开题报告模糊控制在液位控制中的仿真应用设计目6.20
- 格式:doc
- 大小:45.50 KB
- 文档页数:6
基于TWINCAT平台的液位模糊控制系统研究的开题报告一、研究背景随着现代工业自动化技术的发展,液位控制技术逐渐成为了工业生产中必不可少的技术之一。
在液位控制系统中,模糊控制技术是一种有效的控制方法,能够对液位系统的非线性和模糊性进行有效的控制。
TWINCAT是德国贝加莱公司开发的高性能工业控制软件平台,该平台具有高性能、可扩展性、稳定性和易扩展性等优点,是目前工业自动化控制领域中广泛应用的一种控制平台。
基于TWINCAT平台的液位模糊控制系统研究,能够有效解决液位控制系统的非线性和模糊性问题,提高液位控制系统的控制精度和稳定性。
二、研究内容和目标本研究旨在设计一种基于TWINCAT平台的液位模糊控制系统,通过对液位测量信号进行模糊处理,将其转化为控制信号,并采用模糊控制算法对液位进行控制。
研究内容包括以下几个方面:1. 设计液位控制系统硬件平台,包括传感器、执行器、控制器等组成部分。
2. 建立液位控制系统的数学模型,分析系统的特性和性能指标。
3. 进行液位信号的模糊处理,将其转化为控制信号。
4. 采用模糊控制算法对液位进行控制,控制系统稳定性和控制精度得到提高。
5. 对所设计的基于TWINCAT平台的液位模糊控制系统进行实验验证。
三、研究方法和步骤本研究采用以下研究方法和步骤:1. 阅读文献,了解液位控制、模糊控制和TWINCAT平台相关知识。
2. 设计液位控制系统硬件平台,包括液位传感器、执行器、控制器等组成部分。
3. 建立液位控制系统的数学模型,进行系统仿真。
4. 进行液位信号的模糊处理,将其转化为控制信号。
5. 采用模糊控制算法对液位进行控制。
6. 对所设计的液位模糊控制系统进行实验验证。
四、研究意义本研究的意义在于:1. 提高液位控制系统的控制精度和稳定性,满足工业生产对液位控制的严格要求。
2. 探索基于TWINCAT平台的液位控制技术在工业自动化领域中的应用。
3. 促进液位控制技术和模糊控制技术的进一步研究和发展。
模糊pid控制开题报告模糊PID控制开题报告一、研究背景PID控制是一种经典的控制方法,广泛应用于工业自动化领域。
然而,在某些复杂的系统中,PID控制器的参数调节和系统响应往往面临挑战。
为了解决这一问题,模糊PID控制应运而生。
模糊PID控制是将模糊逻辑与PID控制相结合,通过模糊化输入和输出,以及模糊规则的设计,实现对复杂系统的精确控制。
本文旨在探讨模糊PID控制的原理和应用。
二、研究目的本研究的目的是探究模糊PID控制的原理和应用,并通过实验验证其控制效果。
通过对比传统PID控制和模糊PID控制的性能差异,分析模糊PID控制在复杂系统中的优势和适用性。
同时,本研究还将针对模糊PID控制的参数调节进行优化,以提高控制系统的稳定性和响应速度。
三、研究内容1. 模糊PID控制的基本原理介绍模糊PID控制的基本概念和理论基础,包括模糊化、模糊规则的设计和解模糊等关键步骤。
通过数学模型和图表的形式,详细说明模糊PID控制的工作原理。
2. 模糊PID控制的应用案例选取一个具体的应用案例,如温度控制或机器人运动控制,通过实验验证模糊PID控制的效果。
比较传统PID控制和模糊PID控制在系统响应速度、稳定性和鲁棒性等方面的差异,分析模糊PID控制的优势。
3. 模糊PID控制参数调节的优化方法针对模糊PID控制中参数调节的问题,提出一种优化方法。
该方法可以通过自适应调节策略或基于遗传算法的优化算法,自动调整模糊PID控制器的参数,以提高控制系统的性能。
四、研究方法本研究将采用实验研究和理论分析相结合的方法。
首先,通过搭建实验平台,选取一个具体的应用案例,进行传统PID控制和模糊PID控制的对比实验。
然后,根据实验数据,对比两种控制方法的性能差异。
同时,通过数学模型和理论分析,探讨模糊PID控制的原理和应用。
五、研究意义模糊PID控制作为一种新兴的控制方法,具有广阔的应用前景。
通过本研究,可以深入了解模糊PID控制的原理和应用,为工业自动化领域提供更加精确和稳定的控制方案。
