自动控制原理(梅晓榕)习题答案5
- 格式:doc
- 大小:2.72 MB
- 文档页数:12
第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
习题参考答案1-1工作原理当水位达到规定值时,浮子使电位器活动端处于零电位,放大器输出电压和电机电枢电压是零,电机停转,进水阀门开度不变。
水位高于规定值时,浮子使电位器活动端电位为正,放大器输出电压和电机电枢电压是正,电机正转,阀门开度减小,进水量减小,水位下降。
而水位低于规定值时,浮子使电位器活动端电位为负,电机反转,阀门开度变大,水位上升。
参考输入是电位器中的零电位,扰动量包括出水量和进水管压力的变化等,被控变量是水位,控制器是放大器,控制对象是水箱。
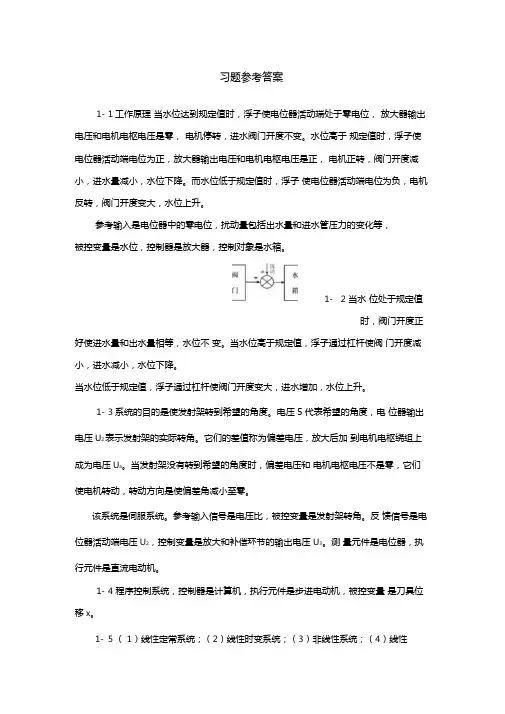
1- 2 当水位处于规定值时,阀门开度正好使进水量和出水量相等,水位不变。
当水位高于规定值,浮子通过杠杆使阀门开度减小,进水减小,水位下降。
当水位低于规定值,浮子通过杠杆使阀门开度变大,进水增加,水位上升。
1-3系统的目的是使发射架转到希望的角度。
电压 5代表希望的角度,电位器输出电压U2表示发射架的实际转角。
它们的差值称为偏差电压,放大后加到电机电枢绕组上成为电压U a。
当发射架没有转到希望的角度时,偏差电压和电机电枢电压不是零,它们使电机转动,转动方向是使偏差角减小至零。
该系统是伺服系统。
参考输入信号是电压比,被控变量是发射架转角。
反馈信号是电位器活动端电压U2,控制变量是放大和补偿环节的输出电压U3。
测量元件是电位器,执行元件是直流电动机。
1-4 程序控制系统,控制器是计算机,执行元件是步进电动机,被控变量是刀具位移x。
1-5 (1)线性定常系统;(2)线性时变系统;(3)非线性系统;(4)线性时变系统;(5)线性定常系统;(6)线性时变系统c )对X o 的引出点列方程。
k 1 (X iX o ) k 2X o f (X iX o )0 fX o(k 1k 2)x °权 KxX o (s) fs K2-1 a) m3 kx(t)dtF(t)X(s) F(s)1 ms2 kb )取m 的平衡点为位移零点,列微分方程。
2d x(t) m A dt 2f 警kX (t )卡⑴X(s) F(s)I 1/I 2ms 2 fs k2-2 设A B 点及位移X 见图中(b ),(d )-AA图机械系统a )对质量m 列方程。
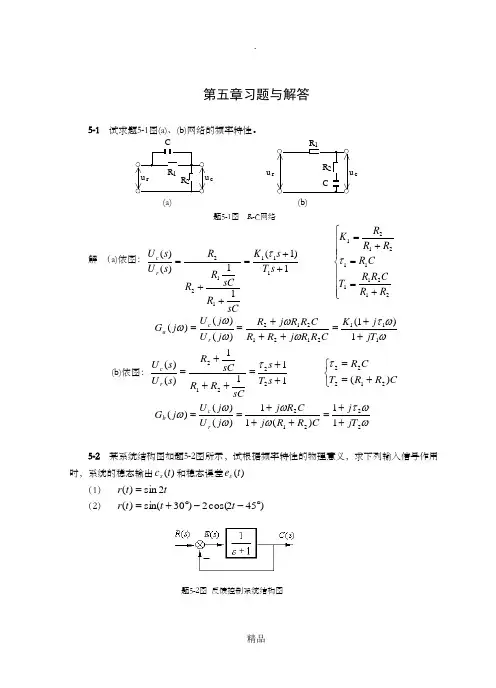
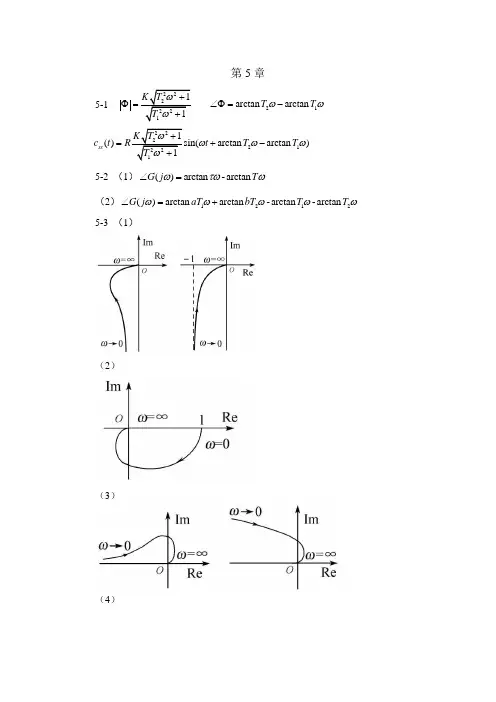
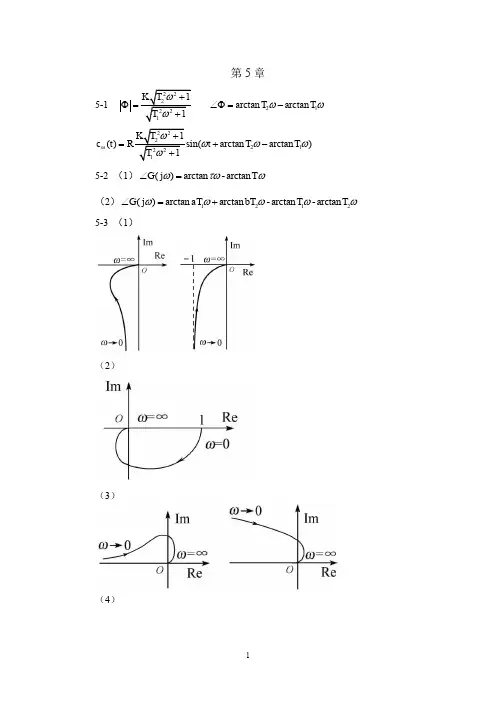
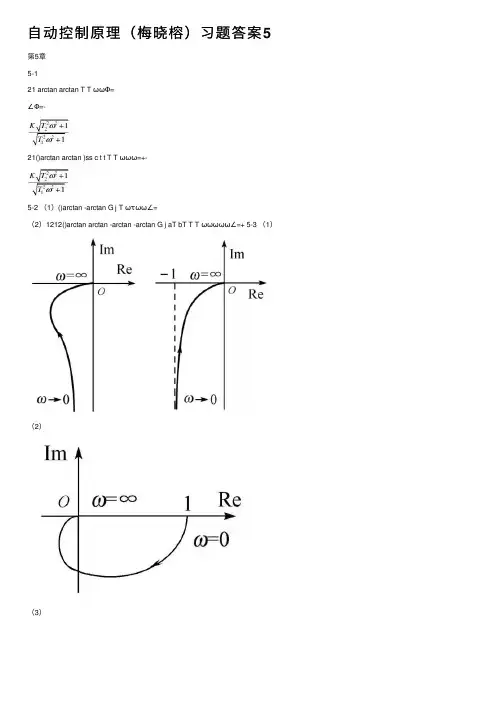
第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++==5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt ()..=-+≥--11808049试求系统频率特性。
第5章5-1 222212211 arctan arctan 1K T T T T ωωωω+Φ=∠Φ=-+222212211()sin(arctan arctan )1ss K T c t Rt T T T ωωωωω+=+-+5-2 (1)()arctan -arctan G j T ωτωω∠=(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)(2)(3)(4)(5)(6)(7)(8)5-4(1)(3)(4)(6)(7)(8)(1)(2)(3)(4)(6)(7)(8)(10)5-6 (a )12100()11(1)(1)G s s s ωω=++ (b )231221(1)()1(1)s G s s s ωωω+=+(c )112211()11c s G s s s ωωωω⎛⎫+⎪⎝⎭=⎛⎫+ ⎪⎝⎭(d )123()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定(e )不稳定 (f )不稳定 (g )不稳定 (h )稳定5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定5-13 o 73γ= 此题传递函数改为(0.561)()(1)(0.11)(0.0281)K s G s s s s s +=+++或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16s 2s1s3p1p 2p3t t t σσσ<<=< ,5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
第5章5-121arctan arctan T T ωωΦ=∠Φ=-21()arctan arctan )ss c t t T T ωωω=+-5-2 (1)()arctan -arctan G j T ωτωω∠=(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)(2)(3)(4)(5)(6)(7)(8)5-4(1)(3)(4)(6)(7)(8)(1)(2)(3)(4)(6)(7)(8)(10)5-6 (a )12100()11(1)(1)G s s s ωω=++ (b )231221(1)()1(1)s G s s s ωωω+=+(c )112211()11c s G s s s ωωωω⎛⎫+⎪⎝⎭=⎛⎫+ ⎪⎝⎭(d )123()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定 (e )不稳定 (f )不稳定 (g )不稳定 (h )稳定5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定5-13 o 73γ= 此题传递函数改为(0.561)()(1)(0.11)(0.0281)K s G s s s s s +=+++或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16s2s1s3p1p2p3t t t σσσ<<=< ,5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
![自动控制原理第五章课后习题答案(免费)[1]](https://uimg.taocdn.com/11139471f46527d3250ce001.webp)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
⾃动控制原理(梅晓榕)习题答案5第5章5-121 arctan arctan T T ωωΦ=∠Φ=-21()arctan arctan )ss c t t T T ωωω=+-5-2 (1)()arctan -arctan G j T ωτωω∠=(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)(2)(3)(4)(5)(6)(7)(8)5-4(1)(3)(4)(6)(7)(8)(1)(2)(3)(4)(6)(7)(8)(10)5-6 (a )12100()11(1)(1)G s s s ωω=++ (b )23122 1(1)()1(1)s G s s s ωωω+=+(c )112211()11c s G s s s ωωωω??+=+ ?