第四章 模糊控制器的设计
- 格式:ppt
- 大小:1.09 MB
- 文档页数:70
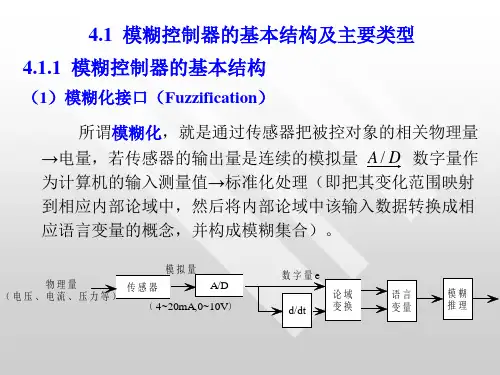
模糊控制器的设计步骤引言在控制理论中,模糊控制是一种根据模糊逻辑进行决策和控制的方法。
模糊控制器的设计步骤非常重要,本文将详细探讨模糊控制器设计的各个步骤。
一、确定控制目标控制系统的第一步是明确控制目标。
确定控制目标包括明确系统的输入和输出变量,以及期望的控制效果。
控制目标的明确定义对于后续的模糊控制器设计至关重要。
二、建立模糊化输入输出变量在模糊控制器设计中,需要将实际的输入输出变量进行模糊化。
模糊化是指将实际物理变量的取值映射到一系列模糊集合中。
模糊化过程需要确定模糊集合的数量和形状。
可以使用三角型、梯型等形状表示模糊集合。
2.1 模糊化输入变量模糊化输入变量需要确定输入变量的模糊集合和隶属度函数。
通过隶属度函数,可以将实际输入变量的取值映射到各个模糊集合中。
通常使用高斯函数、三角函数等形式的隶属度函数。
2.2 模糊化输出变量模糊化输出变量的过程类似于模糊化输入变量。
需要确定输出变量的模糊集合和隶属度函数。
同样地,可以使用各种形式的隶属度函数来描述输出变量的模糊集合。
三、制定模糊规则模糊规则是模糊控制器的核心部分,用于将模糊输入变量映射到模糊输出变量上。
模糊规则的制定需要基于专家经验或者系统的训练数据。
通常使用“如果-那么”形式的规则来描述模糊控制器的行为。
3.1 规则库的建立规则库是所有模糊规则的集合。
规则库的建立过程需要根据具体的系统特点和控制要求进行设计。
规则库中的每一条规则都包含一组条件和一个结论。
3.2 规则的模糊化在制定模糊规则时,需要对规则中的条件和结论进行模糊化处理。
模糊化处理的目的是将实际的输入值映射到相应的模糊集合上。
3.3 规则的归结在进行模糊控制运算时,需要将模糊输入和模糊规则进行匹配,并计算出相应的输出结果。
规则的归结是指将输入值和规则进行匹配,并计算出匹配程度。
3.4 规则的去模糊化规则的去模糊化是指将模糊输出结果转换为实际的物理输出值。
去模糊化需要考虑到模糊输出的不确定性和误差。
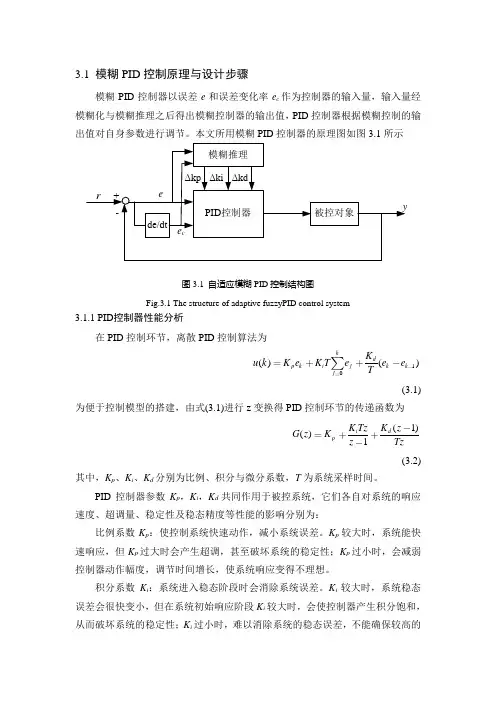
3.1 模糊PID 控制原理与设计步骤模糊PID 控制器以误差e 和误差变化率e c 作为控制器的输入量,输入量经模糊化与模糊推理之后得出模糊控制器的输出值,PID 控制器根据模糊控制的输出值对自身参数进行调节。
本文所用模糊PID 控制器的原理图如图3.1所示图3.1 自适应模糊PID 控制结构图Fig.3.1 The structure of adaptive fuzzyPID control system3.1.1 PID 控制器性能分析在PID 控制环节,离散PID 控制算法为10()()kdp k i jk k j K u k K e K Te e e T(3.1)为便于控制模型的搭建,由式(3.1)进行z 变换得PID 控制环节的传递函数为(1)()1i d pK Tz K z G z K z Tz(3.2)其中,K p 、K i 、K d 分别为比例、积分与微分系数,T 为系统采样时间。
PID 控制器参数K p ,K i ,K d 共同作用于被控系统,它们各自对系统的响应速度、超调量、稳定性及稳态精度等性能的影响分别为:比例系数K p :使控制系统快速动作,减小系统误差。
K p 较大时,系统能快速响应,但K p 过大时会产生超调,甚至破坏系统的稳定性;K p 过小时,会减弱控制器动作幅度,调节时间增长,使系统响应变得不理想。
积分系数K i :系统进入稳态阶段时会消除系统误差。
K i 较大时,系统稳态误差会很快变小,但在系统初始响应阶段K i 较大时,会使控制器产生积分饱和,从而破坏系统的稳定性;K i 过小时,难以消除系统的稳态误差,不能确保较高的调节精度。
