3-3模糊控制器设计
- 格式:ppt
- 大小:9.67 MB
- 文档页数:61
3-1 模糊逻辑控制器由哪几部分组成各完成什么功能答:模糊控制系统的主要部件是模糊化过程、知识库(数据库和规则库)、推理决策和精确化计算。
1、模糊化过程 模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序数。
2、知识库 知识库包括数据库和规则库。
1)、数据库 数据库提供必要的定义,包含了语言控制规则论域的离散化、量化和正规化以及输入空间的分区、隶属度函数的定义等。
2)、规则库 规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合。
它包括:过程状态输入变量和控制输出变量的选择,模糊控制系统的建立。
3、推理决策逻辑 推理决策逻辑是利用知识库的信息模拟人类的推理决策过程,给出适合的控制量。
(它是模糊控制的核心)。
4、精确化过程 在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程。
{模糊控制器采用数字计算机。
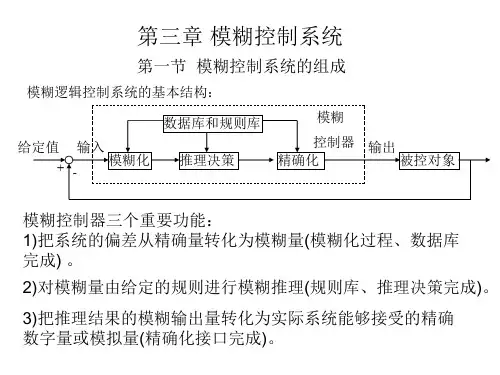
它具有三个重要功能:1) 把系统的偏差从数字量转化为模糊量(模糊化过程、数据库两块); 2) 对模糊量由给定的规则进行模糊推理(规则库、推理决策完成); 3)把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化接口)。
3-2 模糊逻辑控制器常规设计的步骤怎样应该注意哪些问题 答:常规设计方法设计步骤如下:1、 确定模糊控制器的输入、输出变量2、 确定各输入、输出变量的变化范围、量化等级和量化因子3、 在各输入和输出语言变量的量化域内定义模糊子集。
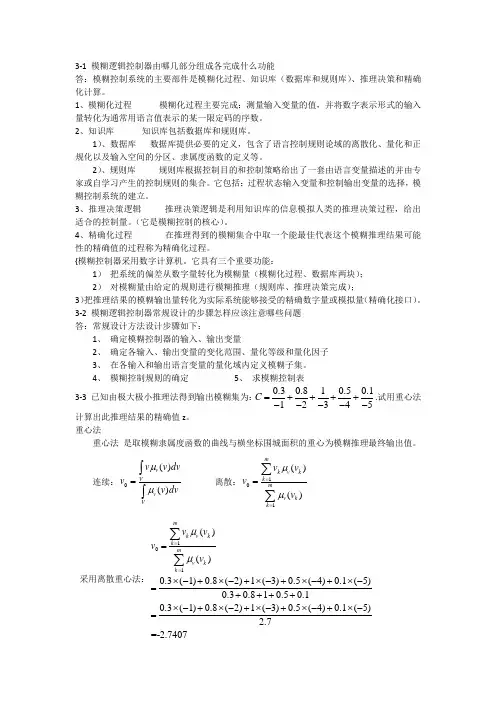
4、 模糊控制规则的确定5、 求模糊控制表 3-3 已知由极大极小推理法得到输出模糊集为:0.30.810.50.112345C =++++-----.试用重心法计算出此推理结果的精确值z 。
重心法重心法 是取模糊隶属度函数的曲线与横坐标围城面积的重心为模糊推理最终输出值。
连续:0()()v VvVv v dvv v dvμμ=⎰⎰ 离散:101()()mkvkk mvkk v v v v μμ===∑∑采用离散重心法:101()()0.3(1)0.8(2)1(3)0.5(4)0.1(5)0.30.810.50.10.3(1)0.8(2)1(3)0.5(4)0.1(5)2.7=-2.7407mkvkk mvkk v v v v μμ===⨯-+⨯-+⨯-+⨯-+⨯-=++++⨯-+⨯-+⨯-+⨯-+⨯-=∑∑3-5 设在论域(){42024}e =--误差,,,,和控制电压{024,6,8}u =,,上定义的模糊子集的隶属度函数分别如图3-21、图3-22所示。


目录摘要 (1)1 模糊控制简介 (1)1.1 模糊控制方法的研究现状 (2)1.2 模糊控制的特点 (2)1.3模糊控制的研究对象 (3)1.4模糊控制的展望 (3)2 模糊控制器的结构与工作原理 (4)2.1基本结构与组成 (4)2.2一般模糊控制器各主要环节的功能 (4)2.3隶属函数的确定原则和基本确定方法 (5)2.4模糊条件语句与模糊控制规则 (6)2.5模糊量的判决方法 (6)2.6模糊控制规则的设计和模糊化方法 (8)2.7解模糊化 (8)3 模糊控制器的设计 (9)4 关于模糊(及智能)控制理论与技术发展的思考 (11)参考文献 (12)摘要摘要:本文主要介绍了模糊控制系统的研究现状、特点,以及模糊控制器的结构与工作原理。
同时对模糊控制器的设计进行了介绍和分析,对于其基本步骤和过程进行陈述,最后就模糊(及智能)控制理论与技术发展进行总结性的思考。
关键词:模糊控制;模糊控制器;模糊量;模糊化方法引言模糊控制是近代控制理论中的一种基于语言规则与模糊推理的高级控制策略和新颖技术,它是智能控制的一个重要分支,发展迅速,应用广泛,实效显著,引人关注[13]。