(d )123()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定(b )稳定(c )稳定(d )不稳定(e )不稳定(f )不稳定(g )不稳定(h )稳定5-8 (a )不稳定(b )稳定(c )稳定(d )稳定(e )稳定 5-9 (a )不稳定(b )稳定(c )稳定 5-10 稳定5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定5-13 o 73γ= 此题传递函数改为(0.561)()(1)(0.11)(0.0281)K s G s s s s s +=+++或幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16s2s1s3p1p2p3t t t σσσ<<=< ,5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
自动控制原理课后习题答案自动控制原理课后习题答案自动控制原理是一门应用广泛的学科,它研究如何利用各种控制方法和技术,使得系统能够自动地实现预期的目标。
在学习这门课程的过程中,我们常常会遇到一些习题,下面我将为大家提供一些常见的自动控制原理课后习题的答案。
1. 什么是反馈控制系统?它的优点是什么?反馈控制系统是指通过测量系统输出信号,并将其与预期的参考信号进行比较,然后根据比较结果对系统进行调整的控制系统。
其优点包括:能够减小外部干扰对系统的影响,提高系统的稳定性和鲁棒性;能够根据系统实时的状态进行调整,使得系统能够更好地适应变化的工作环境;能够实现对系统输出的精确控制,提高系统的性能。
2. 描述比例控制器、积分控制器和微分控制器的工作原理。
比例控制器根据系统输出信号与参考信号的差异,按照一定的比例关系进行控制输出。
其工作原理是通过调节控制器输出信号与系统输入信号之间的比例关系,来实现对系统的控制。
积分控制器根据系统输出信号与参考信号的差异的积分值,进行控制输出。
其工作原理是通过积分计算,将系统输出信号与参考信号之间的差异进行累加,然后根据累加值来调节控制器输出信号,以实现对系统的控制。
微分控制器根据系统输出信号与参考信号的差异的变化率,进行控制输出。
其工作原理是通过对系统输出信号与参考信号之间的差异进行微分计算,然后根据微分值来调节控制器输出信号,以实现对系统的控制。
3. 什么是PID控制器?它的控制算法是怎样的?PID控制器是一种常用的控制器,它由比例控制器、积分控制器和微分控制器组成。
其控制算法是根据系统输出信号与参考信号的差异,按照比例、积分和微分的方式进行控制输出。
PID控制器的控制算法可以表示为:输出信号= Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,Kp为比例增益,Ki为积分增益,Kd为微分增益,e(t)为系统输出信号与参考信号的差异,de(t)/dt为差异的变化率。
第6章6-1将原图简化成下图。
(a))()](1[)(11s G s H s G += (b))(1)()()(111s G s H s G s G +=(c)KJs Kss G +=2)(图 框图6-2希望线性部分具有良好的低通滤波特性和高频衰减特性。
6-3非线性系统的稳定性与初始条件、输入信号有关。
非线性系统的运动状态除了收敛、发散外,还有自持振荡。
6-4 )上。
,,在负实轴(,04)(14)(∞--=-=A A N A A N ππ 22424124812(3)(j )j j (j 1)(j 3)910(910)G ωωωωωωωωωω--==+++++++或 212(j )j (3j4)G ωωωω=-+0Im[(j )]03 1.732 G ωω=⇒== 004Re[(j 3)]1 1.274A G A ππ=-=-⇒==自持振荡振幅为1.27,频率为 1.732。
