合成孔径雷达差分干涉测量
- 格式:ppt
- 大小:2.21 MB
- 文档页数:18
合成孔径雷达⼲涉测量概述合成孔径雷达⼲涉测量(InSAR)简述摘要:本⽂主要介绍了合成孔径雷达⼲涉测量技术的发展简史、基本原理、及其3种基本模式,并且对其数据处理的基本步骤进⾏了概述。
最后,还讲述合成孔径雷达⼲涉测量的主要应⽤,并对其未来发展进⾏了展望。
关键字:合成孔径雷达合成孔径雷达⼲涉测量微波遥感影像1.发展简史合成孔径雷达(Synthetic Aperture Radar,SAR)是⼀种⾼分辨率的⼆维成像雷达。
它作为⼀种全新的对地观测技术,近20年来获得了巨⼤的发展,现已逐渐成为⼀种不可缺少的遥感⼿段。
与传统的可见光、红外遥感技术相⽐,SAR 具有许多优越性,它属于微波遥感的范畴,可以穿透云层和甚⾄在⼀定程度上穿透⾬区,⽽且具有不依赖于太阳作为照射源的特点,使其具有全天候、全天时的观测能⼒,这是其它任何遥感⼿段所不能⽐拟的;微波遥感还能在⼀定程度上穿透植被,可以提供可见光、红外遥感所得不到的某些新信息。
随着SAR 遥感技术的不断发展与完善,它已经被成功应⽤于地质、⽔⽂、海洋、测绘、环境监测、农业、林业、⽓象、军事等领域。
L. C. Graham 于1974 年最先提出了合成孔径雷达⼲涉测量(InSAR )三维成像的概念,并⽤于⾦星测量和⽉球观察。
后来Zebker、G. Fornaro及A. Pepe 等做出了进⼀步的研究,以解决InSAR 处理系统中有关基线估计、SAR 图像配准、相位解缠及DEM ⽣成等⽅⾯的问题。
⾃1991 年7 ⽉欧空局发射载有C 波段SAR 的卫星ERS- 1 以来,极⼤地促进了有关星载SAR 的InSAR 技术研究与应⽤。
由于有了优质易得的InSAR 数据源,⼤批欧洲研究者加⼊到这个领域,亚洲(主要是⽇本)的⼀些研究者也开展了这⽅⾯的研究。
⽇本于1992 年2 ⽉发射了JERS- 1,加拿⼤于1995 年初发射了RADARSAT,特别是1995 年ERS- 2 发射后,ERS- 1 和ERS- 2 的串联运⾏极⼤地扩展了利⽤星载SAR ⼲涉的机会,为InSAR 技术的研究提供了数据保证。
dinsar概念
"DInSAR"是差分干涉合成孔径雷达(Differential Interferometric Synthetic Aperture Radar)的缩写。
它是一种利用合成孔径雷达(SAR)数据进行地表形变监测和测量的技术。
DInSAR技术基于雷达干涉原理,通过比较两个或多个不同时刻的SAR图像,利用相位差的变化来推断地表的形变情况。
具体来说,DInSAR技术使用两个或多个SAR图像的相干性信息,通过相位差的计算和分析,可以检测和测量地表的沉降、隆起、位移等形变现象。
DInSAR技术的关键是利用雷达波束的相干性来提取地表形变信息。
它可以应用于多个领域,如地质灾害监测、地下水抽采引起的地面沉降、地震活动引起的地表位移等。
DInSAR技术具有高精度、大范围、无需地面控制点等优点,因此在地表形变监测和地质灾害预警等方面具有广泛的应用前景。
需要注意的是,DInSAR技术的应用需要具备一定的雷达数据处理和解释能力,以及对地质地貌和形变机制的理解。
