差分干涉雷达技术
- 格式:docx
- 大小:1.08 MB
- 文档页数:12
RCS(Radar Cross Section,雷达散射截面积)的测量方法主要有以下几种:
1.实验室测量法:在实验室内,利用雷达波照射目标,通过测量反射回来的雷达波强度来计算目标的RCS。
实验室测量法可以模拟各种不同的目标场景,但需要使用精密的测量设备和专业的技术人员。
2.外场测量法:在实地环境中,利用雷达波照射目标,通过测量反射回来的雷达波强度来计算目标的RCS。
外场测量法需要选择合适的测量场地,并考虑自然环境的影响,如大气条件、地面反射等。
3.差分干涉合成孔径雷达(D-ISAR)技术:这是一种利用雷达波束的干涉效应来获取目标图像的技术。
通过将雷达波束分成两个子波束,并使它们在目标表面产生干涉,从而形成目标表面的高分辨率图像。
通过分析图像,可以计算目标的RCS。
4.极化雷达技术:极化雷达是一种利用不同极化状态的电磁波来获取目标信息的技术。
极化雷达可以发射不同极化状态的电磁波,并测量反射回来的电磁波的极化状态,从而得到目标的RCS。
5.双基地雷达技术:双基地雷达是一种利用两个不同的发射和接收站来获取目标信息的技术。
通过将发射站和接收
站分开设置,可以避免单基地雷达的一些限制,如地面反射和大气干扰等。
双基地雷达技术可以用于测量目标的RCS。
以上是RCS测量方法的几种常见方式,每种方法都有其优缺点和应用场景。
选择合适的测量方法需要考虑目标的特点和测量要求。

差分干涉相位模型概述说明以及解释1. 引言1.1 概述本文旨在介绍差分干涉相位模型,并对其进行解释和说明。
差分干涉相位模型是一种基于差分干涉成像技术和相位模型基础原理的研究方法,广泛应用于地质勘探、灾害监测与预警以及农业生产等领域。
通过对差分干涉相位计算方法的探索和相位变化物理机制的解释,我们可以更好地理解和应用这一模型。
1.2 研究背景随着科学技术的不断发展,遥感数据处理和分析成为许多领域研究的重要手段之一。
而差分干涉成像技术作为一种强大的遥感数据处理工具,能够通过计算两个或多个时间点的合成孔径雷达(SAR)图像之间的相位差异,提供高精度的地表形变信息。
1.3 目的与意义本文旨在系统概述差分干涉相位模型,并深入解释其基本原理和计算方法。
同时,还将通过实际案例研究,展示该模型在地质勘探、灾害监测与预警以及农业生产中的应用实践。
通过这些工作,我们可以更好地理解和把握差分干涉相位模型在不同领域中的潜力和局限性,为未来的研究提供参考与指导。
以上是“1. 引言”部分内容,简要介绍了文章的背景、目的和意义。
接下来,我们将详细阐述差分干涉相位模型的概述,在第2节中对其进行全面讨论。
2. 差分干涉相位模型概述:2.1 差分干涉成像技术简介:差分干涉成像技术是一种基于干涉原理的高精度测量方法。
它通过使用两个或多个相干波束,利用相位差信息来获取目标物体的形态、运动以及表面高程等方面的信息。
2.2 相位模型基础原理:差分干涉相位模型是差分干涉成像技术中的重要组成部分。
它是根据波束在传播过程中受到目标物体引起的相位延迟,从而实现对目标物体进行成像和测量的过程。
在差分干涉相位模型中,我们首先需要获取两个或多个相干波束之间的相位差信息。
这可以通过构建一个参考光束和待测光束之间的干涉装置来实现。
当参考光束和待测光束在目标物体上发生反射或透射后重新合并时,由于光束经历了不同路径长度,其相位就会发生变化。
通过适当处理这些变化后得到的数据,我们可以恢复出目标物体表面或形态上微小细节的信息。

dinsar概念-回复dinsar概念是指差分干涉合成孔径雷达(DInSAR)技术,它是一种用来监测地面变形的遥感技术。
本文将详细介绍DInSAR的原理、应用领域以及在地质灾害和地表沉降监测中的具体应用。
一、DInSAR的原理DInSAR技术利用合成孔径雷达(SAR)的观测数据来测量地表变形。
SAR 是一种主动遥感技术,通过发射雷达波束并记录回波来获取地表信息。
DInSAR则是通过比较两个或多个雷达成像的干涉图像来提取地表变形信息。
DInSAR的原理基于两个基本概念:干涉和差分。
干涉是指将两个SAR图像相减,得到一个干涉图像,其中包含了地表变形引起的相位差信息。
差分是指将两个干涉图像相除,得到一个差分干涉图像,它反映了地表变形的相对变化。
具体而言,DInSAR技术的工作流程如下:首先,收集一对或多对SAR图像,这些图像需要在时间和空间上具有一定的重叠。
然后,进行图像配准,即将不同时间或空间的图像对齐。
接下来,进行干涉处理,通过相位引导的配准技术计算干涉图像。
最后,进行差分处理,得到差分干涉图像,并使用数据模型和数学方法来提取和解释地表变形信息。
二、DInSAR的应用领域DInSAR技术在地理学、地球物理学、地质灾害等领域具有广泛的应用。
下面将分别介绍DInSAR在这些领域中的应用案例。
1. 地壳运动监测:DInSAR可以用来监测地壳的上升或下沉、水平位移等地表变形情况。
通过对长时间序列的DInSAR数据进行分析,可以揭示地壳运动背后的地质和地球物理过程。
2. 地震监测:地震引起的地表变形可以通过DInSAR来监测。
这种监测可以提供地震活动的时空演化过程,有助于理解地震的震源震源机制和地下断裂结构。
3. 火山监测:DInSAR可以用来监测火山的喷发活动和未喷发火山的斜坡稳定性。
通过长时间的监测和分析,可以找到预警信号和监测火山的潜在危险。
4. 地表沉降监测:地表沉降通常与地下水抽取、地下矿产开采等人类活动相关。
DInSAR全称Differential Interferometric Synthetic Aperture Radar,合成孔径雷达差分干涉测量技术。
➢InSAR技术提取地表DEM,需要假设两次成像期间,地表没有发生变化,地物产生的随机相位也是不变的。
➢而DInSAR则是一种根据多期SAR数据,获取地表形变信息的方法之一。
根据差分干涉所需影像的多少,DInSAR可以分为:二轨法,三轨法和四轨法。
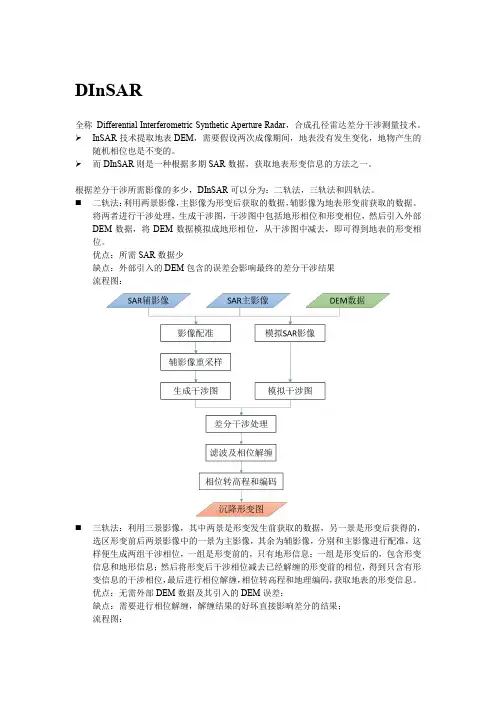
⏹二轨法:利用两景影像,主影像为形变后获取的数据,辅影像为地表形变前获取的数据。
将两者进行干涉处理,生成干涉图,干涉图中包括地形相位和形变相位,然后引入外部DEM数据,将DEM数据模拟成地形相位,从干涉图中减去,即可得到地表的形变相位。
优点:所需SAR数据少缺点:外部引入的DEM包含的误差会影响最终的差分干涉结果流程图:⏹三轨法:利用三景影像,其中两景是形变发生前获取的数据,另一景是形变后获得的,选区形变前后两景影像中的一景为主影像,其余为辅影像,分别和主影像进行配准,这样便生成两组干涉相位,一组是形变前的,只有地形信息;一组是形变后的,包含形变信息和地形信息;然后将形变后干涉相位减去已经解缠的形变前的相位,得到只含有形变信息的干涉相位,最后进行相位解缠,相位转高程和地理编码,获取地表的形变信息。