模糊PID操纵在液位操纵中的应用摘要液位操纵是工业操纵中的一个重要问题,针对液位操纵进程中存在大滞后、时变、非线性的特点,为适应复杂系统的操纵要求,人们研制了种类繁多的先进的智能操纵器,模糊PID操纵器即是其中之一。
模糊PID操纵结合了PID操纵算法和模糊操纵方式的优势,能够在线实现PID参数的调整,使操纵系统的响应速度快,过渡进程时刻大大缩短,超调量减少,振荡次数少,具有较强的鲁棒性和稳固性,在模糊操纵中扮演着十分重要的角色。
本文介绍了模糊PID操纵在双容水箱的液位操纵系统中的应用。
第一成立了液位操纵系统数学模型,介绍了PID操纵、模糊操纵和模糊PID的大体原理,然后利用MATLAB工具生成仿真曲线。
关键词:液位系统,液位操纵,模糊PID操纵,仿真The Application on Fuzzy PID Control for WaterLevel Control SystemAbstractWater level control is an important problem in industry control.Aimed at the characteristics of long time lag, nonlinearity and variation with time in the process of level control, a vast range of advanced intelligent controllers are designed to meet the control demand of complex systems,——among which is fuzzy PID bining the advantages of PID control algorithm and fuzzy control,fuzzy PID control could realize online adjusting of PID parameters, so as to quicken the control system response speed, reduce the overshoot, shorten the transitional period, and decrease the oscillating time.The system has strong robustness and stability,and plays a leading role in fuzzy control.This thesis introduces the application of fuzzy PID control in double-tank water level system. It first builds a mathematical model of the water level control system, illustrating the rationale of PID control, fuzzy control and fuzzy PID.Then it uses a tool of MA TLAB to have a simulating experiment of set-point tracking,disturbance rejection, and accommodating to the object's parameter variation. The results show that comparing with the normal PID algorithm, fuzzy PID control algorithm has characteristics such as strong robustness and good dynamic performance. This control method is effective to the doubletank water level system.Keywordstem: Water Level Syter ,Water level control, fuzzy PID