因此,它通常由专业的遥感和地球科学领域的研究人员和工程师来进行研究和应用。
遥感问答之SAR、InSAR、D-InSAR ⼩课堂在地质灾害监测相关场合中经常会出现“SAR”、“InSAR”、“D-InSAR”这些名词的⾝影,那么是如何⼯作的?针对这些问题,在什么是SAR? SAR有什么特征?InSAR、D-InSAR是如何⼯作的?究竟什么是这⾥和⼤家⼀起学习⼀下关于SAR的那些事。
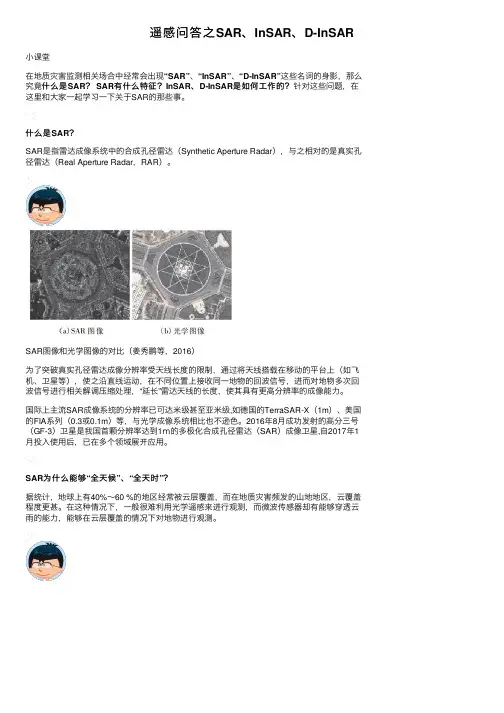
什么是SAR?SAR是指雷达成像系统中的合成孔径雷达(Synthetic Aperture Radar),与之相对的是真实孔径雷达(Real Aperture Radar,RAR)。
SAR图像和光学图像的对⽐(姜秀鹏等,2016)为了突破真实孔径雷达成像分辨率受天线长度的限制,通过将天线搭载在移动的平台上(如飞机、卫星等),使之沿直线运动,在不同位置上接收同⼀地物的回波信号,进⽽对地物多次回波信号进⾏相关解调压缩处理,“延长”雷达天线的长度,使其具有更⾼分辨率的成像能⼒。
国际上主流SAR成像系统的分辨率已可达⽶级甚⾄亚⽶级,如德国的TerraSAR-X(1m)、美国的FIA系列(0.3或0.1m)等,与光学成像系统相⽐也不逊⾊。
2016年8⽉成功发射的⾼分三号(GF-3)卫星是我国⾸颗分辨率达到1m的多极化合成孔径雷达(SAR)成像卫星,⾃2017年1⽉投⼊使⽤后,已在多个领域展开应⽤。
SAR为什么能够“全天候”、“全天时”?据统计,地球上有40%~60 %的地区经常被云层覆盖,⽽在地质灾害频发的⼭地地区,云覆盖程度更甚。
在这种情况下,⼀般很难利⽤光学遥感来进⾏观测,⽽微波传感器却有能够穿透云⾬的能⼒,能够在云层覆盖的情况下对地物进⾏观测。
微波传感器(ASAR,灰⾊图)的云穿透效果,彩⾊底图底图为光学传感器(MERIS)(图源:Space in Images© ESA)根据传感器能够接受电磁波频率的不同,可将对地观测系统⼤致可分为两类,即光学遥感和微波遥感。
微波的波长处于1mm~1000 mm范围内,⾜够长的波长使其能够绕过云层的粒⼦结构进⾏传播,也就是“衍射现象”;波长⼤于3 cm的微波甚⾄可以在⼤⾬环境下传播。
DInSAR全称Differential Interferometric Synthetic Aperture Radar,合成孔径雷达差分干涉测量技术。
➢InSAR技术提取地表DEM,需要假设两次成像期间,地表没有发生变化,地物产生的随机相位也是不变的。
➢而DInSAR则是一种根据多期SAR数据,获取地表形变信息的方法之一。
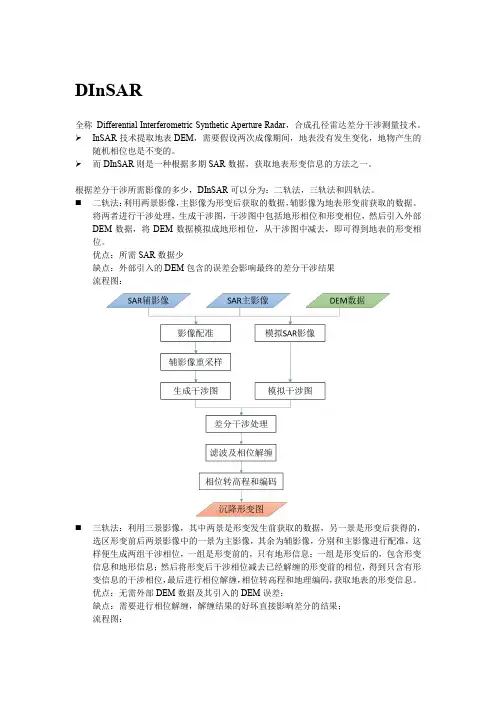
根据差分干涉所需影像的多少,DInSAR可以分为:二轨法,三轨法和四轨法。
⏹二轨法:利用两景影像,主影像为形变后获取的数据,辅影像为地表形变前获取的数据。
将两者进行干涉处理,生成干涉图,干涉图中包括地形相位和形变相位,然后引入外部DEM数据,将DEM数据模拟成地形相位,从干涉图中减去,即可得到地表的形变相位。