优点:无需外部DEM数据及其引入的DEM误差;缺点:需要进行相位解缠,解缠结果的好坏直接影响差分的结果;流程图:四轨法:与二轨法类似,但是不需要外部引入的DEM数据,需要四景影像;基本思路是将形变发生前获取的两幅影像进行干涉处理,得到形变前的干涉相位,只包含地形信息;然后将形变后的两景影像进行干涉处理,得到形变后的干涉相位。
从形变后的干涉相位中减去形变前的干涉相位,得到地表的形变相位,然后相位解缠,得到差分干涉图。
流程图:InSAR获取DEM条件:两期影像获取期间地物没有明显的形变,且地物产生的随机相位是相同的;流程图:。
关于InSAR和D-InSAR的数据处理一、合成孔径雷达干涉技术(InSAR)合成孔径雷达干涉技术出现于20世纪60年代末.它是SAR与射电天文学干涉测量技术结合的产物。
当SAR扫过地面同一目标区域时,利用成像几何关系,通过成像、一些特殊的数据处理和几何转换,即可提取地表目标区域的高程信息和形变信息。
由于InSAR 技术有效利用了SAR的回波相位信息,测高精度为米级甚至亚米级,而一般雷达立体测量方法只利用灰度信息来实现三维制图,测高精度仅能达到数十米,因此该技术迅速引起了地学界及相关领域科研工作者的极大兴趣,现已成为微波遥感领域的研究热点.干涉合成孔径雷达利用多个接收天线观测得到的回波数据进行干涉处理,可以对地面的高程进行估计,对海流进行测高和测速,对地面运动目标进行检测和定位。
接收天线相位中心之间的连线称为基线,按照基线和航向的夹角,人们将InSAR分为基线垂直于航向的切轨迹干涉和沿航向的顺轨迹干涉。
切轨迹干涉可以快速提取地面的三维信息,顺轨迹干涉主要用于动目标检测和海洋水流与波形测量。
二、InSAR 基本原理InSAR 测量模式主要有两种:一种是双天线单轨(Single Pass)模式,主要用来生成数字高程模型,一般用于机载SAR;另一种是双轨(Two Pass) 模式,主要用于获取地表变形,一般用于星载SAR.下面以重复轨道干涉测量为例,简要介绍InSAR 技术的基本原理(见图1).假设卫星以一定的时间间隔和轨道偏离(通常为几十米到1km 左右)重复对某一区域成像,并在两次飞行过程中处于不同的空间位置1S 和2S ,则空间干涉基线向量为B,长度为B;基线向量B 与水平方向的夹角为基线倾角α。
1S 和2S 至地面点P 的斜距分别为R 和R+△R;将基线沿视线方向分解,得到平行于和垂直于视线向的分量||B 、'B ;H 为1S 到参考面的高度;从1S 发射波长为λ的信号经目标点P 反射后被1S 接收,得到测量相位1ϕ,114arg{}R u πϕλ=+(1)同样,另一空间位置2S 上测量到相位2ϕ,224()arg{}R R u πϕλ=+∆+(2)式中,arg{1u }和arg{2u }表示不同散射特性造成的随机相位.假设两幅图中随机相位的贡献相同,则1S 和2S 关于目标P 点的相位差124R πφϕϕλ=-=-∆(3) 也称为干涉相位,可由经过配准的两幅SAR SLC 图共扼相乘得到.根据图1中的几何关系并利用余弦定理可得: 222()sin()2R B R R RBθα+-+∆-=(4) cos h H R θ=-(5)由于R R ∆且R B ,则||sin()R B B θα∆≈-=(6) (4)、(5) 两式即为In SAR 确定高程的原理性公式.三、合成孔径雷达差分干涉测量(D-InSAR)D-InSAR 技术是在主动式微波合成孔径雷达 SAR 相干成像基础上发展起来的,它以合成孔径雷达复数据提供的相位信息为信息源,可从包含目标区域地形和形变等信息的一幅或多幅干涉纹图中提取地面目标的微小形变信息。
DInSAR全称Differential Interferometric Synthetic Aperture Radar,合成孔径雷达差分干涉测量技术。
➢InSAR技术提取地表DEM,需要假设两次成像期间,地表没有发生变化,地物产生的随机相位也是不变的。
➢而DInSAR则是一种根据多期SAR数据,获取地表形变信息的方法之一。
根据差分干涉所需影像的多少,DInSAR可以分为:二轨法,三轨法和四轨法。
⏹二轨法:利用两景影像,主影像为形变后获取的数据,辅影像为地表形变前获取的数据。
将两者进行干涉处理,生成干涉图,干涉图中包括地形相位和形变相位,然后引入外部DEM数据,将DEM数据模拟成地形相位,从干涉图中减去,即可得到地表的形变相位。
优点:所需SAR数据少缺点:外部引入的DEM包含的误差会影响最终的差分干涉结果流程图:⏹三轨法:利用三景影像,其中两景是形变发生前获取的数据,另一景是形变后获得的,选区形变前后两景影像中的一景为主影像,其余为辅影像,分别和主影像进行配准,这样便生成两组干涉相位,一组是形变前的,只有地形信息;一组是形变后的,包含形变信息和地形信息;然后将形变后干涉相位减去已经解缠的形变前的相位,得到只含有形变信息的干涉相位,最后进行相位解缠,相位转高程和地理编码,获取地表的形变信息。
优点:无需外部DEM数据及其引入的DEM误差;缺点:需要进行相位解缠,解缠结果的好坏直接影响差分的结果;流程图:四轨法:与二轨法类似,但是不需要外部引入的DEM数据,需要四景影像;基本思路是将形变发生前获取的两幅影像进行干涉处理,得到形变前的干涉相位,只包含地形信息;然后将形变后的两景影像进行干涉处理,得到形变后的干涉相位。
从形变后的干涉相位中减去形变前的干涉相位,得到地表的形变相位,然后相位解缠,得到差分干涉图。
流程图:InSAR获取DEM条件:两期影像获取期间地物没有明显的形变,且地物产生的随机相位是相同的;流程图:。
雷达干涉相消原理雷达干涉相消原理是一种利用雷达技术实现相位干涉和相位调控的方法,通过相位的反馈控制,实现对干扰信号的抵消,从而提高雷达系统的工作性能和抗干扰能力。
下面将从基本原理、应用场景和发展前景三个方面来介绍雷达干涉相消原理。
一、基本原理雷达干涉相消原理基于干涉技术,利用两个或多个雷达天线之间的相位差来实现干扰信号的抵消。
其基本原理可以简单地归纳为以下几点:1. 相位差测量:两个或多个雷达天线同时接收到同一目标的回波信号,通过测量接收到的信号的相位差来确定目标的位置和速度。
2. 相位差反馈:将测量到的相位差反馈给发射机,通过相位调控来控制发射信号的相位,使其与干扰信号的相位相反。
3. 干涉相消:当发射信号与干扰信号的相位相反时,两者相互抵消,目标信号得以突出。
二、应用场景雷达干涉相消在军事、航空航天、气象、地质勘探等领域有着广泛的应用。
1. 军事领域:在军事雷达系统中,干扰信号常常是敌方对雷达系统的干扰,通过干涉相消技术可以抵消干扰信号,提高雷达系统的抗干扰能力和目标探测性能。
2. 航空航天领域:在航空航天领域,雷达干涉相消技术可以应用于飞机、舰船等载体的导航、定位和目标追踪等方面,提高导航精度和目标探测能力。
3. 气象领域:气象雷达干涉相消技术可以应用于天气预报和气象灾害预警等方面,提高气象监测的精度和准确性。