微分系数K d:提高系统的动态响应性能,会在系统响应过程中对偏差的变化进行提前预测,从而抑制偏差的变化。
K d过大时,会使系统响应作用减弱,从而使调节时间增长,而且会降低系统的抗干扰性能。
PID控制参数的调节必须考虑不同时刻它们各自对系统性能的影响及相互之间的互联关系。
4模糊控制器的设计4 Design of Fuzzy Controllor4.1概述(Introduction)随着PLC在自动控制领域内的广泛应用及被控对象的日趋复杂化,PLC控制软件的开发单纯依靠工程人员的经验显然是行不通的,而必须要有科学、有效的软件开发方法作为指导。
因此,结合PLC可编程逻辑控制器的特点,应用最新控制理论、技术和方法,是进一步提高PLC软件开发效率及质量的重要途径。
系统设计的目标之一就是要提高装车的均匀性,车厢中煤位的高度变化直接影响装车的均匀性,装车不均匀对车轴有很大的隐患。
要保持高度值不变就必须不断的调整溜槽的角度,但是,在装车过程中,煤位的高度和溜槽角度之间无法建立精确的数学模型。
模糊控制它最大的特点是[43-45]:不需建立控制对象精确数学模型,只需要将操作人员的经验总结描述成计算机语言即可,因此采用模糊控制思想实现均匀装车是行之有效的方法。
虽然很多PLC生产厂家推出FZ模糊推理模块,但这些专用模块价格昂贵,需使用专门的编程设备,成本高通用性差,所以自主开发基于模糊控制理论的PLC控制器有很大的工程价值。
本章首先介绍了模糊控制的基本原理、模糊控制系统及模糊控制器的设计步骤;然后在对煤位高度控制系统分析的基础上,设计基于模糊理论的PLC控制,分别从查询表计算生成和PLC程序查询两个部分进行设计。
4.2模糊控制原理(Fuzzy Control Principle)4.2.1模糊控制理论(Fuzzy Control Theory)模糊控制理论是由美国加利福尼亚大学的自动控制理论专家L.A.Zadch教授首次提出,由英国的Mamdani首次用于工业控制的一种智能控制技术[46]。
模糊控制(FUZZY)技术是一种由数学模型、计算机、人工智能、知识工程等多门科学领域相互渗透、理论性很强的科学技术。
模糊控制是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一中计算机智能控制[47-48]。

模糊控制器设计模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制。
从线性控制与非线性控制的角度分类,模糊控制是一种非线性控制。
从控制器的智能性看,模糊控制属于智能控制的范畴,而且它已成为目前实现智能控制的一种重要而又有效的形式。
1模糊控制的基本思想在自动控制技术产生之前,人们在生产过程中只能采用手动控制方式。
手动控制过程首先是通过观测被控对象的输出,其次是根据观测结果做出决策,然后手动调整输入量,操作工人就是这样不断地完成从观测、决策到调整,实现对生产过程的手动调整输入量,操作工人就是这样不断地完成从观测、决策到调整,实现对生产过程的手动控制。
这三个步骤分别是由人的眼-脑-手来完成的。
后来,由于科学技术的进步,人们逐渐采用各种测量装置(如传感器)代替人眼,完成对被控制量的观测任务;利用各种控制器(如PID调节器)取代人脑的作用,实现比较、综合被控制量与给定量之间的偏差,控制器所给出的输出信号相当于手动控制过程中人脑的决策;使用各种执行机构(如电动机)对被控对象施加某种控制作用,这就起到了手动控制中手的调整作用。
上述由测量装置、控制器、被控对象及执行机构组成的自动测控系统,就是人们所熟知的常规负反馈控制系统。
常规控制首先要建立精确数学模型,但是对一些复杂的工业过程,建立精确的数学模型是非常困难的,或者是根本不可能的。
于是常规控制技术在这里就遇到了不可逾越的障碍。
但是,熟练的技术操作人员,通过感官系统进行现场观察,再根据自己的经验就能很容易地实现这类控制过程,于是就产生了一个问题,能否把人的操作经验总结为若干条控制规则,并设计一个装置去执行这些规则,从而对系统进行有效的控制呢?答案是肯定的。