优点:所需SAR数据少缺点:外部引入的DEM包含的误差会影响最终的差分干涉结果流程图:⏹三轨法:利用三景影像,其中两景是形变发生前获取的数据,另一景是形变后获得的,选区形变前后两景影像中的一景为主影像,其余为辅影像,分别和主影像进行配准,这样便生成两组干涉相位,一组是形变前的,只有地形信息;一组是形变后的,包含形变信息和地形信息;然后将形变后干涉相位减去已经解缠的形变前的相位,得到只含有形变信息的干涉相位,最后进行相位解缠,相位转高程和地理编码,获取地表的形变信息。
优点:无需外部DEM数据及其引入的DEM误差;缺点:需要进行相位解缠,解缠结果的好坏直接影响差分的结果;流程图:四轨法:与二轨法类似,但是不需要外部引入的DEM数据,需要四景影像;基本思路是将形变发生前获取的两幅影像进行干涉处理,得到形变前的干涉相位,只包含地形信息;然后将形变后的两景影像进行干涉处理,得到形变后的干涉相位。
从形变后的干涉相位中减去形变前的干涉相位,得到地表的形变相位,然后相位解缠,得到差分干涉图。
流程图:InSAR获取DEM条件:两期影像获取期间地物没有明显的形变,且地物产生的随机相位是相同的;流程图:。
关于InSAR和D-InSAR的数据处理一、合成孔径雷达干涉技术(InSAR)合成孔径雷达干涉技术出现于20世纪60年代末.它是SAR与射电天文学干涉测量技术结合的产物。
当SAR扫过地面同一目标区域时,利用成像几何关系,通过成像、一些特殊的数据处理和几何转换,即可提取地表目标区域的高程信息和形变信息。
由于InSAR 技术有效利用了SAR的回波相位信息,测高精度为米级甚至亚米级,而一般雷达立体测量方法只利用灰度信息来实现三维制图,测高精度仅能达到数十米,因此该技术迅速引起了地学界及相关领域科研工作者的极大兴趣,现已成为微波遥感领域的研究热点.干涉合成孔径雷达利用多个接收天线观测得到的回波数据进行干涉处理,可以对地面的高程进行估计,对海流进行测高和测速,对地面运动目标进行检测和定位。
接收天线相位中心之间的连线称为基线,按照基线和航向的夹角,人们将InSAR分为基线垂直于航向的切轨迹干涉和沿航向的顺轨迹干涉。
切轨迹干涉可以快速提取地面的三维信息,顺轨迹干涉主要用于动目标检测和海洋水流与波形测量。
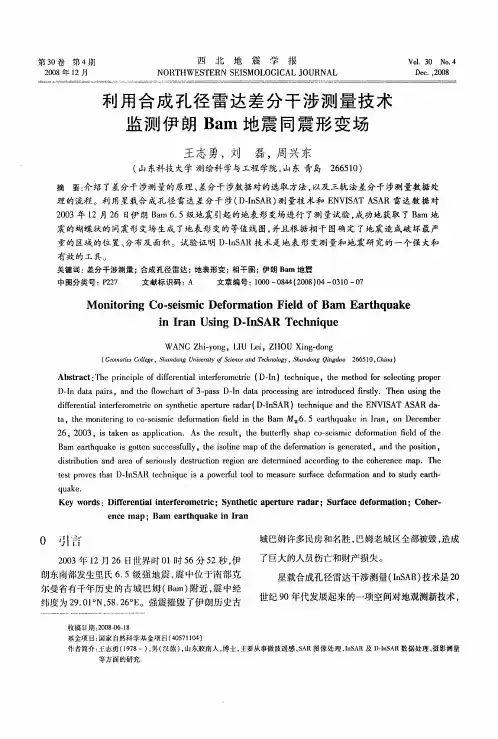
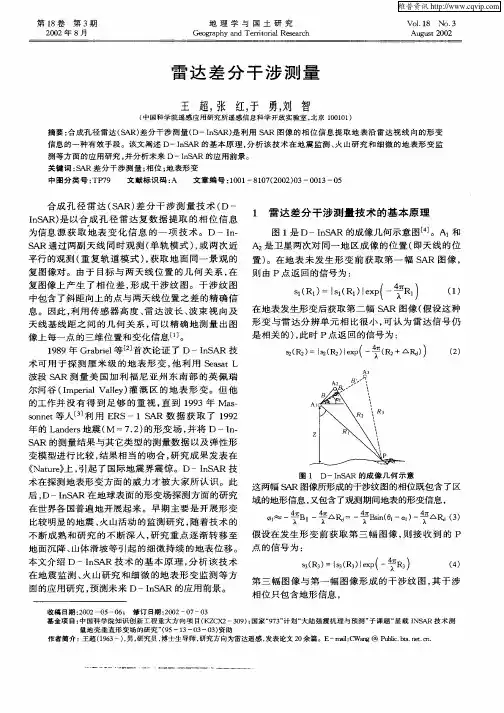
二、InSAR 基本原理InSAR 测量模式主要有两种:一种是双天线单轨(Single Pass)模式,主要用来生成数字高程模型,一般用于机载SAR;另一种是双轨(Two Pass) 模式,主要用于获取地表变形,一般用于星载SAR.下面以重复轨道干涉测量为例,简要介绍InSAR 技术的基本原理(见图1).假设卫星以一定的时间间隔和轨道偏离(通常为几十米到1km 左右)重复对某一区域成像,并在两次飞行过程中处于不同的空间位置1S 和2S ,则空间干涉基线向量为B,长度为B;基线向量B 与水平方向的夹角为基线倾角α。