control, simulation目录1绪论 0课题研究的背景与意义 0 0模糊操纵产生的背景与意义 (1)液位操纵系统实验装置及其操纵策略 (2)水箱液位操纵系统简介 (2)液位操纵系统操纵对象及操纵策略 (4)2液位操纵系统结构及其建模 (5)水箱系统的结构 (5)二阶对象的结构 (6)双容水箱系统的建模 (6)3操纵算法研究 (8)3.1PID操纵算法 (8)模拟PID调剂器 (8)数字PID操纵算法 (10)3.1.3 PID操纵器的特点 (12)模糊操纵算法 (13) (13) (14) (14) (18)4模糊PID算法的研究与仿真 (23)模糊PID操纵 (23) (23) (23) (24) (27) (27) (29)模糊PID在液位操纵中的仿真 (29)5总结 (31)致谢 (32)1 绪论课题研究的背景与意义随着工业生产的飞速进展,人们对操纵系统的操纵精度、响应速度、系统稳固性与适应能力的要求愈来愈高。
模糊控制在液位控制中的仿真研究的开题报告
一、选题背景和意义
随着工业化和城市化的快速发展,液位控制在工业生产和生活中的作用越来越重要。
液位控制是指通过对介质高度、压力等参数的检测,使介质在一定范围内保持稳定的高度或压力值。
传统液位控制方法采用PID控制器,其控制效果取决于系统模型的准确性和PID控制器的参数调节,难以满足复杂变化的控制需求。
因此,模糊控制作为一种基于经验的控制方法,其对模型精度和控制参数变化的适应性较强,因而越来越被人们所关注。
本文主要探讨模糊控制在液位控制中的应用,以探究新型的液位控制方式,为今后工业生产中的液位控制提供一种新的思路和方法。
二、研究内容和技术路线
本文将采用以下方法研究模糊控制在液位控制中的应用:
1.建立液位控制的数学模型,包括物理模型和控制模型。
2.设计模糊控制器,进行模拟分析。
主要包括设计模糊控制器的输入和输出,设置控制规则和隶属函数等。
3.对比分析传统PID控制方法和模糊控制方法的优缺点,评价其控制效果。
4.仿真分析不同控制参数对液位控制效果的影响。
三、预期成果和意义
本文预期能够探索出一种新型的液位控制方法,即模糊控制方法,并与传统PID 控制方法进行对比分析。
通过充分研究模糊控制在液位控制中的应用,进一步提高液位控制的控制精度和稳定性,为今后工业生产中的液位控制工作提供新的方案和实际指导意义。
模糊控制算法在水箱液位控制系统中的应用毕业论文目录摘要 (I)ABSTRACT...................................................... I I 1 绪论. (1)1.1课题研究的背景与意义 (1)1.2模糊控制产生的背景与意义 (1)1.3液位控制系统研究的意义 (2)1.4本论文研究的主要容 (3)2 液位控制系统的分析与建模 (4)2.1引言 (4)2.2液位控制系统控制对象及控制策略 (5)2.3被控对象的分析与建模 (6)2.4本章小结 (8)3 控制算法研究 (9)3.1模糊控制算法 (9)3.1.1 模糊控制的产生及发展 (9)3.1.2 模糊控制的特点 (10)3.1.3 模糊控制的基本概念 (10)3.1.4 模糊控制的基本理论 (14)3.2本章小结 (18)4 模糊控制算法在水箱液位控制中的应用 (19)4.1PID控制在双容水箱液位控制系统中的仿真研究 (19)4.1.1 PID控制算法 (19)4.1.2 PID参数对系统性能的影响 (21)4.1.3 PID参数的整定方法 (21)4.2模糊自整定PID在双容水箱液位系统中的应用 (25)4.2.1 模糊PID控制器的设计 (25)4.2.2 模糊控制部分 (25)4.3仿真结果与分析 (29)结论 (31)致谢 (32)参考文献 (33)1 绪论1.1 课题研究的背景与意义随着工业生产的飞速发展,人们对控制系统的控制精度、响应速度、系统稳定性与适应能力的要求越来越高。
而实际工业生产过程中的被控对象往往具有非线性、时延的特点,应用常规的控制手段难以达到理想的控制效果,研究对非线性、时延对象的先进控制策略,提高系统的控制水平,具有重要的实际意义。
本文所提及的液位控制系统是一种可以模拟多种对象特性的实验装置。