4. 地质勘探领域:在地质勘探领域,雷达干涉相消技术可以应用于地下资源勘探、地质灾害监测和地震预警等方面,提高勘探和监测的效率和准确性。
三、发展前景雷达干涉相消技术在各个领域的应用前景广阔,随着技术的不断发展和改进,其性能和应用范围将得到进一步提升。
1. 技术改进:随着雷达技术的不断进步,雷达干涉相消技术的算法和硬件设备将不断改进和优化,提高系统的性能和稳定性。
2. 多天线系统:多天线系统是雷达干涉相消的重要组成部分,随着多天线技术的发展,多天线系统可以实现更精确的相位测量和相位调控,提高干涉相消的效果。
四个星载SAR干涉测量技术1.干涉SAR(InSAR)测量把以DEM 测量为主要应用的SAR干涉测量技术称为InSAR技术。
它利用雷达向目标区域发射微波,然后接收目标反射的回波,得到同一目标区域成像的SAR 复图像对,若复图像对之间存在相干条件,SAR复图像对共轭相乘可以得到干涉图,根据干涉图的相位值,得出两次成像中微波的路程差,从而计算出目标地区的地形、地貌以及表面的微小变化,可用于数字高程模型建立、地壳形变探测等。
2.差分SAR干涉( D-In SAR)测量Differential SAR Interferometry 1993 年Massonnet 等人在《自然》上发表了研究1992 年在美国加州的Landers 的地震学术论文,用“两轨法”差分干涉测量技术获取的相对精度达毫米级的地震形变图像,在国际学术界引起轰动。
随后又提出“三轨法”差分干涉测量技术。
“两轨法”差分干涉测量技术无需进行相位解缠,但需要额外的DEM 数据信息,可能在引入DEM数据的同时引入误差。
“三轨法”无需而外的DEM信息,数据间的配准也较易实现。
D-In SAR技术不仅用于地震形变监测,还用于火山活动检测。
3.永久散射体SAR干涉( PS-In SAR)测量Permanent Scatter SAR Interferometry 1999年,Ferretti 提出PS-In SAR。
通过提取时间序列上保持稳定的ps点和对其相位进行时间、空间上的分析、分解,得到了包括高程修正量、地表运动率、大气相位和地表相位在内的多个相位成分。
永久散射体是指在长期保持较高相干性且体积小于像元尺寸的散射体。
PS-In SAR最大程度上降低了大气效应对SAR干涉测量的影响,提高了SAR数据的利用率和处理精度。
PS-In SAR空间采样率高,测量精度高,大面积测量成本低,GPS时间采样率高,水准测量结果可靠性高。
PS-In SAR在地表沉降方面具有很好的效果。
D-InSAR技术中空间基线校正方法研究的开题报告1. 研究背景和意义:D-InSAR (差分干涉合成孔径雷达干涉)技术是一种利用遥感数据进行地面形变测量的高精度方法。
在D-InSAR技术中,空间基线是干涉测量的一个重要参数,而空间基线的不正确选择和校正会严重影响干涉测量结果的精度和可靠性。
因此,在D-InSAR技术中空间基线的校正方法的研究是非常重要的。
2. 研究内容和方法:本研究将通过对现有的D-InSAR空间基线校正方法(如JPL-DLR方法、SBAS方法等)进行全面分析、比较和评价,研究空间基线校正误差的来源和影响因素,并针对现有方法中存在的一些问题进行改进和优化,提出更加精确和可靠的空间基线校正方法。
具体研究内容包括:(1)分析现有的D-InSAR空间基线校正方法,评价其优缺点;(2)研究空间基线校正误差的来源和影响因素;(3)改进现有方法中存在的问题,提出更加精确和可靠的空间基线校正方法;(4)利用已有的SAR数据进行实验验证和结果分析。
3. 研究意义和创新点:本研究将有助于提高D-InSAR技术地面形变测量的精度和可靠性,有益于地质灾害预警、地下水资源管理、地表形变监测等领域。
本研究的创新点主要体现在以下几个方面:(1)全面分析现有的D-InSAR空间基线校正方法;(2)研究空间基线校正误差的来源和影响因素;(3)改进现有方法中存在的问题,提出更加精确和可靠的空间基线校正方法;(4)实验验证和结果分析。
4. 预期成果和进度安排:本研究的预期成果包括:(1)分析现有的D-InSAR空间基线校正方法,评价其优缺点;(2)研究空间基线校正误差的来源和影响因素;(3)改进现有方法中存在的问题,提出更加精确和可靠的空间基线校正方法;(4)进行实验验证和结果分析,取得可靠的数据并撰写学术论文。
本研究的进度安排如下:时间节点内容2022年1-3月 D-InSAR技术及其空间基线校正方法的研究2022年4-6月对现有空间基线校正方法进行评价2022年7-9月确定改进空间基线校正方法的思路2022年10-12月进行实验验证和数据分析2023年1-3月撰写学术论文5. 参考文献:[1] 潘振兴, 王绍林, 王丰隆等. 基于SBAS的卫星干涉测量技术的研究与应用[J]. 测绘通报, 2015(3):19-22.[2] 陈骑亚, 张海洋, 许元勇等. 一种改进的D-InSAR单基线绝对定位方法[J]. 武汉大学学报(信息科学版), 2019(4):532-536.[3] 徐俊林, 林志强, 王舸等. SBAS算法在北台地区土地沉降监测中的应用[J]. 星地通信技术, 2020(2):131-134.[4] Ferretti A, Prati C, Rocca F. Permanent scatterers in SAR interferometry[J]. IEEE Transactions on geoscience and remote sensing, 2001, 39(1):8-20.。
第27卷 第4期地 震 学 报Vol.27,No.4 2005年7月 (423~430)ACT A SE I S MOLOGI CA SI N I CA Jul.,2005 文章编号:025323782(2005)0420423208巴姆地震地表形变的差分雷达干涉测量3夏 耶(德国波茨坦D214473德国波茨坦地球科学研究中心)摘要 利用星载合成孔径差分雷达干涉技术和E NV I S AT卫星雷达数据,获得了2003年12月26日伊朗巴姆的里氏6.5级地震引起的同震地表形变场,并详细地介绍了信号处理的过程.利用地震前后的相干图的差异及形变场的突变棱线,精确确定了地面上断层裂缝的位置、形状和长度.这对震源理论模型的参数估计提供了依据.由雷达干涉技术测量得到的形变场与理论模型模拟的结果一致.关键词 微波遥感 雷达干涉 地震 形变测量中图分类号:P313.2 文献标识码:A1 合成孔径雷达及干涉的基本原理合成孔径雷达是一种微波侧视成像雷达(Curlander,Mc Donough,1991).为获取大面积地面图象,载体多为航空航天飞行器,如飞机、航天飞机和卫星.由于它的全天候和高分辨率工作特性,近20年来,获得了比光学传感器更快的发展.其应用领域遍及军事、测绘、气象、地质地震、海洋冰川、农林业等等.