1S 和2S 至地面点P 的斜距分别为R 和R+△R;将基线沿视线方向分解,得到平行于和垂直于视线向的分量||B 、'B ;H 为1S 到参考面的高度;从1S 发射波长为λ的信号经目标点P 反射后被1S 接收,得到测量相位1ϕ,114arg{}R u πϕλ=+(1)同样,另一空间位置2S 上测量到相位2ϕ,224()arg{}R R u πϕλ=+∆+(2)式中,arg{1u }和arg{2u }表示不同散射特性造成的随机相位.假设两幅图中随机相位的贡献相同,则1S 和2S 关于目标P 点的相位差124R πφϕϕλ=-=-∆(3) 也称为干涉相位,可由经过配准的两幅SAR SLC 图共扼相乘得到.根据图1中的几何关系并利用余弦定理可得: 222()sin()2R B R R RBθα+-+∆-=(4) cos h H R θ=-(5)由于R R ∆且R B ,则||sin()R B B θα∆≈-=(6) (4)、(5) 两式即为In SAR 确定高程的原理性公式.三、合成孔径雷达差分干涉测量(D-InSAR)D-InSAR 技术是在主动式微波合成孔径雷达 SAR 相干成像基础上发展起来的,它以合成孔径雷达复数据提供的相位信息为信息源,可从包含目标区域地形和形变等信息的一幅或多幅干涉纹图中提取地面目标的微小形变信息。
DInSAR全称Differential Interferometric Synthetic Aperture Radar,合成孔径雷达差分干涉测量技术。
➢InSAR技术提取地表DEM,需要假设两次成像期间,地表没有发生变化,地物产生的随机相位也是不变的。
➢而DInSAR则是一种根据多期SAR数据,获取地表形变信息的方法之一。
根据差分干涉所需影像的多少,DInSAR可以分为:二轨法,三轨法和四轨法。
⏹二轨法:利用两景影像,主影像为形变后获取的数据,辅影像为地表形变前获取的数据。
将两者进行干涉处理,生成干涉图,干涉图中包括地形相位和形变相位,然后引入外部DEM数据,将DEM数据模拟成地形相位,从干涉图中减去,即可得到地表的形变相位。
优点:所需SAR数据少缺点:外部引入的DEM包含的误差会影响最终的差分干涉结果流程图:⏹三轨法:利用三景影像,其中两景是形变发生前获取的数据,另一景是形变后获得的,选区形变前后两景影像中的一景为主影像,其余为辅影像,分别和主影像进行配准,这样便生成两组干涉相位,一组是形变前的,只有地形信息;一组是形变后的,包含形变信息和地形信息;然后将形变后干涉相位减去已经解缠的形变前的相位,得到只含有形变信息的干涉相位,最后进行相位解缠,相位转高程和地理编码,获取地表的形变信息。
优点:无需外部DEM数据及其引入的DEM误差;缺点:需要进行相位解缠,解缠结果的好坏直接影响差分的结果;流程图:四轨法:与二轨法类似,但是不需要外部引入的DEM数据,需要四景影像;基本思路是将形变发生前获取的两幅影像进行干涉处理,得到形变前的干涉相位,只包含地形信息;然后将形变后的两景影像进行干涉处理,得到形变后的干涉相位。
从形变后的干涉相位中减去形变前的干涉相位,得到地表的形变相位,然后相位解缠,得到差分干涉图。
流程图:InSAR获取DEM条件:两期影像获取期间地物没有明显的形变,且地物产生的随机相位是相同的;流程图:。