6-5等效框图如下图。
其中 1hk ∆=∆+。
6-6 2234)(143)(AA N A A N -=-⇒=)(1A N -在负实轴上,0)(1)(10→-⇒∞→-∞→-⇒=A N A A N A , )45()2(8j4524)2)(j 1(j j 8)(j 24224++--++-=++=ωωωωωωωωωωG 或 28(j )j (2j3)G ωωωω=-+令1824)2(j 20)](j Im[-==⇒=G G ,ωω 令1341824)(1)2(j 2=⇒-=-⇒-=A AA N G 当A 增加时,-1/N (A )由稳定区域进入不稳定区域,故交点是不稳定点。
A >1时系统发散,A <1时系统收敛。
6-7 512.0=⇒==k b a ,22()[arcsin1()]ka a aN A A A Aπ=+- 21()2[arcsin 1()]N A a a ak A A A-=+-110.20.2 ()()A a A N A N A →=⇒-→-→∞⇒-→-∞; 1()N A -在负实轴上(0.2]-∞-,。
自动控制元件及线路第五版梅晓榕课后答案第一章简介1.1 自动控制的定义自动控制是指利用设备和线路来实现对系统或过程的自动管理和控制。
通过引入传感器、执行器和控制器等元件,可以使系统实现自动运行、自动调节和自动控制。
1.2 自动控制系统的组成自动控制系统主要由以下几个部分组成:•传感器:用于感知被控对象的状态或变量。
•执行器:用于执行控制信号,控制被控对象的状态或变量。
•控制器:通过对传感器的反馈信息进行处理,并生成控制信号,实现对被控对象的控制。
•信号调理电路:用于处理传感器信号,使其符合控制系统的输入要求。
•电源电路:为控制系统提供稳定的电源。
•通信线路:用于传输控制信号和传感器信号。
•被控对象:即需要被控制的系统或过程。
1.3 自动控制系统的分类自动控制系统可以按照不同的标准进行分类。
常见的分类方法包括按照控制方式、按照控制对象、按照控制任务等等。
按照控制方式可以分为开环控制和闭环控制。
开环控制是指控制器仅根据系统输入信号的设定值进行控制,不考虑被控对象的实际输出信号。
闭环控制则是根据系统输出信号与设定值的偏差来调节控制器的输出信号,实现对被控对象的精确控制。
按照控制对象可以分为连续控制系统和离散控制系统。
连续控制系统是指被控对象的输入与输出变量是连续变化的,如温度、压力等。
离散控制系统则是指被控对象的输入与输出是离散的,如开关等。
按照控制任务可以分为调节控制和跟踪控制。
调节控制是指对被控对象的输出变量进行调节,使其达到设定值。
跟踪控制则是指控制系统需要根据某个参考输入信号来跟踪输出信号,如跟踪轨迹等。
第二章传感器2.1 传感器的基本原理传感器是通过物理、化学、生物等效应来实现将被测量物理量转换为电信号的装置。
传感器的基本原理可以分为以下几种:•电阻性原理:根据被测量物理量对电阻的影响,如热敏电阻、应变电阻等。
•电容性原理:根据被测量物理量对电容的影响,如电容式湿度传感器等。
•压阻性原理:根据被测量物理量对压阻的影响,如压力传感器等。
《自动控制原理》课后习题答案(5章)5.1 系统的结构图如图5-68所示。
试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出ss c 和稳态误差ss e 。