从原理上说,它与真实孔径雷达一样,都是发射一种线性调濒脉冲信号.由于雷达随着载体在运动中不断地发射和接收脉冲信号,回波信号的延迟将是运动着的雷达与目标相对位置的函数.若某一点目标距雷达距离是R,其微波反射系数为σ,雷达增益为A,载波波长为λ,则在雷达图象上该点目标值为σ0A e-j4πRλ(1) 雷达干涉的原理,相对于雷达成像来说要简单得多.如果雷达在不同的位置上对同一个点目标进行两次扫描,便可得到该目标的两幅图象f1和f2,这里不考虑反射系数f i=e-4πR iλ i=1,2(2) 这两次扫描,可以用两副天线同时进行,即所谓的单轨模式;也可以用一副或不同的天线在不同的时候进行,这便是所谓的重复轨道模式.根据式(2),并参考图1,很容易推导出雷达干涉进行地形测量的机理.在图1中,P是地面上高度为h的一点,雷达在S和S1两个不同的位置上得到P点的两幅图象f1和f2,称为主图象和副图象.点到雷达的距离分别为R和R1,雷达高H,俯视角θ.B1是S与S1之间的距离,叫基线,它的水平角为α.若以雷达射线为基准,基线B1可分解为投影到雷达射线上的一个水平分量B1||和一个垂直于雷达射线的垂直分量B1⊥.所谓干涉,即将两幅雷达图象共轭相乘.乘积即为干涉图,其相位叫干涉条纹图, 32004206211收到初稿,2005205218收到修改稿并决定采用.图1 雷达干涉的几何关系示意图记为Φ1.它等于Φ1=-4π(R -R 1)λ=-4πλB 1sin (θ-α)(3) 记P 0为参考地平面上的一点,距雷达S 的距离也为R.这时雷达对P 0的俯视角缩小了δθ(图中未标出),变为θ0.如果雷达在S 和S 1也对P 0成像,则其干涉相位应为Φ0=-4π(R -R 1)λ=-4πλB 1sin (θ0-α)(4)式中,B 1sin (θ0-α)实际上就是S 和S 1对P 0成像时基线B 在S P 0射线上的水平分量B 0||.将参考地平面的干涉相位Φ0从Φ1中减去,即式(3)减式(4),也就是所谓的去平过程,其差为ΔΦ1=-4πλB 1cos (θ-α)δθ=-4πh λR sin (θ0)B 1⊥(5)在式(5)中,做了δθ≈sin (δθ)及R sin (δθ)≈PP 0=h /sin (θ0)的近似.由于式(5)中除了P 点的高程h 以外都是已知量,故该高程可通过去平后的干涉图直接求出.这便是用合成孔径雷达干涉进行地形测绘的基本原理.如果P 点发生了位移,到了P ′点,并出现在第二张副图象上,雷达的位置是S 2,则P ′到雷达的距离为它原来的距离R 2加一个变化ρ.在主图象与第二幅副图象构成的第二幅干涉图中,P ′点的干涉相位为Φ2=-4π(R -R 2-ρ)λ=-4π(R -R 2)λ+4πλρ(6)可以看到,位移在干涉图中的贡献与基线无关.与第一幅干涉图一样,将这第二幅干涉图中的相应的参考地平面的干涉相位减去,剩下的是高程分量和位移分量:ΔΦ2=-4πh λR sin (θ0)B 2⊥+4πλρ(7)两幅干涉图中的高程分量只不过是标度不同而已.将第一幅干涉图乘上一个因子后便可从第二幅干涉图中全然减去,在差分干涉图中得到位移分量4πλρ=ΔΦ2-B 2⊥B 1⊥ΔΦ1(8)这便是差分雷达干涉测量微小形变的基本原理.这里的位移ρ还只是真正的位移在雷达射线上的投影.要找到真正的位移矢量还需要先验知识或其它的附加条件和手段.2 数据处理与结果2.1 数据为了用合成孔径雷达干涉测量巴姆地震引起的形变场,欧洲航天局(ES A )提供了7幅424 地 震 学 报 27卷ENV I S AT卫星的AS AR雷达图象数据,都是I S2模式和VV极化.其中4幅是降轨数据,3幅是升轨数据.轨道号分别是6687,9192,9693,10194,8956,9958,10459,相应的接收日期依次是2003年6月11日、2003年12月03日、2004年1月7日、2004年2月11日、2003年11月16日、2004年1月25日和2004年2月29日.升轨数据中,2004年1月25日接收的数据因多普勒频率差异太大不能使用.4幅降轨数据中,震前震后各两幅,可各自配对产生高程模型.差分干涉则选震前震后各一幅配对.可用的两幅升轨数据只能用来差分.所有的数据按升轨降轨归类配准,配准的精度为∀5个像元,选用复相干系数作配准的判据.2.2 基线估算在雷达干涉信号处理中,基线的估算至关重要.由前面的分析可知,干涉图中任一点的相位,都是由该点对应的在参考平面上的参考点的干涉相位与其高程所决定的干涉相位的和(不考虑位移).而这两者正分别由基线的水平分量和垂直分量来标度.值得一提的是,地表上的一点与其在参考平面上的参考点虽然不是同一点,但在雷达图象上,它们是重合的.因此,所谓基线估算,就是把雷达图象上每一点都看成是在参考平面上,然后求每一点对应的水平基线和垂直基线.在主图象中,每一个距离行对应于卫星一个位置.这里所说的一个距离行是对主图象定义的,副图象配准好后,它的一个距离行可能来自原来的若干行.换句话说,配准后副图象中一个距离行要对应于雷达不同的位置.雷达对同一距离行上的点的距离和视角是不一样的.因此,在同一距离行上各点有各点的水平基线和垂直基线,并且不是线性变化的.卫星轨道的不平行造成同一距离行上每个点对应的基线不相等.在一幅标准ENV I S AT卫星雷达图象对应的飞行时间内,一般为16s,基线的变化可达数米,甚至上10m.E NV I S AT雷达数据产品同时提供了相应的卫星轨道数据和其它的辅助数据.它不像它的前辈ERS卫星那样有精度为几十厘米的精密轨道数据(Reigber et al,1996),计算干涉图时有必要进行基线校正.要估算基线,实际上就是要估算干涉图中每一参考点在参考地平面上的坐标及对应的卫星在空间的坐标.根据主图象数据产品提供的卫星轨道数据和与其对应的图象时间数据,可以首先确定每一距离行对应的卫星的坐标.然后求这一距离行上每一点的坐标.一般选取地球的椭球体模型的表面作为参考地平面(坐标系为W G84).也就是说,每一点都应在这椭球体表面上.它与卫星的距离则由雷达接收天线的接收时间窗口决定.它与卫星的连线应与卫星空间轨道垂直,因为在成像处理时,将它定位在多普勒频率等于0的位置上.在这些条件的限制下,干涉图中每一参考点的坐标(xp,y p,z p)应满足下面的方程组(Curlander,1982):(x2p+y2p)R2e +z2pR2p=12λPs (Vs-V p)・(S-P)=0(S-P)・(S-P)=R s(9)式中,Rs 是参考点到卫星的距离,Re和Rp分别是椭球体的长短轴,Vs是卫星的速度矢量,V p是参考点因地球自转引起的速度矢量,S是卫星的坐标向量,P即参考点的坐标向量(xp ,y p,z p).解出(x p,y p,z p)以后,由参考点引第二条卫星轨道的垂线,便可得到辅卫星524 4期 夏 耶:巴姆地震地表形变的差分雷达干涉测量的坐标.有了卫星和参考点的坐标,所有的基线便迎刃而解.然后将其应用到去平和差分过程中去[参见式(4)~(6)].