随着科学技术的进步,现代工业过程日趋复杂,过程的严重非线性、不确定性、多变量、时滞、未建模动态和有界干扰,使得控制对象的精确数学模型难以建立,单一应用传统的控制理论和方法难以满足复杂控制系统的设计要求。
而模糊控制则无需知道被控对象的精确数学模型,且模糊算法能够有效地利用专家所提供的模糊信息知识,处理那些定义不完善或难以精确建模的复杂过程。
因此,模糊控制成为了近年来国内外控制界关注的热点研究领域。
1 模糊控制简介模糊控制是一种以模糊集合论、模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。
显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。
本章着重介绍模糊控制的基本思想、模糊控制的基本原理、模糊控制器的基本设计方法和模糊控制系统的性能分析。
模糊控制器设计步骤
嘿,咱来说说模糊控制器设计步骤这事儿哈!你知道不,这就像是搭积木,一块一块地来,最后搭出个漂亮的城堡。
先呢,你得明确你要控制啥,就像你得知道要搭个什么样的城堡,是高高的尖塔还是矮矮的方堡。
这就是确定被控对象和控制目标呀,可不能含糊!
然后呢,你得选好输入输出变量,这就好比给城堡选好门窗和装饰。
这些变量可得选得合适,不然城堡可就不伦不类啦。
接下来就是关键的一步啦,建立模糊规则库!这就好像是给城堡制定搭建规则,这里放块红积木,那里放块蓝积木。
这些规则得好好琢磨,可不能乱来。
再然后呀,就是确定模糊化和去模糊化方法啦。
这就像是给积木的形状做处理,让它们能更好地组合在一起,最后搭出好看的形状。
之后呢,设计模糊推理算法。
哎呀呀,这就如同让城堡的各个部分能巧妙地连接起来,形成一个整体。
再接下来,进行仿真和调试。
这不就跟搭城堡的时候不断调整积木的位置,看看哪里不合适赶紧改一样嘛。
等这一套下来,你的模糊控制器就差不多成型啦!就像城堡终于搭建完成,展现在眼前。
你想想看,要是这些步骤没做好,那模糊控制器不就跟歪歪扭扭的城堡一样,没法用啦!所以啊,每个步骤都得认真对待,就像对待自己心爱的宝贝一样。
咱可不能马马虎虎,不然最后哭都没地方哭去。
总之呢,模糊控制器设计步骤虽然听起来有点复杂,但只要一步一步来,就一定能做好。
就像搭积木,只要有耐心,就能搭出漂亮的城堡。
加油吧,朋友们!让我们一起把模糊控制器设计得棒棒的!。
模糊控制器的设计步骤模糊控制器是一种针对非线性、模糊、不确定性系统的控制方法,在控制领域有着广泛的应用。
设计一个模糊控制器需要遵循以下步骤:1. 确定控制系统的输入和输出在设计模糊控制器之前,首先需要明确控制系统的输入和输出是什么。
输入可以是系统的状态或者外部的信号,输出可以是系统的输出或者控制器的输出。
2. 确定输入和输出的量化范围输入和输出的范围需要进行量化,以便在模糊控制器中进行处理。
量化范围通常是以数字的形式表示,例如温度范围从0到100度。
3. 确定模糊变量模糊变量是指控制系统中模糊化的变量,例如温度可以被表示为模糊变量“冷”、“温暖”和“热”。
模糊变量的数量和它们之间的关系需要根据实际情况进行确定。
4. 确定模糊规则模糊规则是指模糊变量之间的关系,例如如果温度为“冷”则需要增加加热器的功率。
模糊规则可以通过专家系统或者试验数据来确定。
5. 设计模糊推理机制模糊推理机制是指根据模糊规则,将输入模糊变量转化为输出模糊变量的过程。
模糊推理机制可以是模糊关系、模糊逻辑或者模糊神经网络等。
6. 设计输出反模糊化输出反模糊化是指将模糊变量转化为具体的控制信号的过程,例如将“冷”、“温暖”和“热”转化为具体的温度控制信号。
输出反模糊化可以使用加权平均法、最大值法或者中心平均法等。
7. 设计模糊控制器模糊控制器是指将模糊规则、模糊推理机制和输出反模糊化组合在一起的系统。
模糊控制器可以使用模糊PID控制器、模糊自适应控制器或者模糊神经网络控制器等。
8. 仿真和调试在实际运用中,需要对模糊控制器进行仿真和调试,以验证控制效果和精度。