⑴()t t r 2sin =⑵()()()︒︒--+=452cos 230sin t t t r图5-1解 系统的传递函数:()()()21+==Φs s R s C s ()()()21++==Φs s s R s E s e 幅频特性及相频特性:()()2,2122ωωωωarctgj j -=Φ+=Φ()()2,21222ωωωωωωarctgarctg j e e -=Φ++=Φ(1)()2,2sin ==ωt t r 稳态输出:()()︒︒-=-+=452sin 221452sin 441t t c ss()︒-≈452sin 354.0t稳态误差:⎪⎭⎫ ⎝⎛-+++=2222sin 2221222arctg arctg t e ss()()︒︒+≈+=43.182sin 791.043.182sin 225t t(2)()()()()()︒︒︒︒+-+=--+=452sin 230sin 452cos 230sin t t t t t r⎪⎪⎭⎫ ⎝⎛+∠+++•-⎪⎪⎭⎫ ⎝⎛+∠+++=︒︒221452sin 221212130sin 211222j t j t c ss ()t t 2sin 225.3sin 55-+=︒ ()t t 2sin 708.05.3sin 447.0-+≈︒⎪⎭⎫ ⎝⎛-++++•-⎪⎭⎫ ⎝⎛-++++=︒︒222452sin 2221221130sin 12112222222arctg arctg t arctg arctg t e ss ()()︒︒︒︒︒︒-++•--++=4543.63452sin 410257.264530sin 510t t ()()︒︒+-+≈43.632sin 582.143.48sin 632.0t t ()()︒︒--+=57.1162sin 582.143.48sin 632.0t t5.2 若系统的单位阶跃响应:()t t e e t h 948.08.11--+-=()0≥t 试求系统的频率特性。
直流测速发电机1.为什么直流发电机电枢绕组元件的电势是交变电势而电刷电势是直流电势?答:电枢连续旋转,导体ab和cd轮流交替地切割N极和S极下的磁力线,因而ab和cd中的电势及线圈电势是交变的。
由于通过换向器的作用,无论线圈转到什么位置,电刷通过换向片只与处于一定极性下的导体相连接,如电刷A始终与处在N极下的导体相连接,而处在一定极性下的导体电势方向是不变的,因而电刷两端得到的电势极性不变,为直流电势。
2. 如果图2 - 1 中的电枢反时针方向旋转,试问元件电势的方向和A、B电刷的极性如何?答:在图示瞬时,N极下导体ab中电势的方向由b指向a,S极下导体cd中电势由d指向c。
电刷A通过换向片与线圈的a端相接触,电刷B与线圈的d端相接触,故此时A电刷为正,B电刷为负。
当电枢转过180°以后,导体cd处于N极下,导体ab处于S极下,这时它们的电势与前一时刻大小相等方向相反,于是线圈电势的方向也变为由a到d,此时d为正,a为负,仍然是A刷为正,B刷为负。
4. 为什么直流测速机的转速不得超过规定的最高转速? 负载电阻不能小于给定值?答:转速越高,负载电阻越小,电枢电流越大,电枢反应的去磁作用越强,磁通被削弱得越多,输出特性偏离直线越远,线性误差越大,为了减少电枢反应对输出特性的影响,直流测速发电机的转速不得超过规定的最高转速,负载电阻不能低于最小负载电阻值,以保证线性误差在限度的范围内。
而且换向周期与转速成反比,电机转速越高,元件的换向周期越短;eL正比于单位时间内换向元件电流的变化量。
基于上述分析,eL必正比转速的平方,即eL∝n2。
同样可以证明ea ∝n2。
因此,换向元件的附加电流及延迟换向去磁磁通与n2成正比,使输出特性呈现非线性。
所以,直流测速发电机的转速上限要受到延迟换向去磁效应的限制。
为了改善线性度,采用限制转速的措施来削弱延迟换向去磁作用,即规定了最高工作转速。
第三章1. 直流电动机的电磁转矩和电枢电流由什么决定?答;直流电动机的电枢电流不仅取决于外加电压和本身的内阻,而且还取决于与转速成正比的反电势(当Ø=常数时)根据转矩平衡方程式,当负载转矩不变时,电磁转矩不变;加上励磁电流If不变,磁通Φ不变,所以电枢电流Ia也不变,直流电动机的电磁转矩和电枢电流由直流电动机的总阻转矩决定。
第5章
5-1