这种装置就是模糊控制器。
与传统的PID控制相比,模糊控制有其明显的优越性。
由于模糊控制实质上是用计算机去执行操作人员的控制策略,因而可以避开复杂的数学模型。
对于非线性,大滞后及带有随机干扰的复杂工业对象,由于数学模型难以建立,因而传统的PID控制也就失效,而对这样的系统,设计一个模糊控制器,却没有多大困难。
目录摘要 (1)1 模糊控制简介 (1)1.1 模糊控制方法的研究现状 (2)1.2 模糊控制的特点 (2)1.3模糊控制的研究对象 (3)1.4模糊控制的展望 (3)2 模糊控制器的结构与工作原理 (4)2.1基本结构与组成 (4)2.2一般模糊控制器各主要环节的功能 (4)2.3隶属函数的确定原则和基本确定方法 (5)2.4模糊条件语句与模糊控制规则 (6)2.5模糊量的判决方法 (6)2.6模糊控制规则的设计和模糊化方法 (8)2.7解模糊化 (8)3 模糊控制器的设计 (9)4 关于模糊(及智能)控制理论与技术发展的思考 (11)参考文献 (12)摘要摘要:本文主要介绍了模糊控制系统的研究现状、特点,以及模糊控制器的结构与工作原理。
同时对模糊控制器的设计进行了介绍和分析,对于其基本步骤和过程进行陈述,最后就模糊(及智能)控制理论与技术发展进行总结性的思考。
关键词:模糊控制;模糊控制器;模糊量;模糊化方法引言模糊控制是近代控制理论中的一种基于语言规则与模糊推理的高级控制策略和新颖技术,它是智能控制的一个重要分支,发展迅速,应用广泛,实效显著,引人关注[13]。
随着科学技术的进步,现代工业过程日趋复杂,过程的严重非线性、不确定性、多变量、时滞、未建模动态和有界干扰,使得控制对象的精确数学模型难以建立,单一应用传统的控制理论和方法难以满足复杂控制系统的设计要求。
而模糊控制则无需知道被控对象的精确数学模型,且模糊算法能够有效地利用专家所提供的模糊信息知识,处理那些定义不完善或难以精确建模的复杂过程。
因此,模糊控制成为了近年来国内外控制界关注的热点研究领域。
1 模糊控制简介模糊控制是一种以模糊集合论、模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。
显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。
本章着重介绍模糊控制的基本思想、模糊控制的基本原理、模糊控制器的基本设计方法和模糊控制系统的性能分析。
1.模糊控制器的设计步骤
模糊控制器的设计步骤主要包括以下几个步骤:
1.确定控制系统的输入和输出:在开始设计模糊控制器之前,需要明确控制系统的输入和输出是什么。
输入可以是系统的状态或者外部的信号,输出可以是系统的输出或者控制器的输出。
2.确定输入和输出的量化范围:输入和输出的范围需要进行量化,以便在模糊控制器中进行处理。
量化范围通常是以数字的形式表示,例如温度范围从0
到100度。
3.确定模糊变量:模糊变量是指控制系统中模糊化的变量,例如温度可以被表示为模糊变量“冷”、“温暖”和“热”。
模糊变量的数量和它们之间的关系需要根据实际情况进行确定。
4.定义输入、输出模糊集:输入、输出模糊集是指输入、输出变量的取值范围及其对应的模糊语言变量。
5.定义输入、输出隶属函数:隶属函数用于描述输入、输出变量的不确定性或模糊性。
6.建立模糊控制规则:根据实际需求和系统特性,建立合适的模糊控制规则。
7.建立模糊控制表:根据模糊控制规则,建立模糊控制表,用于指导模糊控制器的实际运行。
8.模糊推理:根据输入的变量和建立的模糊控制表,进行模糊推理,得到相应的输出结果。
9.反模糊化:将模糊推理得到的输出结果进行反模糊化处理,得到具体的控制量或决策结果。
模糊控制器的设计一、 PID 控制器的设计我们选定的被控对象的开环传递函数为327()(1)(3)G s s s =++,采用经典的PID 控制方法设计控制器时,由于被控对象为零型系统,因此我们必须加入积分环节保证其稳态误差为0。