可以使用MATLAB等软件进行模拟和调试,优化控制器的各个参数和规则。
设计一个模糊控制器需要经过多个步骤,从控制系统的输入和输出、模糊变量、模糊规则、模糊推理机制、输出反模糊化到最终的控制器设计和仿真调试,需要综合考虑多个因素和参数,才能得到最优的控制效果。
模糊控制器的设计步骤一、引言模糊控制器是一种基于模糊逻辑的控制方法,它能够应对非线性、时变系统的控制问题,具有广泛的应用前景。
本文将介绍模糊控制器的设计步骤。
二、模糊控制器的基本原理模糊控制器是一种基于人类直觉和经验的控制方法,其基本原理是将输入量和输出量都用隶属度函数来描述,并通过模糊推理来实现对系统的控制。
其中,输入量和输出量都需要进行隶属度函数的建立,以便进行后续的推理。
三、模糊控制器设计步骤1. 确定输入与输出变量首先需要确定要进行控制的系统中所涉及到的输入与输出变量。
例如,在温度控制系统中,输入变量可以是环境温度和设定温度,输出变量可以是加热功率。
2. 建立隶属度函数建立输入与输出变量对应的隶属度函数。
通常情况下,一个变量会有多个隶属度函数来描述其不同程度上的归属关系。
例如,在温度控制系统中,环境温度可以被划分为“冷”、“凉”、“温”、“热”和“炎热”五个隶属度函数。
3. 确定规则库规则库是模糊控制器的核心,它将输入变量的隶属度函数与输出变量的隶属度函数联系起来,形成一系列的规则。
例如,在温度控制系统中,如果环境温度为“冷”,设定温度为“温”,那么加热功率可以被设定为“高”。
4. 进行模糊推理根据输入变量和规则库进行模糊推理,得到输出变量的隶属度函数。
通常情况下,采用最大值合成法来进行推理。
5. 做出控制决策将输出变量的隶属度函数转化为具体的控制信号。
例如,在温度控制系统中,将加热功率的隶属度函数转化为具体的电压或电流信号。
四、模糊控制器设计实例以小车自动驾驶系统为例,介绍模糊控制器设计步骤。
1. 确定输入与输出变量输入变量:小车与目标点之间的距离、小车与目标点之间的角度。
输出变量:小车转向角度、小车速度。
2. 建立隶属度函数距离隶属度函数:近、中、远。
角度隶属度函数:左、直、右。
转向角度隶属度函数:大左、小左、直行、小右、大右。
速度隶属度函数:快、中等、慢。
3. 确定规则库共设定15条规则,例如:如果距离为“近”且角度为“左”,那么转向角度为“大左”且速度为“慢”。
模糊PID控制器的设计与仿真——设计步骤1.确定控制目标和系统模型:首先确定需要控制的目标,并建立系统模型。
系统模型可以是实际系统的数学模型,也可以是通过实验和观测得到的经验模型。
2.设计模糊控制器的输入和输出变量:根据系统模型和控制目标,确定模糊控制器的输入和输出变量。
输入变量通常是系统误差和误差变化率,输出变量是控制信号。
3.设计模糊控制器的模糊集合:为每个输入和输出变量定义模糊集合。
模糊集合可以是三角形、梯形或高斯分布等形状,根据实际情况选择最合适的形状。
4.设计模糊控制器的规则库:根据经验和专业知识,设计模糊控制器的规则库。
规则库是一组条件-结论对,规定了在不同情况下如何调整输出变量。
5. 进行仿真实验:使用仿真软件(如MATLAB/Simulink)或自己编写的代码,将设计好的模糊PID控制器与系统模型进行结合,进行仿真实验。
6.优化和调整模糊控制器参数:根据仿真实验的结果,通过优化和调整模糊PID控制器的参数,使系统的性能达到预期要求。
可以使用试验-分析-调整的方法,不断迭代优化直到满意为止。
7.实际系统应用:在仿真实验中验证通过后,将优化调整好的模糊PID控制器应用到实际系统中,进行实际控制。
过程中需要注意安全性和稳定性,随时进行监控和调整。
总结:模糊PID控制器的设计和仿真步骤包括确定控制目标和系统模型,设计模糊控制器的输入和输出变量,设计模糊控制器的模糊集合,设计模糊控制器的规则库,进行仿真实验,优化和调整模糊控制器参数,最后将优化的模糊PID控制器应用到实际系统中。
在整个过程中,需要根据实际情况不断尝试和调整,使模糊PID控制器能够更好地适应它所控制的系统。