该装置是进行控制理论与控制工程教学、实验和研究的理想平台,可以方便的构成多阶系统对象,用户既可通过经典的PID控制器设计与调试,完成经典控制教学实验,也可通过模糊逻辑控制器的设计与调试,进行智能控制教学实验与研究。

题目基于模糊PID的液位控制系统设计1本选题的意义及国内外发展状况1.1研究目的和意义人们生活以及工业生产经常涉及到液位和流量的控制问题,例如饮料、食品加工,居民生活用水的供应,溶液过滤,污水处理,化工生产等多种行业的生产加工过程,通常要使用蓄液池。
位需要维持合适的高度,这就需要用到液位控制系统。
不仅如此,液位控制系统也是工业过程中的一种典型控制系统,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的生产效果,如蒸馏塔中液位控制的精度可直接影响产品的质量,锅炉等高压设备中液位控制的精度则于生产安全紧密相关。
由此可见,液位控制不论对人们的生活还是工业发展皆具有非常重要的意义。
液位控制系统是一种可以模拟多种对象特性的实验装置。
常规的PID控制器在非线性时变,滞后较大的系统中鲁棒性不强,控制效果不理想。
而模糊PID 控制器既具有模糊控制灵活而适应性强的优点,又具有常规PID控制精度高的特点, 在工业控制中得到广泛的应用。
本设计以单水箱液位控制系统为研究对象,结合模糊控制和PID控制方法设计液位控制器,同时针对液位控制过程中存在的滞后现象,利用Smith预估方法进行补偿以消除滞后影响。
1.2国内外发展情况PID控制器问世至今凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制的主要技术之一。
常规的PID控制器在非线性时变,滞后较大的系统中鲁棒性不强,控制效果不理想[1]。
而模糊PID控制器既具有模糊控制灵活而适应性强的优点,又具有常规PID控制精度高的特点,在工业控制中得到广泛的应用。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
毕业论文开题报告:液位系统的水位PID控制器设计大学本科毕业论文(设计)开题报告
学院:信息科学与工程学院专业课:自动化学科名称水位PID控制器液位系统设计
1、本课题的的研究目的和意义:研究目的:
1)通过毕业设计,进一步加深对电路电子学、信号监测、控制理论和过程控制系统
等课程内容的理解;
2)掌握pid调节的过程控制系统工程设计的方法;3)掌握水位过程控制系统的实验
调试方法;4)掌握matlab的仿真应用及实时控制系统;
研究意义:
过程控制是自动技术的重要应用领域,它。
在计算机技术的飞速发展和自动控制理论与设计方法的发展的推动下,国外液位控制
系统发展迅速,在智能化、自适应和参数自整定方面取得了成果。
在这方面,日本、美国、德国、瑞典等国家已经生产了一批商品化的液位控制器,性能优良的仪表被广泛应用于各
个行业。
3、本课题的主要研究内容(提纲)和成果形式:研究内容:
水位控制系统采用PID控制器。
系统水位位置控制室通过出水管和进水管之间的流量
差反映水位高度。
根据它们的不同变化,采用PID控制器对阀门进行调节和控制。
成果形式:
通过实验,得到了使系统得到稳定控制的PID参数。
4、拟解决的关键问题:实验设计是否要维修。
5.研究思路、方法和步骤:研究思路:
将pid控制器用于水位控制系统,该系统的水位位置控制室通过出水管和进水管的流
量差值的大小来反映水位高低的,根据它们的不同变化应用pid控制器对阀门进行调节控制。
模糊PID在水位控制系统中的应用为了解决造纸行业对恒定水位的控制问题,设计并应用了水位恒定控制系统中的模糊PID控制器。
详细论述了模糊PID算法的设计过程,通过实验验证了此方法的可行性。
实现了水位控制系统的PID参数的在线调整,达到了对水位的有效控制的目的。
引言水位控制系统在造纸行业得到广泛应用,如果液位控制不好,液位高了或低了,会影响纸张的质量。
本文将模糊控制和PID控制结合起来,实现PID参数的在线调整,可以有效地解决系统的非线性和不确定性,同时随时根据系统的输入与反馈的偏差及偏差率来调节水位,实现水位的恒定。
