红外控制智能小车PPT
- 格式:pptx
- 大小:325.80 KB
- 文档页数:14

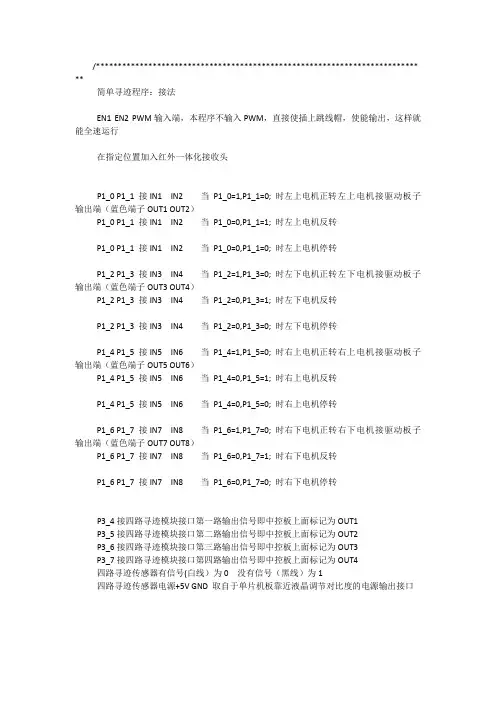
/************************************************************************** **简单寻迹程序:接法EN1 EN2 PWM输入端,本程序不输入PWM,直接使插上跳线帽,使能输出,这样就能全速运行在指定位置加入红外一体化接收头P1_0 P1_1 接IN1 IN2 当P1_0=1,P1_1=0; 时左上电机正转左上电机接驱动板子输出端(蓝色端子OUT1 OUT2)P1_0 P1_1 接IN1 IN2 当P1_0=0,P1_1=1; 时左上电机反转P1_0 P1_1 接IN1 IN2 当P1_0=0,P1_1=0; 时左上电机停转P1_2 P1_3 接IN3 IN4 当P1_2=1,P1_3=0; 时左下电机正转左下电机接驱动板子输出端(蓝色端子OUT3 OUT4)P1_2 P1_3 接IN3 IN4 当P1_2=0,P1_3=1; 时左下电机反转P1_2 P1_3 接IN3 IN4 当P1_2=0,P1_3=0; 时左下电机停转P1_4 P1_5 接IN5 IN6 当P1_4=1,P1_5=0; 时右上电机正转右上电机接驱动板子输出端(蓝色端子OUT5 OUT6)P1_4 P1_5 接IN5 IN6 当P1_4=0,P1_5=1; 时右上电机反转P1_4 P1_5 接IN5 IN6 当P1_4=0,P1_5=0; 时右上电机停转P1_6 P1_7 接IN7 IN8 当P1_6=1,P1_7=0; 时右下电机正转右下电机接驱动板子输出端(蓝色端子OUT7 OUT8)P1_6 P1_7 接IN7 IN8 当P1_6=0,P1_7=1; 时右下电机反转P1_6 P1_7 接IN7 IN8 当P1_6=0,P1_7=0; 时右下电机停转P3_4接四路寻迹模块接口第一路输出信号即中控板上面标记为OUT1P3_5接四路寻迹模块接口第二路输出信号即中控板上面标记为OUT2P3_6接四路寻迹模块接口第三路输出信号即中控板上面标记为OUT3P3_7接四路寻迹模块接口第四路输出信号即中控板上面标记为OUT4四路寻迹传感器有信号(白线)为0 没有信号(黑线)为1四路寻迹传感器电源+5V GND 取自于单片机板靠近液晶调节对比度的电源输出接口关于单片机电源:本店驱动模块内带LDO稳压芯片,当电池输入6V时时候可以输出稳定的5V分别在针脚标+5 与GND 。