模糊控制器设计模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制。
从线性控制与非线性控制的角度分类,模糊控制是一种非线性控制。
从控制器的智能性看,模糊控制属于智能控制的范畴,而且它已成为目前实现智能控制的一种重要而又有效的形式。
1模糊控制的基本思想在自动控制技术产生之前,人们在生产过程中只能采用手动控制方式。
手动控制过程首先是通过观测被控对象的输出,其次是根据观测结果做出决策,然后手动调整输入量,操作工人就是这样不断地完成从观测、决策到调整,实现对生产过程的手动调整输入量,操作工人就是这样不断地完成从观测、决策到调整,实现对生产过程的手动控制。
这三个步骤分别是由人的眼-脑-手来完成的。
后来,由于科学技术的进步,人们逐渐采用各种测量装置(如传感器)代替人眼,完成对被控制量的观测任务;利用各种控制器(如PID调节器)取代人脑的作用,实现比较、综合被控制量与给定量之间的偏差,控制器所给出的输出信号相当于手动控制过程中人脑的决策;使用各种执行机构(如电动机)对被控对象施加某种控制作用,这就起到了手动控制中手的调整作用。
上述由测量装置、控制器、被控对象及执行机构组成的自动测控系统,就是人们所熟知的常规负反馈控制系统。
常规控制首先要建立精确数学模型,但是对一些复杂的工业过程,建立精确的数学模型是非常困难的,或者是根本不可能的。
于是常规控制技术在这里就遇到了不可逾越的障碍。
但是,熟练的技术操作人员,通过感官系统进行现场观察,再根据自己的经验就能很容易地实现这类控制过程,于是就产生了一个问题,能否把人的操作经验总结为若干条控制规则,并设计一个装置去执行这些规则,从而对系统进行有效的控制呢?答案是肯定的。
这种装置就是模糊控制器。
与传统的PID控制相比,模糊控制有其明显的优越性。
由于模糊控制实质上是用计算机去执行操作人员的控制策略,因而可以避开复杂的数学模型。
对于非线性,大滞后及带有随机干扰的复杂工业对象,由于数学模型难以建立,因而传统的PID 控制也就失效,而对这样的系统,设计一个模糊控制器,却没有多大困难。
4模糊控制器的设计4 Design of Fuzzy Controllor4.1概述(Introduction)随着PLC在自动控制领域内的广泛应用及被控对象的日趋复杂化,PLC控制软件的开发单纯依靠工程人员的经验显然是行不通的,而必须要有科学、有效的软件开发方法作为指导。
因此,结合PLC可编程逻辑控制器的特点,应用最新控制理论、技术和方法,是进一步提高PLC软件开发效率及质量的重要途径。
系统设计的目标之一就是要提高装车的均匀性,车厢中煤位的高度变化直接影响装车的均匀性,装车不均匀对车轴有很大的隐患。
要保持高度值不变就必须不断的调整溜槽的角度,但是,在装车过程中,煤位的高度和溜槽角度之间无法建立精确的数学模型。
模糊控制它最大的特点是[43-45]:不需建立控制对象精确数学模型,只需要将操作人员的经验总结描述成计算机语言即可,因此采用模糊控制思想实现均匀装车是行之有效的方法。
虽然很多PLC生产厂家推出FZ模糊推理模块,但这些专用模块价格昂贵,需使用专门的编程设备,成本高通用性差,所以自主开发基于模糊控制理论的PLC控制器有很大的工程价值。
本章首先介绍了模糊控制的基本原理、模糊控制系统及模糊控制器的设计步骤;然后在对煤位高度控制系统分析的基础上,设计基于模糊理论的PLC控制,分别从查询表计算生成和PLC程序查询两个部分进行设计。
4.2模糊控制原理(Fuzzy Control Principle)4.2.1模糊控制理论(Fuzzy Control Theory)模糊控制理论是由美国加利福尼亚大学的自动控制理论专家L.A.Zadch教授首次提出,由英国的Mamdani首次用于工业控制的一种智能控制技术[46]。
模糊控制(FUZZY)技术是一种由数学模型、计算机、人工智能、知识工程等多门科学领域相互渗透、理论性很强的科学技术。
模糊控制是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一中计算机智能控制[47-48]。