科技成果——矿山边坡合成孔径雷达监测预警系统技术开发单位中国安全生产科学研究院研发中心适用范围边坡合成孔径雷达监测预警系统(简称边坡雷达或S-SAR)基于地基合成孔径雷达差分干涉测量技术,能够对地表微小形变进行高精度测量。
该系统能够对露天矿边坡、排土场边坡、尾矿库坝坡、水电库岸和坝体边坡、山体滑坡、大型建筑物的形变、沉降等实施大范围连续监测,可广泛用于重要工程安全保障、健康评估和应急抢险,对各种坍塌灾害进行预警预报。
和传统的全站仪、GPS等监测手段相比,具有全天时、全天候、大范围区域、远程、高精度监测的技术优势,开创了全新的边坡位移形变监测方式,具有十分广阔的推广应用前景。
成果简介边坡雷达的基本原理是基于地基合成孔径雷达差分干涉测量技术。
通过地基合成孔径雷达技术,在距离向利用脉冲压缩实现高分辨率,在方位向通过波束锐化实现高分辨率,从而获取观测区域的二维高分辨率图像。
通过差分干涉测量技术,把同一目标区域、不同时间获取的二维高分辨率图像结合起来,利用各像素点的相位差反演获得被测区域的高精度形变信息。
再利用网络远程控制系统实现全天候自动监测,当边坡变形量和变形速率达到预警级别时,提前发出灾害预警。
关键技术关键技术一:高可靠自动化运行的高精度雷达系统技术。
采用双通道一次变频,减少中间环节的噪声影响;采用具有镜频抑制能力的混频方案,减少前端滤波环节,降低噪声系数;采用高稳定时基,优化本振设计,提高频谱纯度指标;使得雷达在实现大带宽的同时,将雷达长期幅相误差控制到0.3dB和1°以内,满足了亚毫米级形变监测要求,突破了高稳定的宽频带雷达收发测量这一技术难题。
相较于星载、机载雷达测绘应用,同时兼顾近、远距的边坡监测需要是边坡监测雷达需要进一步解决特殊问题,提高隔离度和接收灵敏度,提高相位的同步性和处理速度。
对运动控制系统、雷达系统及数据处理系统进行了高可靠集成,引入同步反馈控制机制,实现高精度运动系统和雷达系统的同步集成控制;通过系统微型化、模块化设计,提高边坡雷达系统的可靠性和易维修性;采用全封闭结构设计,增强了可靠性和环境适应性。
科技成果——露天煤矿边坡合成孔径雷达监测
预警系统
技术开发单位
中国安全生产科学研究院
适用范围
适用于我国露天煤矿采场边坡、排土场边坡的安全监测预警,采用合成孔径雷达监测技术,可对边坡进行大范围、远距离、高精度遥感监测,发现滑坡隐患,提前预警,不受边坡高度、地质条件变化等情况影响,不受雨、雾等恶劣天气干扰,能有效防范露天煤矿重大滑坡事故。
成果简介
(1)采用合成孔径雷达零基线差分干涉原理,监测边坡位移速度变化趋势,并据此触发滑坡预警;
(2)通过遥感非接触监测方式快速获取数据,最大监测距离5km,数据采集间隔短;
(3)具有高精度和高分辨率,精度0.1mm,距离向分辨率30cm,对边坡面域进行网格化,获取百万量级监测数据;
(4)满足IP65防护要求,实现全天时、全天候无人值守持续稳定监测;
(5)采用点和面相结合方式进行分级预警,滑坡预测准确率提高20%以上;
(6)融合全站仪、GNSS等多传感器数据,开发云平台系统,支
持远程专家会诊和实景三维展示,可自动生成变形曲线和数据报表。
应用情况