实验结果表明,这样既能防止超调又能提高响应速度,明显地改善了系统的动态和静态性能,在水的压力及负载变化的情况下也能保持水位的恒定。
1 水位控制系统本系统的控制对象如图1所示:假若液罐I和液罐Ⅱ里面均是水,由液罐I的水通过进水管的水泵将水输送到液罐Ⅱ。
水位的控制过程如下:水位变送器检测到的水位值通过PLC 送到控制器中,该值与控制器的设定值进行比较,如果检测到的值小于设定值,那么控制器将输出调节信号,经过PLC、手操器,最终将信号送至出水管的电动调节阀上,此信号将阀关小。
如果检测到的值大于设定值,那么阀将开大。
如果检测值与设定值正好相等时,这时的出水量应与水泵的进水量相等,保持动态平衡犯。
2 水位的模糊PID控制2.1模糊PID的构成常规的PID控制虽有着原理简单、使用方便等优点但却不具备在线调整参数P、I、D 的功能,使其不能满足系统在不同条件下对PID参数自调整的要求,模糊控制器是一种近年来发展起来的新型控制器,其优点是不要求掌握被控对象的精确数学模型,而根据人工规则组织决策表,且由该表决定控制量的大小。
模糊控制器代替了传统的控制器,它是模糊控制系统的核心部分。
由输入量模糊化、模糊控制规则、模糊决策等几部分组成,如图2所示。
点击图片查看大图图1 水位控制结构框图点击图片查看大图图2 模糊控制系统原理框图2.2模糊-PID控制原理模糊一PID控制器是以误差e和误差变化率ec作为输入,根据不同的偏差和偏差率对PID参数进行在线调整,以满足不同时刻对控制参数的不同要求,而使被控对象有良好的动、静态性能,如图3所示。
液位控制单元仿真实验报告大家好,今天咱们聊聊液位控制单元的仿真实验。
说实话,这玩意儿听上去有点高大上,但其实和咱们生活中的很多东西都息息相关。
想象一下,你家里的水箱,别看它默默无闻,背后可是有一套复杂的系统在运作。
液位控制就是确保水箱里的水不会满得溢出来,也不会干巴巴的。
这就像妈妈总是提醒你别喝太多水,又要确保你能喝到,哈哈,真是让人哭笑不得。
咱们得明白液位控制单元到底是个啥。
它就像一个聪明的小管家,时刻关注着液体的高度。
要是液体太多,管家就得给你发个信号,让你赶紧把水放掉;要是太少了,它又会通知水泵赶快加水。
这样一来,不管是家里的水箱,还是工厂里的大罐子,统统都能保持在一个安全、合理的水平上,真是无微不至啊。
在这次实验中,我们使用了仿真软件来模拟液位控制。
说实话,这种高科技的玩意儿真是让人惊艳。
你可以在电脑前动动鼠标,就能看到液位变化的全过程,仿佛自己成了“液位小王子”,一切都在掌握之中。
咱们把水的流入流出速率、传感器的反馈、泵的工作状态都一一设定,简直就是玩游戏,乐趣无穷。
在实验中,我们还发现了不少有趣的现象。
有时候水位变动得特别快,就像开了挂一样,瞬间让人感觉手忙脚乱。
这个时候,液位控制单元就要发挥它的“超级能力”了。
它像个老练的指挥家,迅速调整各个设备的工作状态,确保系统不会失控。
真的是一场精彩的“演出”,一切都在它的掌控之中。
这玩意儿并不是万能的。
遇到突发情况,比如水管破裂,或者电力故障,液位控制单元也有点无奈。
就像咱们生活中总会有些意外,不能事事都照顾到。
这时候,咱们就得考虑备份系统,做好应急预案。
听上去繁琐,但想想吧,这就像人生中的“备胎”,总得有个后招,才能应对突发的风波。
实验中,我们还尝试了不同的液体,比如水、油,甚至是一些化学药品。
每种液体的流动特性都不一样,控制起来就像调皮的小孩,有时候听话,有时候偏要闹腾。
尤其是油,它的粘稠度可不是开玩笑的。
咱们得小心翼翼,不然可就玩完了。
液位控制系统设计开题报告液位控制系统设计开题报告一、引言液位控制系统是工业自动化领域中的重要组成部分,广泛应用于石油化工、水处理、食品加工等领域。
本文将探讨液位控制系统的设计与开发,旨在提高液位控制的精确度和稳定性,以满足工业生产的需求。
二、背景分析液位控制系统的设计是为了实现对液体容器内液位的精确控制。
传统的液位控制系统通常采用浮子式液位传感器,但其存在精度低、易受干扰等问题。
因此,本文将研究并设计一种新型的液位控制系统,以提高液位控制的精确度和稳定性。