表1列出了本文中用到的所有配对图象间的轨道号、接收日期及基线分布.表中只给出了图象开始部分两端(near range and far range )的垂直基线.表1 干涉配对图象数据一揽轨道号接收日期轨道方向基线分布/m9192,66872003212203,2003206211降轨484.09~468.5810194,96932004202211,2004201207降轨-540.59~-508.319192,101942003212203,2004202211降轨 3.08~3.3910459,89562004202229,2003211216升轨-13.56~-20.722.3 干涉图与高程模型图2a 是巴姆地区的ENV I 2S AT 雷达强度图象(雷达坐标),覆盖面积为42km ×42k m.巴姆城位于图象的中央偏左上方.图2b 和图2c 是两张去平以后的干涉图,分别用地震前的两幅图9192,6687和地震后的两幅图10194,9693干涉而成.它们反映了巴姆地区地震前后的地形.每一条干涉条纹表示2π的相位变化或分别表示大约17m 和19m 的高程变化.图3a,b 是图2b,c 的积分(即解缠)(Costantini,1996),它们表达了累计的相位变化,也就是实际地形的一种标度.图3c 是图3a 和图3b 的差分.在做差分时,没有必要将相位转换成高程,见式(8).差分的结果是十分均匀的,说明在地震前后的各自时间段内的地形没有变化,图3a 和图3b都可以作为高程模型使用.差分结果的均匀性还证明了图2b,c 的积分没有误差,基线估计也是正确的.在图3中,为了增加一些相对位置的信息,相位的值用颜色度表示,但强度和饱和度分别用雷达强度和地震前后的相关值进行了调制.图2 (a )雷达强度图;(b )震前干涉图(2003年12月3日,2003年6月11日);(c )震后干涉图(2004年2月11日,2004年1月7日)2.4 差分干涉与形变场地震前后各取一张雷达图进行干涉并去平后,得到的干涉图除了包含地形信息外,还应包含有地震引起的地表的形变.将降轨雷达图9192和10194配对干涉,时间段是2003年12月3日和2004年2月11日,再对图3a 进行差分,即减去地形的相位.图4a 即是其差分的结果.该结果已做了地理位置校正(geocoding ).图4a 中,地形全减掉了,只剩下形变引起的相位变化.一个颜色周期仍表示2π的相位变化,但这时反映的是大小为半个波长的形变,即2.8c m [式(8)].该形变主要发生在巴姆城内及其周围25km 的范围内.前已述及,雷达干涉测量到的形变只是真实形变在雷达射线上的投影.对E NV I S AT 降轨图象和巴姆地区来说,雷达射线的方向余弦是-0.066,0.384和0.920.形变场只可见4个梅花瓣的一半,即东边南北两个.南边的一瓣在雷达射线方向上隆起30c m ,北边的下沉624 地 震 学 报 27卷图3 (a )震前地形图;(b )震后地形图;(c )图(a )与图(b )的差分图4 (a )降轨形变图(2003年12月3日,2004年2月11日);(b )升轨形变图(2004年2月29日,2003年11月16日);(c )同震形变场(降轨);(d )同震形变场(升轨)18c m.图4b 是用升轨数据(10459,8956)得到的形变场,投影在方向余弦为-0.057,-0.332和0.942的雷达射线上.图4b 中可见3个形变花瓣,只是量小多了.西北瓣隆起12c m ,东北瓣下沉6c m ,东南瓣隆起18c m ,西南边的那一瓣因位置不在此升轨图象中,故只见一个很小的外围弧段,但可看出是下沉的.由形变梅花瓣隆起与下沉的分布推断,断层应是南北走向,断层东边的板块向南搓动,而西边的板块向北.断层似乎应由若干段构成.巴姆地震形变的主要成份南北相对位移矢量与雷达射线在空间几乎垂直(99.8°),导致它在图4a,b 中的贡献甚微.图4c,d 分别是图4a,b 的积分,即形变场,并724 4期 夏 耶:巴姆地震地表形变的差分雷达干涉测量已标定了其地理坐标.可见该形变主要在巴姆城附近,其25k m 以外已经基本削弱到0了.3 断层位置和形状的确定巴姆地震是由于断层的破裂引起的.如果地面上也出现了裂缝,裂缝本身是一种破坏,其周边的近临点的相对位移量应是最大.因此,可通过检测此裂缝来估计断层的位置和形状.第一种方法是比较震前、震后和地震前后3张雷达相干图.断层应只出现在地震前后相干图中.因篇幅有限,这里只给出了地震前后相干图,并用于图3和图4对颜色的调制中.在这些图中,巴姆城北边和南边的黑线条即是新的裂缝.在震前、震后的相干图以及雷达强度图中,这两条黑线是不存在的.在巴姆城内,因相关值太低,无法检测此裂图5 检测出的断层裂缝缝在城内的走向.但可以肯定的是,新破裂的断层正好位于巴姆城地下.第二种方法是用图象棱边滤波器(edge detec 2ti on filter )对形变场滤波.图5是滤波器的输出,断层的位置和形状十分清楚地突现出来.可见它粗略地由3段组成:南段、北段和中间段.中间段在巴姆城中,是杂乱无序的.北段的端点位置是58°21′57.68″E ,29°11′36.00″N 和58°22′10.29″E ,29°7′36.78″N ,长约6km;南段的端点位置是58°20′19.91″E ,29°4′57.30″N 和58°20′45.14″E ,28.58′27.46″N ,长约13k m.在巴姆城地下的中间段可想象成北段南端与南段北端的联结线,长约5km.图6 理论模型模拟的结果.(a )降轨;(b )升轨(W ang,2004)824 地 震 学 报 27卷4 震源理论模型的参数估计合成孔径雷达干涉测量得到的形变场和断层位置的形状及构成的数据,可帮助地球物理学家深化他们的震源理论模型的研究和模拟.德国波茨坦地球科学研究中心汪荣江(W ang,2004)博士用日本庆应大学冈田光弘(Okada,1985)教授提供的弹性半空间形变理论模型和本文提供的形变场(包括升轨和降轨)和断层的测量数据,借助一个二维正交傅里叶级数,用最小二乘法对形变理论模型的参数进行了估计.图6a,b 是用理论模型和估计出的参数反演出来的分别对应于降轨和升轨的地壳形变场.将图4a,b 分别与图6a,b 比较,可以说它们非常一致,方差在2c m 左右,较大差异只在断层附近,且只有几厘米.可能因理论模型及参数尚不能完全反映断层的微细结构的缘故.参考巴姆地区地质图,可知北段断层与老断层(巴姆断层)重合,但它没有像老断层那样向东南延伸,而是拐向西南,穿过巴姆城,再向南延伸,形成全新的南段断层,与原巴姆断层几乎平行且相距大约5k m.汪荣江(W ang,2004)的模拟结果表明,北、中、南3块断层面的长度和走向分别是7k m ,0°;5k m ,35°;14k m ,357°.北段断层朝西倾斜55°,滑移分量很小,在20~70c m 范围内;而中段和南段断层向东倾斜近80°,南段滑移分量为1~2m ,最大达2.75m.