自2016年5月推广以来,在全国部署40余台设备,累积运行超过6万小时,已在神华准能集团黑岱沟露天煤矿、中煤平朔集团安家岭露天煤矿、广东省大宝山矿业有限公司露天矿、首钢矿业公司水厂铁矿、包钢集团白云鄂博铁矿等10多家露天矿山应用。
该系统为露天煤矿安全开采提供了技术支撑,提高开采效率,减轻露天煤矿边坡监测工作量,解放地测部门人力。
合成孔径雷达干涉测量(INSAR)技术原理及应用发展合成孔径雷达干涉测量(InSAR)技术近年来得到了较快的发展,这一技术也广泛的应用于国防建设与国民经济建设中。
文章结合作者实际研究,从InSAR 技术的自身优势与发展潜力出发,分析了其基本技术原理,并就InSAR技术在各个领域的实际应用进行了探讨,最后总结了其未来发展。
标签:合成孔径雷达;INSAR;技术原理;应用1 InSAR技术的优势与潜力合成孔径雷达干涉测量技术是近年来发展起来的空间对地观测新技术,这一技术主要是借助于合成孔径雷达SAR朝目标位置发射微波,之后接收目标反射回波,从而获得目标位置成像的SAR复图像对,如果复图像之间有相干条件,SAR复图像对共轭相乘后能够得到干涉图,结合干涉图相位值可以获得两次成像中存在的微波路程差,进而准确获得目标位置的地形地貌等情况。
利用InSAR技术成像的优势在于连续观测能力强、成像分辨率和精度高、覆盖范围较广、技术成本低等,在各个领域的应用也非常广泛,比如说DEM生成、地面沉降监测、火山或地震灾害监测、海洋测绘、国防军事等。
但是InSAR 技术测量的精准度往往会受到大气效应的影响,近年来新提出的散射体PS技术逐渐被越来越多的应用到其干涉处理的过程中,PS技术分析能够在长时间内保持相对稳定的散射体相位变化,即便是难以获得干涉条纹的状况下,也可以获得毫米级的测量精度,在很大程度上提高了干涉测量技术的环境适应能力,这也是这一技术研究过程中的一个重大突破,其拥有非常高的开发应用价值[1]。
2 InSAR技术的基本原理分析合成孔径雷达干涉测量技术是按照复雷达图像的相位值来计算出地面目标空间信息的技术,它的基本思想是:借助两幅天线进行同时成像或者单幅天线间隔一定时间重复成像,进而得到同一位置的复雷达图像对,因为两幅天线和地面目标之间的距离不一致,因此在复雷达图像对同名象点之间出现相位差,进而产生干涉纹图,其中的相位值代表两次成像的相位差测量值,两次成像的相位差和地面目标的空间位置之间的几何关系,结合飞行轨道的具体参数,便能够准确的计算出地面目标的具体坐标,进而让我们获得具有较强精准度的大范围数字高程模型。
ds-insar技术原理-回复DSINSAR技术原理是一种基于合成孔径雷达干涉测量的技术,用于地表形变的监测和测量。
DSINSAR是Differential Synthetic Aperture Radar Interferometry的缩写,中文译为差分合成孔径雷达干涉测量技术,它通过比较两次合成孔径雷达(SAR)图像的相位差异来计算地表的形变情况。
DSINSAR技术具有高分辨率、全天候、长期监测、无需人工采集数据等特点,广泛应用于地震监测、城市沉降、地质灾害等领域。
DSINSAR技术的原理可以分为以下几个关键步骤:数据采集、图像处理、干涉阶段、相位去除和形变分析。
首先是数据采集阶段。
DSINSAR技术使用合成孔径雷达原理,获取地表的微波图像数据。