21 arctan arctan T T ωωΦ=
∠Φ=-
21()arctan arctan )ss c t t T T ωωω=+-
5-2 (1)()arctan -arctan G j T ωτωω∠=
(2)1212()arctan arctan -arctan -arctan G j aT bT T T ωωωωω∠=+ 5-3 (1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
5-4(1)
(3)
(4)
(6)
(7)
(8)
(1)
(2)
(3)
(4)
(6)
(7)
(8)
(10)
5-6 (a )12100
()11
(1)(1)
G s s s ωω=++ (b )23122
1
(
1)()1(1)s G s s s ωωω+=+
(c )11221
1()11c s G s s s ωωωω⎛⎫
+
⎪
⎝⎭=⎛⎫+ ⎪⎝⎭
(d )123
()11(1)(1)s G s s s ωωω=++ 5-7 (a )稳定 (b )稳定 (c )稳定 (d )不稳定 (e )不稳定 (f )不稳定 (g )不稳定 (h )稳定
5-8 (a )不稳定 (b )稳定 (c )稳定 (d )稳定 (e )稳定 5-9 (a )不稳定 (b )稳定 (c )稳定 5-10 稳定
5-11 1:稳定 2:不稳定 3:稳定 4:不稳定 5-12 不稳定
5-13 o 73γ= 此题传递函数改为(0.561)
()(1)(0.11)(0.0281)
K s G s s s s s +=
+++
或 幅值穿越频率 5.13rad/s c ω=,o 46.5γ=。
5-14(1)(j )48.2c G ω∠=-,o 131.8γ=(2)(j )155.4c G ω∠=-,o 24.6γ=
5-15 o o o (1)55 20dB/dec (2)-15.840dB/dec (3)-52.860dB/dec --- ,,, 5-16
s2s1s3p1p2p3t t t σσσ<<=< ,
5-17 (1)o 54.9 20lg g K γ==∞,,系统稳定。
(2)o -46.5 20lg -g K γ==∞,,系统不稳定。
5-18 o 100(0.11)
()1045(1)(0.011)
c s G s s s s ωγ+=
==++ ,,
r r n 1 2 3ζζθζθζωM M 曲线说明 * * 大 由图 * * 小 大, 小 * * 大 小, 大大 由
n n n n ζωζωζωζωωs p p * 大 * 由图 * 大 小 由 及t * 小 大 与反比σ * * 大 小,σ 大大 大 由
说明:以下各设计题目,一般都有多种解。
5-19 超前补偿法。
固有部分(待补偿系统) 0100
()(0.041)
G s s s =
+
超前补偿 c 0.041()0.0081s G s s +=
+;设计后 e 100
()(0.0081)
G s s s =+
滞后补偿法。
固有部分 010
()(0.041)
G s s s =
+
滞后补偿 c 110
()10101s G s s +=+;设计后 e 100(1)
()(0.041)(101)
s G s s s s +=++ 5-20 K =10,c 0.51
()0.151
s G s s +=+ 等等。
提示:可利用二阶系统公式。
5-21 c e 2
(21)(0.21)100(21)
()()(66.71)(0.11)(66.71)(0.11)s s s G s G s s s s s s +++=
=++++ ;等等
5-22 11(1)100(1)
1616()()11(1)(0.11)(1)160160c e s s G s G s s s s s ++==
+++; 等等 5-23 (101)10(101)
