自动控制原理第五章
- 格式:docx
- 大小:14.23 KB
- 文档页数:4
自动控制原理第五章为了实现各种复杂的控制任务,首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机的整体,这就是自动控制系统。
在自动控制系统中,被控对象的输出量即被控量是要求严格加以控制的物理量,它可以要求保持为某一恒定值,例如温度、压力或飞行轨迹等;而控制装置则是对被控对象施加控制作用的相关机构的总体,它可以采用不同的原理和方式对被控对象进行控制,但最基本的一种是基于反馈控制原理的反馈控制系统。
折叠反馈控制系统在反馈控制系统中,控制装置对被控装置施加的控制作用,是取自被控量的反馈信息,用来不断修正被控量和控制量之间的偏差从而实现对被控量进行控制的任务,这就是反馈控制的原理。
下面是一个标准的反馈模型:开方:公式:X(n+1)=Xn+(A/Xn^2-Xn)1/3设A=5,开3次方5介于1^3至2^3之间(1的3次方=1,2的3次方=8)X_0可以取1.1,1.2,1.3,1.4,1.5,1.6,1.7,1.8,1.9,2.0都可以。
例如我们取2.0。
按照公式:第一步:X1={2.0+[5/(2.0^2-2.0)]1/3=1.7}。
即5/2×2=1.25,1.25-2=-0.75,-0.75×1/3=-0.25,输入值大于输出值,负反馈2-0.25=1.75,取2位数字,即1.7。
第二步:X2={1.7+[5/(1.7^2-1.7)]1/3=1.71}.。
即5/1.7×1.7=1.73010,1.73-1.7=0.03,0.03×1/3=0.01,输入值小于输出值正反馈1.7+0.01=1.71。
取3位数字,比前面多取一位数字。
第三步:X3={1.71+[5/(1.71^2-1.71)]1/3=1.709} 输入值大于输出值,负反馈第四步:X4={1.709+[5/(1.709^2-1.709)]1/3=1.7099} 输入值小于输出值正反馈这种方法可以自动调节,第一步与第三步取值偏大,但是计算出来以后输出值会自动减小;第二步,第四步输入值偏小,输出值自动增大。

第五章§5-1 引言§5-2频率特性§5-3 开环系统的典型环节分解和开环频率特性曲线的绘制§5-4开环和闭环系统Bode图的绘制方法§5-5 系统稳定性分析§5-6控制系统的相对稳定性分析第五章 控制系统的频率响应分析[教学目的]:掌握利用频域法进行系统分析的一般方法 ,为后面的校正及信号与系统分析打下基础。
掌握系统频率特性分析与系统幅角之间的关系,掌握Nyquist 图和Bode 图的绘制方法,根据系统的Nyquist 图和Bode 图分析系统的性质。
本章的难点是Nyquist 稳定性分析。
[主要容]:一、引言 二、 频率特性 三、 开环系统的典型环节分解和开环频率特性曲线的绘制 四、 频率域稳定判据 五、 稳定裕度 六、 闭环系统的频域性能指标[重点]: 频率特性的基本概念,各种频域特性曲线的绘制,Nyquist 稳定判据的应用,及相对稳定裕度的分析,理解三频段的概念与作用。
[难点]:时域性能指标与频域性能指标之间的相互转换。
闭环频域性能指标的理解与应用[讲授方法及技巧]:联系传递函数,微分方程等数学模型,将频率法和时域分析法、根轨迹法相比较,理解和掌握古典控制系统的完整体系。
准确理解概念,把握各种图形表示法的相互联系。
与时域法进行对比,以加深理解。
§5-1 引言1.时域分析法(特点)1)以传递函数和单位阶跃响应为分析基础构成的一整套解析法为主响应曲线图形分析法为辅的分析方法。
它具有直观、明确的物理意义,但就是运算工作量较大,参数的全局特征不明显。
2) 原始依据--数学模型,得来不易,也同实际系统得真实情况有差异,存在较多的近似、假设和忽略,有时对于未知对象,还可能要用经验法估计。