中段是过度带.可见80%以上的地震能量是在南段释放的,震源应在南段断层上.这也是巴姆城遭到毁灭性破坏的主要原因之一.5 结论本文简要地介绍了合成孔径雷达的成像和干涉的基本原理,给出了用ENV I S AT 卫星雷达数据进行巴姆地震形变场测量的干涉处理过程及结果,证明了星载合成孔径雷达干涉技术是大地形变测量和地震研究的一个十分强大和有效的工具.本文同时用升轨和降轨干涉结果作为形变理论模型参数估计数据源.因估计结果是不唯一的,多一个独立数据源等于多加了一个限制条件.但这样做的话,对干涉结果的准确性则提出了更高的要求.从升轨和降轨干涉结果来看,远场的形变都基本为0,近场和远场的形变模型参数估计残差非常小,在断层附近也就几厘米.这证明本文中涉及的雷达干涉信号处理过程是优秀的.如果干涉结果不准确,用升轨和降轨干涉结果同作为形变理论模型参数估计数据源将导致形变模型参数估计残差显著增大.在本文中,用梯度滤波器和解缠后的差分相位精确地确定了引起这次地震的新老断层的结构、大小及位置.这对形变理论模型参数估计至关重要.Talebian 等(2004)没有把这个断层估计好,为了减小参数估计残差,毫无道理地增加另一条断层,并断言,不增加另一条断层,则模型参数估计不好,更谈不上同时使用升轨和降轨干涉结果作为形变理论模型参数估计数据源.本文的结果证明他们的观点是不对的.利用干涉雷达进行大面积、快速度、低成本、高精度高分辨率的形变测量,是其它传统方法,包括现代的GPS 都无法做到的.现在合成孔径雷达干涉技术的主要缺陷有3点:一是有些地区雷达信号的相干性很差,以至无法进行干涉;其二是在数据量少的情况下,大气影响难于去除;第三是干涉结果只是形变投影到雷达射线上的结果,单靠雷达干涉技术本身,不能确定真实的形变矢量.随着雷达技术的进步,这些缺陷会逐步得到解决.例如,多波段,长波长及借助其它技术(Ferretti et al,2001;Xia,et al,2002)可解决部分地区的不相干和大气的问题;多卫星、多轨道和双侧视可解决确定真实的形变矢量的问题.924 4期 夏 耶:巴姆地震地表形变的差分雷达干涉测量034 地 震 学 报 27卷2006年德国将发射一颗X波段的雷达卫星(TerraS AR2X).随后德国和欧洲航天局还将发射Tande m TerraS AR2X及P波段的雷达卫星(TerraS AR2P).可以预见,合成孔径雷达干涉技术将会迎来一个新的研究和应用的高潮.参 考 文 献Costantini M.1996.A phase unwrapp ing method based on net w ork p r ogra mm ing[A].I n:ES A eds.Proceedings of the“Fringe′96″W orkshop,EAS SP2406[C].Zürich,S witzerland,261~272Curlander J C.1982.Locati on of s paceborne S AR i m agery[J].IEEE Trans Geosci and R e m ote Sensing,20(3):359~364 Curlander J C,Mc Donough R N.1991.Synthetic A perture Radar[M].New York:John W iley&Sons I nc.,28Ferretti A,Prati C,Rocca F.2001.Per manent scatteres I nS AR interfer ometry[J].IEEE,39:8~20Okada Y.1985.Surface defor mati on due t o shear and tensile faults in a half2s pace[J].B ull Seis m Soc Am er,74(4):1135~1 154Reigber Ch,Xia Y,Kauf mann H,et al.1996.I m pact of p recise orbits on S AR interfer ometry[A].I n:ES A eds.Proc.ESA2F ringe W orkshop on Applications of ERS SAR Interfero m etry,ESA SP2406[C].Zürich,S witzerland,223~232,htt p://www.geo.unizh.ch/rsl/fringe96Tabebian M,Fielding E,Funning G,et al.2004.The2003Ba m(Iran)earthquake:Rup ture of a bind strike2sli p fault[J].Geophys R es L ett,31:L11611,doi:10.1029/2004G L020058W ang R,Xia Y,Gr osser H,et al.2004.The2003Ba m(SE Iran)earthquake:p recise s ource parameters fr om satellite radar in2 terfer J].Geophys J Int,159:917~922Xia Y,Kauf mann H,Guo X F.2002.D ifferential S AR interfer ometry using corner reflect ors[A].I n:I EEE ed.Proc I G ARSS′02[C].Hoes Lane:I EEE I nc,1243~1246BA M EARTHQUAKE:SURFACE D EFO R M AT I O N M EA2 SURE M ENT US I NG RADAR I NTERFEROM ETRYXia Ye(GeoForschungsZentrum Potsdam,D214473Potsdam,Ger m any)Abstract:This paper described the app licati on of differential synthetic aperture radar interfer ome2 try(D2I N S AR)and Envisat AS AR data t o map the coseis m ic surface defor mati on caused by the M W=6.5Ba m earthquake on26th Dece mber2003including the interfer ometric data p r ocessing and results in detail.Based on the difference in the coherence i m ages bef ore and after