首先,我们搭建simulink 模型,如图1。
图1simulink 仿真模型由于不知道Kp ,Kd ,Ki ,的值的大致范围,我们采用signal constraints 模块进行自整定,输入要求的指标,找到一组Kp ,Kd ,Ki 的参数值,然后在其基础上根据经验进行调整。
当选定Kp=2,Kd=0.95,Ki=0.8时,可以得到比较好的响应曲线。
调节时间较短,同时超调量很小。
响应曲线如图2所示。
图2 PID 控制响应曲线将数据输出到工作空间,调节时间ts =2.04s ,超调量%0σ=。
可以看出,PID 控制器的调节作用已经相当好。
二、 模糊控制器的设计1、模糊控制器的结构为:图3 模糊控制器的结构2、控制参数模糊化控制系统的输入为偏差e 和偏差的变化率ec ,输出为控制信号u 。
首先对他们进行模糊化处理。
量化因子的计算max min**max minx x k x x -=- 比例因子的计算**max minmax minu u k u u -=-其中,*max x ,*min x 为输入信号实际变化范围的最大最小值;max x ,min x 为输入信号论域的最大最小值。
*max u ,*min u 为控制输出信号实际变化范围的最大最小值,max u ,min u 输出信号论域的最大最小值。
相应的语言值为NB ,NM ,NS ,ZO ,PS ,PM ,PB 。
分别表示负大、负中、负小、零、正小、正中、正大。
3、确定各模糊变量的隶属函数类型语言值的隶属度函数就是语言值的语义规则,可分为连续式隶属度函数和离散化的隶属度函数。
本系统论域进行了离散化处理,所以选用离散量化的隶属度函数。
模糊控制系统的设计:分析模糊控制系统的设计原则、方法和应用引言在现代控制系统中,模糊控制是一种常用的方法,它能够有效地应对复杂、不确定、非线性的系统。
模糊控制系统的设计原则、方法和应用十分重要,对于提高系统的性能和鲁棒性具有重要意义。
模糊控制系统的基本原理模糊控制系统的设计是基于模糊逻辑的,而模糊逻辑是一种能够处理模糊信息的逻辑。
模糊逻辑通过建立“模糊集合”和“模糊规则”来描述系统的行为。
模糊集合是指在某个范围内具有模糊边界的集合,例如“大”和“小”。
而模糊规则是一种以模糊集合为输入和输出的规则,例如“如果输入是大,则输出是小”。
模糊控制系统通过将输入信号模糊化,然后根据模糊规则进行推理,最后将输出信号去模糊化,从而实现对系统的控制。
模糊控制系统的设计原则原则一:定义合适的输入与输出在设计模糊控制系统时,首先需要明确输入和输出的变量及其范围。
输入变量是指模糊控制系统的输入信号,例如温度、压力等。
输出变量是指模糊控制系统的输出信号,例如阀门开度、电机转速等。
合适的输入与输出定义能够提高系统的可靠性和鲁棒性,从而有效地控制系统。
原则二:选择适当的隶属函数隶属函数是用来描述模糊集合的函数,它决定了模糊集合的形状和分布。
在选择隶属函数时,需要考虑系统的非线性特性和响应速度。
常用的隶属函数有三角形、梯形等。
选择适当的隶属函数能够提高系统的性能和鲁棒性。
原则三:建立有效的模糊规则模糊规则是模糊控制系统的核心,它决定了输入和输出之间的关系。
在建立模糊规则时,需要考虑系统的特性和控制目标。
模糊规则可以通过专家经验、试错法和数据分析等方式获取。
建立有效的模糊规则能够提高系统的控制能力。
模糊控制系统的设计方法方法一:典型模糊控制系统的设计方法典型模糊控制系统的设计方法包括以下几个步骤:1.确定控制目标和要求,明确输入和输出的定义;2.确定隶属函数的形状和分布,选择适当的隶属函数;3.根据系统的特性和控制目标,建立模糊规则;4.设计模糊推理机制,实现对输入和输出的模糊化和去模糊化;5.建立模糊控制系统的仿真模型,进行系统性能和鲁棒性分析;6.根据仿真结果进行参数调整和系统优化;7.实际应用中进行系统测试和调整。