计算,必须将该表达式离散化为离散系统。
将后向差分Z变换表达式带入连续系统拉普拉斯变换表达式,得到增量式PID的差分表达式,其中$K_p$为比例系数、$T_i$为积分时间、$T_d$为微分时间、$T_s$为系统采样时间。
总之,z变换形式离散化的方式有很多种,在实际应用中需要根据具体情况选择合适的方法。
1.为什么要对连续系统进行离散化?离散化有哪些方法?它们各自的特点是什么?因为连续系统在电脑上无法实现,只能把连续系统离散化,而离散华是将连续变化的模拟量信号,转换成数字量(脉冲)信号,但是这里的离散化是非常密集的,在误差允许的范围内,可以非常的逼近原函数.这样就能用数字电子计算机(电脑)进行计算或处理。
1.前向差分法S平面左半平面得极点可能映射到Z平面单位圆外,这种方式所得到得离散滤波器可能不稳定2.后向差分法变换计算简单;S平面得左半平面映射到Z平面得单位圆内部一个小圆内因此如果D(s)稳定则变换后的D(z)也稳定;离散滤波器得过程特性及频率特性同原连续滤波器比较有一定得失真,需要较小得采样周期T。
3.双线性变换法如果D(s)稳定,则相应得D(z)也稳定;D(s)不稳定,则相应的D(z)也不稳定;所得D(z)的频率响应应在低频段与D(s)得频率响应相近,而在高频段相对于D(S)得频率响应有严重畸变。
4.脉冲响应不变法D(z)和D(s)有相同得单位脉冲响应序列;若D(z)稳定,则D(s)也稳定;D(z)存在着频率失真。
该法特别适用于频率特性为锐截止型的连续滤波器的离散化。
主要应用于连续控制器D(s)具有部分分式结构或能较容易地分解为并联结构,以及D(s)具有陡衰减特性,且为有限带宽得场合。
这时采样频率足够高,可减少频率混叠影响,从而保证D(z)得频率特性接近原连续控制器D(s)。
5.阶跃响应不变法若D(s)稳定,则相应的D(z)也稳定;D(z)和D(s)得阶跃响应序列相同;6.零极点匹配法需要先求出连续传递函数得全部零极点,计算复杂;能够保持变换前后特征频率处得增益不变;不改变系统得稳定区域,变换前后G(z)和G(s)的稳定特性不变2.多输入/多输出系统能控性和能观测性与系统传递函数矩阵的关系如何?在单输入单输出系统中,能控且能观测得充分必要条件是传递矩阵G (s )的分母与分子之间不发生因子相消。
连续系统离散化方法一、概述连续系统离散化方法是一种将连续系统转化为离散系统的方法,常用于控制系统的设计和分析。
该方法可以将一个无限维度的连续系统转化为有限维度的离散系统,使得控制器设计和分析变得更加简单和可行。
二、连续系统模型在开始进行连续系统离散化的过程中,需要先建立一个连续系统模型。
通常情况下,这个模型可以由微分方程或者差分方程来表示。
三、离散化方法1. 时域离散化方法时域离散化方法是最基本的离散化方法之一。
它通过将时间轴上的信号进行采样,从而将一个连续时间信号转换为一个离散时间信号。
这个过程中需要确定采样周期以及采样点数目等参数。
2. 频域离散化方法频域离散化方法是一种利用傅里叶变换将一个连续时间信号转换为一个频域信号,然后再对该频域信号进行采样得到一个离散时间信号的方法。
这个过程中需要确定采样频率以及采样点数目等参数。
3. 模拟器法模拟器法是一种将连续系统转化为离散系统的方法。
这个方法的核心思想是利用一个数字模拟器来模拟连续系统的行为,从而得到一个离散时间信号。
4. 差分方程法差分方程法是一种将连续系统转化为离散系统的方法。
这个方法的核心思想是利用微分方程在离散时间点上进行近似,从而得到一个差分方程。
四、误差分析在进行离散化过程中,会产生一定的误差。
因此,需要对误差进行分析和评估,以确保离散化后的结果与原始连续系统相近。
五、应用实例1. 机械控制系统机械控制系统中通常需要对连续时间信号进行采样和处理。
通过使用离散化方法,可以将连续信号转换为数字信号,并且可以在数字域上进行控制器设计和分析。
2. 电力电子控制系统电力电子控制系统中通常需要对高频信号进行处理。
通过使用频域离散化方法,可以将高频信号转换为数字信号,并且可以在数字域上进行控制器设计和分析。
六、总结连续系统离散化方法是一种将连续系统转化为离散系统的方法。
通过使用不同的离散化方法,可以将连续时间信号转换为数字信号,并且可以在数字域上进行控制器设计和分析。