the event and edge search of the def or mati on field,a ne w fault rup tured on the surface was detected and used as a data s ource for para meter extracti on of a theoretical seis m ic modeling.The si m ulated de2 for mati on field fr om the model perfectly coincides with the result derived fr om the S AR interfer o2 metric measure ment.Key words:m icr owave re mote sensing;S AR interfer ometry;earthquake;def or mati on measure2 ment作者简介李文军 中国地震局地球物理研究所博士研究生.1991年中国地质大学(武汉)地质学专业毕业,获学士学位;1999年中国地震局地质研究所固体地球物理专业毕业,获硕士学位.曾从事矿产资源普查与勘探、瞬变电磁法研究和应用工作.现从事数字地震学研究工作.何小波 中国科学院研究生院博士研究生.2002年中国矿业大学物探专业毕业,获学士学位.主要从事通过地震波形分析了解地壳上地幔结构方面的研究.中国地球物理学会会员.敬少群 湖南省地震局高级工程师.1987年云南大学地球物理系地球物理专业毕业,获学士学位;2001年中国科学技术大学地球和空间科学学院毕业,获硕士学位.主要从事地震活动性及地震前兆的观测研究工作.中国地震学会会员.刘根友 中国科学院测量与地球物理研究所副研究员.1987年武汉测绘科技大学大地测量系毕业,获学士学位;2004年中国科学院测量与地球物理研究所获博士学位.主要从事GPS 、地壳形变、地球重力学及数据处理工作.中国地震学会形变测量专业委员会委员.夏 耶 德国波茨坦地球科学研究中心研究员.1968年上海交通大学电机工程系毕业;1982年湖南大学电气工程系研究生毕业,获硕士学位;1995年在德国斯图加特大学导航研究所获博士学位.现在的研究方向主要是合成孔径雷达干涉技术理论及其在地形测绘和地质灾害监测中的应用.詹 艳 中国地震局地质研究所副研究员,在职博士研究生.1989年7月成都地质学院应用地球物理系毕业,获学士学位.主要从事电磁方法理论与应用研究工作.裴正林 石油大学CNPC 物探重点实验室研究员.1984年西安地质学院(现长安大学)勘探地球物理专业毕业,获学士学位;2000年中国地质大学(北京)获工学博士学位;2003年石油大学(北京)博士后出站.主要从事井间地震层析成像,地震波传播理论及其数值模拟方法,以及小波变换应用研究.中国地球物理学会会员.郭梦秋 云南省地震局防灾研究所.2001年云南大学地球科学系毕业;2004年中国地震局兰州地震研究所固体地球物理专业硕士研究生毕业.主要从事工程地震研究.注:马宏生、傅征祥、黄玮琼、边银菊、陈顺云等的简介分别见本刊:Vol .24,No .6;Vol .13,No .2;Vol .11,No .4;Vol .24,No .5;Vol .24,No .6.Ⅰ。
研究生课程论文学院建筑专业地理信息系统课程名称遥感技术与应用研究生姓名彭强学号 12011001011开课时间 2013 至 2014 学年第 1 学期第一章概论1.1 引言合成孔径雷达干涉(Synthetic Aperture Radar Interferometry,简称InSAR)是新近发展起来的空间遥感技术,它是传统的SAR遥感技术与射电天文干涉技术相结合的产物。
雷达遥感经历了数十年的蓬勃发展,到了20世纪90年代已经成为空间对地观测技术的研究热点。
合成孔径雷达技术最先应用的物理学基础是托马斯.杨提出的双缝干涉原理,利用几何原理进行空中三角形解算,最终可以求得地表各点的高程。
SAR是20世纪50年代末研制成功的一种微波传感器,也是微波传感器中发展最为迅速和最有成效的传感器之一。
如何利用SAR数据提取目标的高程信息是SAR的重要应用之一。
INSAR技术与立体成像技术最大的查遍在于,SAR影像对之间的‘视差’是通过干涉信号之间的相位差得到的,这些相位差可用于确定目标物相对干涉SAR基线的角度。
通过所得到的单视复影像进行干涉,我们叫做D-INSAR,D-INSAR对于地表监测可以达到毫米级的精度,由于D-INSAR的这一特性,使得D-INSAR成为了变形监测的一个新的发展方向。
目前对合成孔径雷达干涉的研究机构很多,比如美国JPL单位,以Zebker等人为代表,他们主要研究机载和星载InSAR;在加拿大这项工作主要由CCRS承担,几年前主要集中在机载雷达系统方面,近几年来,加拿大成功地发射了RADARSAT之后,他们开始涉足卫星系统,此外,加拿大Atlantis最近研制了INSARWork-station软件,引起了同行的广泛重视;欧洲也有一些著名的InSAR研究中心,如德国的Hartl小组和意大利Prati研究组等[张景发,1998] 。
此外还有德国的地学研究中心(GFZ),欧空局的InSAR研究小组,英国的NPA,荷兰DELF 大学的InSAR研究机构等都做出了引人注目的成果。
【李陶】1.2星载合成孔径雷达卫星(SAR)技术的历史SAR方面的研究已经有五十多年的历史。
20世纪50年代,美国军队开始装备SAR,后来,美国航空航天局(NASA)和密执安环境研究所(ERIM)将SAR转化为民用。
由于很短的天线就能获取高分辨率影像,SAR才终于用到了航天器上。
最初的SAR应用在北美、巴西、哥伦比亚和巴拿马,并取得了很多成果,表明SAR获取信息的全天候、全天时特点,让红外和可见光摄影技术大为逊色。
由于SAR对地面坡度、目标表面形态敏感,可以从坡度估计转而用于估计目标点高程,进一步扩宽SAR的应用范围。
随着SAR技术的发展,它广泛应用于水利、农业、海洋、地质和环境等方面的工作、工程中。
干涉测量技术则是SAR应用中较晚出现的一个方向,或者说一个新的应用领域。
【舒宁】进入80年代后,美国航空航天局开始有计划地对SAR在航天高度进行试验与应用。
1981年11月哥伦比亚号航天飞机上搭载了成像雷达SIR-A,这是一种L波段的SAR,根据它所获得的图像探测到埃及及西北部沙漠地区的地下古河床,这一成果引起了国际科技界的震动。
1983年原苏联利用COSMOS雷达卫星进行海洋测绘,同时利用Verena-15和Verana-16宇宙飞船对金星进行雷达测绘。
2000年2月美国‘奋进号’航天飞机成功完成了地球测绘任务(SRTM)。
由于SRTM同时拥有C波段和X波段INSAR系统,因此SRTM能够利用干涉相干与频率之间相关联的特性,以及不同频率电磁波具有不同的穿透特性,来提高所提取的DEM精度,并获取散射过程的物理信息,对植被地区的研究极为有利。