3) 对工程中普遍存在的高频噪声干扰的研究无能为力。
4) 在定性分析上存在明显的不足。
5) 属于以“点”为工作方式的分析方法。
2.根轨迹法(特点)1)根轨迹法弥补了时域分析法中参数全局变化时特征不明显的不足,在研究单一指定参数对整个系统的影响时很有用;2)增加零极点(增加补偿器)时,是一种很好的辅助设计工具; 3)以“线”和“面”为工作方式;4)为定性分析提供了一种非常好的想象空间和辅助思维界面。
第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
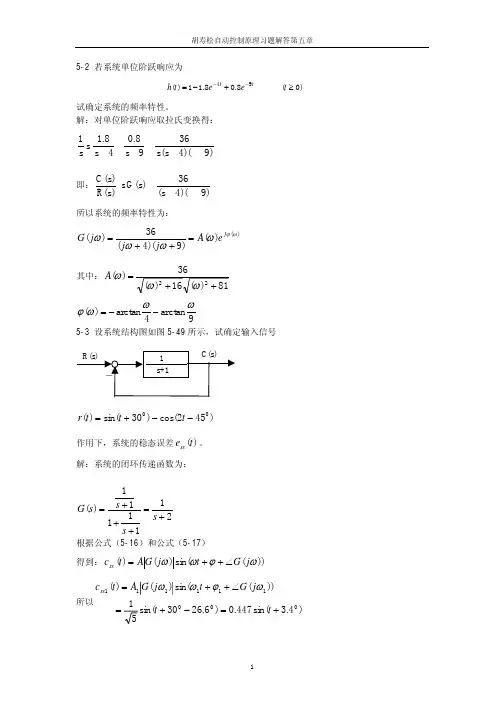
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n-+⋅⋅+⋅⋅⋅+=t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t稳态响应为:tj tj ss eA eA t y ωω⋅+⋅=-)(而)(21)()(22ωωωωωj G R jj s s R s G A m j s m -⋅-=+⋅+⋅⋅=-=)(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m tj m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即φωωj e j G j G )()(= φωωj e j G j G -=-)()(∴][)(21)()()(φωφωω+-+--⋅=t j t j mss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m =)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
其幅值是输入正弦信号幅值的)(ωj G 倍,其相移为)(ωφj G ∠=。
自动控制原理第五章
现代控制理论基础
20世纪50年代诞生,60年代发展。
标志和基础:状态空间法。
特点:揭示系统内部的关系和特性,研究和采用优良和复杂的控制方法。
适用范围:单变量系统,多变量系统,线性定常系统,线性时变系统,非线性系统。
状态:时间域中系统的运动信息。
状态变量:确定系统状态的一组独立(数目最少的)变量。
能完全确定系统运动状态而个数又最少的一组变量。
知道初始时刻一组状态变量的值及此后的输入变量,可以确定此后全部状态(或变量)的值。
n阶微分方程描述的n阶系统,状态变量的个数是n。
状态变量的选取不是唯一的。
状态向量:由n个状态变量组成的向量。
状态空间:以状态变量为坐标构成的n维空间。
状态方程:描述系统状态变量之间及其和输入之间的函数关系的一阶微分方程组。
输出方程:描述系统输出变量与状态变量(有时包括输入)之间的函数关系的代数方程。
状态空间表达式:状态方程与输出方程的组合。
线性定常系统状态空间表达式的建立
根据工作原理建立状态空间表达式
选择状态变量:与独立储能元件能量有关的变量,或试选与输出及其导数有关的变量,或任意n个相互独立的变量。
由微分方程和传递函数求状态空间表达式
1.方程不含输入的导数,传递函数无零点
2.方程含有输入的导数,传递函数有零点
根据传函实数极点建状态空间表达式
状态变量个数一定,选取方法很多,系数矩阵多样。
z=Px(│P│≠0)是状态向量。
│sI-A│:系统或矩阵的特征多项式。
│sI-A│=0:特征值或特征根,传递函数极点。
同一个系统特征值不变。
状态变量图包括积分器,加法器,比例器。
表示状态变量、输入、输出的关系。
n阶系统有n个积分器。
状态变量图↔状态空间表达式
李雅普诺夫稳定性
李雅普诺夫稳定性的定
线性系统的可控性与可观测性线性系统的可控性与可控性判据。