三、设计目标本文的设计目标是开发一种基于电容传感技术的液位控制系统,实现对液体容器内液位的精确测量和控制。
具体目标如下:1. 提高液位控制的精确度,使其误差小于0.1%;2. 提高液位控制的稳定性,减小受环境干扰的影响;3. 实现对液位的实时监测和报警功能。
四、设计方案本文的设计方案主要包括以下几个方面:1. 传感器选择:选择一种适用于液位控制的电容传感器,通过测量电容值来获取液位信息。
2. 信号处理:设计合适的信号处理电路,对传感器采集到的电容值进行放大、滤波和数字化处理。
3. 控制算法:采用PID控制算法对液位进行控制,通过调节控制信号来实现液位的精确控制。
4. 系统集成:将传感器、信号处理电路和控制算法进行集成,实现一个完整的液位控制系统。
五、预期效果通过本文的设计和研究,我们预期能够达到以下效果:1. 提高液位控制的精确度,使其误差小于0.1%,满足工业生产的需求。
2. 提高液位控制的稳定性,减小受环境干扰的影响,保证系统的可靠性。
3. 实现对液位的实时监测和报警功能,及时发现异常情况并采取相应措施。
六、研究方法本文将采用实验研究的方法,具体步骤如下:1. 选择适用于液位控制的电容传感器,并进行性能测试和比较。
2. 设计并搭建信号处理电路,对传感器采集到的电容值进行放大、滤波和数字化处理。
3. 设计并实现基于PID控制算法的液位控制系统,进行系统集成和测试。
基于模糊PID控制的结晶器液位控制系统研究的开题报告一、研究背景结晶器液位控制是化工工艺生产过程中的重要环节,控制好结晶器液位,可以有效地保证产品品质和生产效率。
传统的结晶器液位控制系统多使用PID控制算法,但是在实际应用中,PID控制算法存在以下问题:1)参数调节难度大,需要经验丰富的工程师参与;2)对于非线性系统和参数随时间变化的系统,PID控制效果不佳。
因此,需要采用更高级的控制算法来解决这些问题。
模糊控制是一种基于人类经验和直观思维方式的控制方法,可以应用于很多复杂的非线性系统。
模糊PID控制将模糊逻辑和PID控制相结合,可以降低参数调节的难度,并提高控制效果。
因此,将模糊PID控制应用于结晶器液位控制系统具有一定的研究意义。
二、研究内容及目标1. 分析结晶器液位控制系统的特点及问题,并介绍PID控制算法和模糊控制算法的基本原理;2. 通过建立数学模型,比较传统PID控制算法和模糊PID控制算法在结晶器液位控制上的优缺点;3. 根据实验数据分析模糊PID控制算法的参数调节方法和控制精度,并与传统PID控制算法进行对比验证;4. 最终设计并实现基于模糊PID控制的结晶器液位控制系统,并进行实验验证。
三、研究方法及步骤1. 通过文献研究,了解结晶器液位控制系统的特点及问题,并熟悉PID控制算法和模糊控制算法的基本原理;2. 建立结晶器液位控制系统的数学模型,并使用Simulink进行仿真分析;3. 分析模糊PID控制算法的参数设定方法,并根据实验数据进行参数调节和控制效果分析;4. 设计并实现基于模糊PID控制的结晶器液位控制系统,并进行实验验证,对实验结果进行对比和分析。
四、可能的创新点和意义1. 对比传统PID控制和模糊PID控制算法在结晶器液位控制上的优缺点,验证模糊PID控制算法的优越性;2. 分析模糊PID控制算法的参数调节方法和控制精度,并与传统PID控制算法进行对比验证,为结晶器液位控制系统提供更优秀的控制方案;3. 实现基于模糊PID控制的结晶器液位控制系统,并进行实验验证,为类似系统的研究提供一定借鉴价值。
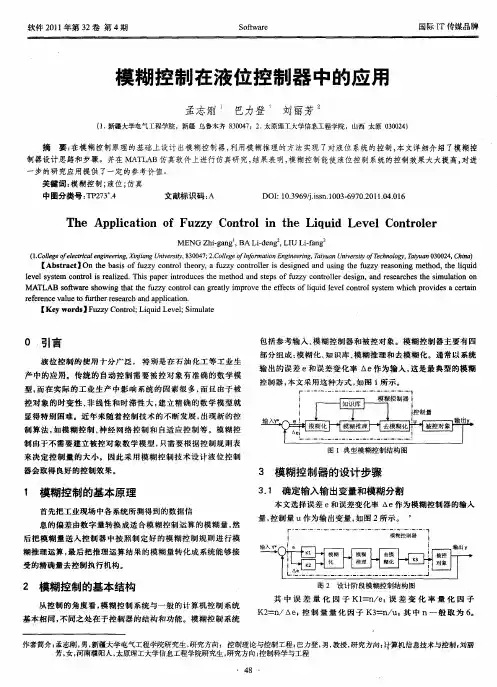
模糊控制算法在液位控制系统的应用研究尹振红;李强;杨志福【摘要】本次设计将以控制系统的MATLAB仿真为前提,研究模糊PID控制效果,并基于过程控制实验系统的双容水箱液位系统,对模糊PID算法进行应用研究。
【期刊名称】《科技风》【年(卷),期】2011(000)021【总页数】2页(P67-67,69)【关键词】Matlab;模糊PID算法【作者】尹振红;李强;杨志福【作者单位】吉林工程技术师范学院,吉林长春130052;吉林石化建修公司,吉林吉林132000;吉林省电子信息技师学院,吉林长春130052【正文语种】中文【中图分类】TP273液位是工业过程控制的一个重要参数,水箱液位对象是具有大惯性,大滞后动态特性的系统,在工业生产过程中,广泛存在于石油化工过程中的蒸馏塔、化学反应器、液体传输设备及热工过程中的锅炉、热交换器等对象中。