【李平湘】总之80年代以后各国的各项关于SAR的研究,大大地促进了SAR技术的发展,使得INSAR和D-INSAR 技术逐渐趋于成熟。
进入新世纪以来,世界各国都在加紧筹划和研制新的可进行长期观测的各种先进的空间雷达。
欧洲空间局于2002年3月发射成功的环境卫星Envisat上搭载的先进合成孔径雷达系统,为c波段、多极化、多模式、采用分布式T/R组件及相控阵技术,是到目前为止最先进的星载SAR系统。
加拿大正在研制的Radarsat—2是Radarsar—1的改进型,它拟采用波导天线实现多极化。
美国下一个计划是使用SIR-D,它将是多频段(可能有4个)、多极化的星载成像雷达,为21世纪的长期地球观测系统(EOS)计划作技术准备。
中国自20实际70年代末研制出合成孔径雷达,后又研制出微波辐射计、高度计、散射计、和微波扫描仪,在机载微波遥感、成像机理和应用研究方面做了大量的工作,雷达干涉测量是近几年的事,在测绘、地质、环境监测等方面的应用研究也取得了进展,但是与北美、欧洲国家相比,还是有很大的差距,需要加强INSAR的研究。
总之由于D-INSAR和INSAR 对于地表监测的灵敏性和高精度,使得各国政府对于SAR方面的研究高度重视,中国在新世纪对于SAR研究方面有很多的举措,在未来几年间发射星载SAR卫星已经纳入中国第十二个五年的计划。
1.3合成孔径雷达(SAR)技术前沿合成孔径雷达(SAR)是近几年高速发展起来的高新技术,它是使用雷达信号的相位信息提取地球表面三维信息。
主要用于测量地面点的高程及其动态变化的测量。
INSAR技术能全天候、全天时获取大面积地面精确三维信息,空间分辨率高,基本不受气候条件的影像。
合成孔径差分干涉雷达(D-INSAR)是一种目前较新的地面变形观测方法,它是INSAR (合成孔径雷达干涉测量)技术的重要方面。
作为一种微波遥感的主要应用,INSAR技术通过卫星有源系统直接从空中对地面进行观测,不受时间和天气状况的限制,所得到数据具有较高的可靠性。
经过INSAR技术的处理,不但可以得到全球mm级精度的DEM,而且还可以获取反应地表在一定时间段内的卫校变化信息。
D-INSAR得到的地面变形观测结果在空间延续性上要远远优于GPS观测。
1993年Goldstein等人利用INSAR技术在极地可区分浮冰和固定冰区进行了冰雪监测,得出了南极地区地下冰河流动的速度以及南极冰盖随着季节变化的可靠规律,是INSAR 应用的冰雪观测的较为成功的例子。
1995年Massonnet 和Z.Lu等对埃特纳火山的INSAR和D-INSAR方面的研究,验证了火山的膨胀和紧缩与火山爆发的机理,得到的形变量与传统测量方法得到的形变量惊人相似,为人类探索火山的爆发机理做出了巨大贡献。
2009年R.J.Walters 对意大利中部的拉奎拉地震利用了D-INSAR技术中的二轨道观测技术进行地震形变的监测,得到了震后和同震地表形变变化规律,与传统测量所得结果吻合。
此例的成功证明了D-INSAR技术相对于传统测量方法的优越性。
与此同时,国内关于武汉大学和香港理工大学合作的关于汶川地震的D-INSAR监测,以及张红、王超等国内INSAR方面学者对于张北地震的D-INSAR监测和Zhenghong Li 在青海玉树成功运用D-INSAR技术进行了监测。
1.4 合成孔径雷达差分干涉技术(D-INSAR)合成孔径雷达差分干涉技术(D-INSAR)是对INSAR技术的一个拓展,INSAR技术仅能够达到10到20米的分辨率,无法对微笑的形变进行监测,然而通过几组数据对进行交叠干涉却能够将精度提高到毫米级,这样才逐渐的形成了D-INSAR技术的理论基础,经过这些年的发展D-INSAR技术逐渐走向成熟,甚至已经发展到PS-INSAR和SMAS等等新兴技术和方法的层面。
D-INSAR通过两幅天线同时观测(单轨模式),或两次近平行的观测(重复轨道模式),获取地面同意景观的复图像对。
由于目标和两天线位置的几何关系,在复图像上产生了相位差,形成了干涉纹图,干涉纹图中包含了斜距向上的点与两天线位置之差的精确信息,这种差值包含大气延迟影响、平地效应、地形起伏、噪声以及两次成像过程中地表发生的细微变化,由于SAR上两天线距离较短,利用差分的方法,可以消除两个天线接收信号中的共同误差,如卫星轨道误差、大气影响等。
因此可以有效地提高观测的精度。
根据获取数字地面模型(DEM)的不同,D-INSAR技术可以分为二轨法和三轨法,前者是利用事先获取的DEM 模拟干涉文图,从整体干涉图中减去这部分信息就得到地面变化信息;后者利用三幅影像生成两幅干涉图,其中一幅干涉图是地表变化前产生的,主要获取地形信息,另外一幅干涉图是由两个跨越形变的SAR影像生成,包含了形变信息。
这样通过去除地形信息就可以得到形变信息了,从而可以达到利用D-INSAR进行地表形变监测的目的。
第二章INSAR原理及D-INSAR原理概述2.1 INSAR原理概述由SAR的信号获取原理可以知道,雷达天线向飞行平台一侧发射雷达波,遇地物后其后向散射分量形成回波,天线接收后按时间先后记录下回波强度,不同强度大小形成SAR 影像上的不同亮度。
其距离向的影像分辨率与脉冲长度有关,而方位向的分辨率则通过记录同一目标回波的相位史及进一步的数据处理得以提高。
所以SAR的成像过程包含了信号的振幅和相位信息的处理,相位信息是距离的函数,雷达干涉测量正是利用了相位信息才得以实施,而要更好地利用相位信息,也离不开对振幅信号的分析,通过影像获取目标的高程信息,必须采取立体摄影的方式,对于SAR影像而言,需要得到同一地域的两幅SAR影像,雷达干涉测量也是由两个“观测”点上对目标进行观测才能进行的,这两个观测点就是两个天线位置,如下图所示:可以 解算以上的空中三角形,目标的高程计算式子如下:()cos ...........................(211)Z y H ρθ=---由于222()2sin()........................(212)B B ρδρρραθ+=++---从中得出:222()sin()........................(213)2B Bρδρραθρ+---=-- 最终可以得出相位的关系如下:2.2................(214)t δρπδρϕπλλ==-- INSAR 观测一般有三种工作方式或工作模式,即距离向干涉测量(Across-track Interferometry )、方位向干涉测量(Along-track Interferometry )和重轨干涉测量(Repeat-pass Interferometry )。
而一般在星载INSAR 中都利用重轨干涉测量。
2.2 D-INSAR 原理概述D-INSAR 技术是INSAR 技术的延伸,需要两个单复视影像和外部DEM (二轨)或者是三个单复视影像甚至多个单复视影像来进行干涉处理。