合成孔径雷达是一种主动雷达系统,它通过发射和接收一系列的脉冲信号,并利用多普勒效应对返回的信号进行处理,得到地表的微波图像数据。
DSINSAR技术需要同时获取两次合适时间的SAR 图像数据,以便计算相位差异。
接着是图像处理阶段。
在这个阶段,需要对采集的SAR图像数据进行预处理,以确保数据质量。
常见的预处理包括幅度校正、几何校正等。
幅度校正可以消除地形、距离、传播路径等因素的影响,得到有效的幅度数据;几何校正可以将图像的坐标进行转换,以实现不同观测数据之间的配准。
然后是干涉阶段。
在干涉阶段,需要将两次采集的SAR图像进行干涉处理,计算得到相干图片。
干涉处理的基本思想是将两幅图像进行像素级别的比较,并计算相位差异。
SAR图像的相位包含了地表形变的信息,因此通过比较两次图像的相位差异,可以得到地表形变情况。
接下来是相位去除。
由于地球的大气条件以及其他因素的干扰,干涉相位会受到一些非地表形变的影响。
为了得到准确的形变信息,需要对相位进行去除。
常见的相位去除方法包括平滑滤波、多项式拟合等。
这些方法可以消除相位变化的非地表形变部分,保留地表形变信息。
最后是形变分析。
合成孔径雷达干涉测量及若干关键技术研究合成孔径雷达干涉测量及若干关键技术研究引言:合成孔径雷达干涉测量(InSAR)技术是一种通过对两幅或多幅雷达影像的干涉分析来获取地表形变和高程信息的遥感技术。
它利用雷达的发射和接收系统形成的合成孔径,通过比较不同时刻或不同视角的雷达图像,可以测量出地表的微小变化。
这项技术可广泛应用于环境监测、地质灾害预警等领域,具有广阔的应用前景。
本文将着重介绍合成孔径雷达干涉测量技术的原理以及相关的关键技术研究进展。
一、合成孔径雷达干涉测量原理合成孔径雷达干涉测量是通过对两幅或多幅雷达图像进行干涉分析来得到地表形变和高程信息的技术。
其原理主要包括以下几个方面:1. 合成孔径:合成孔径是通过雷达系统来形成的一种虚拟孔径,其大小远远大于实际的天线孔径。
通过合成孔径,可以提高雷达的方向性和分辨率。
2. 干涉分析:干涉分析是通过对不同时刻或不同视角的雷达图像进行相位差分析来得到地表形变和高程信息的算法。
当地表发生形变时,会导致相位改变,通过对两幅雷达图像的相位进行差分,可以得到地表形变信息。
3. 分析和解算:经过干涉分析后,得到的相位差图像需要进行进一步的分析和解算,才能得到可靠的地表形变和高程信息。
其中包括相位解缠、轨道参数精确校正、大气湿延伸校正等过程。
二、关键技术研究进展合成孔径雷达干涉测量是一项复杂的技术,需要借助多个关键技术的支持才能实现。
以下将介绍目前一些主要的关键技术研究进展:1. 相位解缠技术:相位解缠是解决差分相位包裹问题的关键技术。
相位包裹是指相位在空间上发生突变,导致相位差无法直接表示地表形变。
相位解缠技术通过利用多余的信息,将相位包裹进行去除,得到连续的相位图像,从而获得准确的形变信息。
2. 轨道参数精确校正技术:由于合成孔径雷达干涉测量需要对不同时刻或不同视角的雷达图像进行干涉分析,所以需要对雷达系统的轨道参数进行精确校正。
轨道参数精确校正技术可以通过星载GPS等方式获取高精度的轨道参数,从而提高干涉测量的精度。