PID控制是最早发展起来的控制策略之一,由于其算法简单和可靠性高,被广泛应用于工业过程控制,但是需要精确的数学模型,而且对于大滞后动态特性的系统控制效果不是很好。
所以本文将模糊控制和PID控制两者结合起来对液位进行控制,扬长避短,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点。
这种Fuzzy-PID复合型控制器是对非线性、时延对象的先进控制策略,能提高系统的控制水平,具有重要的实际意义,在此,作者利用美国MathWorks公司开发的Matlab软件进行仿真。
针对上述的双容水箱结构,根据物料平衡关系可以列出下列方程:其中Q1、Q2、Q3为流过阀1、阀2、阀3的流量;h1、h2为上水箱、下水箱的液位高度;C1、C2为上、下水箱的液容系数;R2、R3为阀2、阀3的液阻。
其被控量是第二只水箱的液位h2,输入量为Q1。
双容水箱的传递函数为:式中T1为上水箱过程时间常数,T1=R2C1;T2为下水箱过程时间常数,T2=R3C2。
另外,若上、下水箱之间的管道过长存在时延,则此时传递函数多一个滞后环节,为选取双容水箱为被控对象,经实验,确定双容水箱的传递函数为:2 自适应模糊PID控制器的设计以常规PID控制为基础,采用模糊推理理论,将被控制量的偏差e和偏差变化率ec作为二维模糊控制器的输入变量,通过模糊控制器的输出变量,利用模糊控制规则在线调整PID各参数,便构成了自适应模糊PID控制系统。
液位控制系统开题报告液位控制系统开题报告一、引言液位控制系统是一种广泛应用于工业生产和实验室实践中的自动化控制系统。
它通过监测和调节液体的液位,确保液体在设定的范围内保持稳定。
液位控制系统在许多领域中都起着重要作用,如化工工艺、石油炼制、食品加工等。
本文将探讨液位控制系统的原理、应用以及未来的发展方向。
二、液位控制系统原理液位控制系统的核心原理是通过传感器监测液体的液位,并将信号传递给控制器,控制器再根据设定的目标值来调节执行机构,使液位保持在设定的范围内。
传感器是液位控制系统中的关键组件,常用的传感器包括浮子式液位传感器、电容式液位传感器和超声波液位传感器等。
这些传感器能够准确地测量液体的液位,并将信号转换为电信号输出。
三、液位控制系统的应用液位控制系统在许多领域中都有广泛的应用。
在化工工艺中,液位控制系统能够确保反应器中的液位稳定,从而保证反应的效果和安全性。
在石油炼制过程中,液位控制系统可以监测油罐的液位,避免溢出和漏油等安全事故。
在食品加工行业中,液位控制系统能够控制液体的流量和混合比例,提高生产效率和产品质量。
四、液位控制系统的挑战和解决方案液位控制系统在实际应用中面临一些挑战。
首先,不同液体的特性和环境条件会对液位控制系统的准确性和稳定性产生影响。
其次,传感器的选择和校准也是一个关键问题。
为了解决这些挑战,研究人员正在不断努力改进传感器的性能,并开发新的控制算法和技术。
例如,利用先进的信号处理和模型预测控制技术,可以提高液位控制系统的响应速度和准确性。
五、未来的发展方向随着科技的不断进步,液位控制系统将会迎来更多的发展机遇。
首先,人工智能和机器学习的应用将使液位控制系统更加智能化和自适应。
其次,新材料和传感器技术的发展将提高液位控制系统的稳定性和耐用性。
此外,无线通信和互联网技术的发展也将使液位控制系统更加便捷和易于管理。
六、结论液位控制系统是一种重要的自动化控制系统,广泛应用于工业生产和实验室实践中。
基于LC的模糊控制算法在液位控制中的应用【摘要】针对双容水箱液位控制,设计了一个模糊控制器并采用SLC-500 PLC实现算法,在实验中与传统PID控制算法做比较,通过分析两者的实时控制曲线图得出,模糊控制算法具有更好的控制效果。
【关键词】液位控制;模糊控制;PID控制1.引言PLC(可编程序控制器)由于其抗干扰能力强,可靠性高、通用性强、编程简单、功能强大、维护方便等特点,因此在许多行业的工业控制中得到广泛的应用。