() ()(1001)(1001)(1)(0.251)
c e s s G s G s s s s s s ++=
⇒=++++等等
5-24 11
(
1)(1)
0.37.6()11(1)(1)0.067143
c s s G s s s ++=++
2111000(1)(1)
0.37.6()(1)(0.91)(0.0071)0.067
e s s G s s s s s ++=
+++ 等等 5-25 根据二阶系统的计算公式。
0.00635h K =,反馈补偿后的开环传递函数为16000
()(141.6)
G s s s =+。
5-26反馈补偿后系统的开环传递函数为 215150
()0.1(115)(10150)
G s s h s s s h =
=++++
0.0967h =
5-27 110200K K ==,,c ()200(0.11)
s
H s s =
+
5-28 1171(
1)710(1)3535()()11(1)(0.11)(1)(0.0011)400400
c e s s G s G s s s s s s s ++==++++,等 5-29 0 1.41()(1)(1)
1010000
G s s s =++;11(1)(1)
2.510()10011(1)(1)0.26100c s s G s s s s ++=++等
5-30 补偿装置的对数频率特性见图。
)120
1
)(121()141
(20)(+++=s s s s s G e 0201arctan 41arctan 120
1)
141
(10)()()(0>-=∠++==ωωc e c G s s s G s G s G ,
补偿装置是超前网络,本身相位角为正,可提高相位裕度。
图 对数频率特性
5-31 K =2000,)14.01)(12001()
131.0)(191
()(++++=s s s s s G c 等等
5-32 11
(1)(1)
1.510()411(1)(1)0.36200
c s s G s s s ++=++ 等等
5-33 K =200,1
(1)
10()1
(1)3
c s G s s +=+
5-34 11
(1)(1)3503
10()300(1)(1)0.4140
c s s G s s s ++=⋅++ 等等 5-35 2
0.0167()0.21
c s H s s =+
5-36 2
0.0020.91 ()0.005 ()0.11c c c s H H s s H s s =-==+;;
5-37 20.63(0.11)
() 3.51
c s s H s s +=+ 等等
5-38 0.283()0.251
c s
H s s =+
5-39
→→→→123222111ω 0 1/ 1/ 1/ (s) s T s T s T T ∞T T T KT KT K K
G 2
32222
1113 s 20lg (j ω) 20lg 20lg 20lg 20lg ωωωωKT KT K K
G T T T T
5-40
(1)2
n
222
n n n 22
22n n n n n n
2()
()()212s s Y s G s X s s s Ks
Ks s s ωζωωωωζωωωζωω++===++++++ 2n
22
n n n
2(1)2K s s ωωζωωζ
=
+++
阻尼比 n
(1)2K ωζζζ
+
>,可见微分反馈可增加系统阻尼比。
(2)2n
2
n n 2222
n
n n n n (2)()
()()21(1)(2)
s s Y s G s X s s s K s Ks s s ωζωωωζωωωζω+===++++++ 2n
2
2
n n n
2(1)2K s s ωωζωωζ
=
+++
阻尼比 n
(1)2K ωζζζ
+>,可见微分反馈补偿系数K 可增加系统阻尼比。