现代PLC的应用范围不局限于开关量的顺序控制,由于其功能指令越来越强大,可以实现很多复杂的控制算法,结合其硬件模块如模拟量输入、输出模块,在复杂的过程控制、运动控制中应用越来越广泛。
而模糊控制器,由于它不需要知道对象的数学模型,具有系统响应快、超调量小、过渡时间短和鲁棒性好等优点,在复杂的、非线性的工业控制系统中得到广泛的应用。
若将PLC和模糊控制技术相结合应用于复杂工业控制中,可以取得意想不到的良好效果。
本文采用美国罗克韦尔公司SLC-500 PLC实现模糊控制算法,并在水箱液位过程控制实验系统中成功应用,取得良好效果,其应用性可以推广到工业控制中,具有较高的参考价值。
2.水箱液位控制实验系统简介A3000型过程控制实验装置是基于工业过程的物理模拟对象,它是集自动化仪表技术,计算机技术,通讯技术,自动控制技术为一体的多功能实验装置。
系统包括流量、温度、液位、压力等热工参数,可实现系统参数辨识、单回路控制、串级控制、前馈控制、比值控制等多种控制形式。
在液位控制系统控制中,用到的是此装置的液位控制装置。
现介绍液位系统及其相关装置。
2.1 液位控制系统组成三容水箱实验装置由水箱主体、差压变送器、电动调节阀、变频器、电磁阀、流量计、水泵、SLC PLC和计算机等组成,系统结构如图1所示。
2.2 双容水箱液位控制本研究的被控对象为双水箱的下水箱液位。
所用设备为中水箱、下水箱、水泵、液位变送器、变频器、SLC500 PLC和监控计算机。
东北石油大学华瑞学院毕业设计(论文)任务书题目模糊液位控制器的设计与仿真专业自动化学号姓名主要内容、基本要求、主要参考资料等:主要内容:1、研究模糊控制理论和PID基本理论,并把两者进行结合,得到模糊自整定PID 控制器,并将其以用于洗衣机的模糊液位水位控制中。
2、应用MATLAB仿真软件对洗衣机的液位、进水量、出水量等进行了细致的仿真,得出一系列关于采用模糊液位控制器的全自动洗衣机的仿真数据与图文。
基本要求:1、充分调研,充分利用网络资源查阅文献。
2、完成方案设计。
3、完成功能设计。
4、完成软件系统设计。
5、完成硬件系统设计。
6、按学校有关毕业设计规范完成毕业论文工作。
主要参考资料:1、闻新,周露,李东江.MATLAB模糊逻辑工具箱的分析与应用[M].北京科学出版社,2002:141—207.2、易继锴,侯媛彬.智能控制技术[M].北京工业大学出版社,2003.4.3、诸静.模糊控制原理与应用[M].北京:机械工业出版社,2002.4、YKang,JD Lavers.Transient analysis of electric power system refomulation andtheoretical basis[J].JEEE Tram on Power Systems.2003,11(2):754~760.5、J Mahseredjian,F Alvarado.Creating an electromagnetic transients program inMATLAB[J].IEEE Tram on Power Delivery.2004(12):380~388.完成期限:指导教师签章:专业负责人签章:年月日。
吉林化工学院信息与控制工程学院
毕业设计开题报告
模糊控制在液位控制中的仿真应用设计Simulation Design Based on Fuzzy Controller in Liquid Level Control
学生学号:09510441
学生姓名:霍可栋
专业班级:自动0904
指导教师:吕春兰
职称:副教授
起止日期:2013.03.11~2013.03.24
吉林化工学院
Jilin Institute of Chemical Technology
1. 本报告前6项内容由承担毕业论文(设计)课题任务的学生独立撰写;
2. 本报告必须在第八学期开学三周内交指导教师审阅并提出修改意见;
3. 学生须在小组内进行报告,并讨论;
4. 本报告作为指导教师、专业系或毕业论文(设计)指导小组审查学生能否承担该毕业设计(论文) 课题和是否按时完成进度的检查依据,并接受学校和教学院的抽查。