附合导线计算方法
- 格式:doc
- 大小:29.00 KB
- 文档页数:5

闭合及附合导线丈量内业计算方法(好东西)之老阳三干创作1.导线方位角计算公式当β为左角时α前=α后+β左-180°当β为右角时α前=α后-β右+180°2. 角度闭合差计算fβ=(α始-α终)+∑β左-n*180°fβ=(α始-α终)-∑β右+n*180°3. 观测角改正数计算公式Vβ=±fβ/ n若观察角为左角,应以与闭合差相反的符合分配角度闭合差,若观察角为右角,应以与闭合差相同的符合分配角度闭合差。
4. 坐标增量闭合差计算∑△X=X终-X始∑△Y= Y终-Y始Fx=∑△X测-∑△XFY=∑△Y测-∑△Y5. 坐标增量改正数计算公式VX=- Fx/∑D³DiVY=-FY/∑D³Di² ²所以:∑VX=- Fx ∑VY=- FY6. 导线全长绝对闭合差F=SQR(FX^2+FY^2)7. 导线全长相对闭合差K=F/∑D=1/∑D/F8. 坐标增量计算导线丈量的内业方法自己不才悉心整理出来的望能给同行业人士提供点资料(一)闭合导线内业计算已知A点的坐标XA=450.000米,YA=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。
1角度闭合差:图6—8 闭合导线算例草图角度的改正数△β为:2、导线边方位角的推算BC边的方位角CD边的方位角AB边的方位角右角推算方位角的公式:(校核)3、坐标增量计算设D12、α12为已知,则12边的坐标增量为:4、坐标增量闭合差的计算与调整因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即:但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而发生一个差值,这个差值称为坐标增量闭合差。
分别用暗示:缺口AA′的长度称为导线全长闭合差,以f暗示。
由图可知:图6—9 闭合导线全长闭合差导线相对闭合差。

附合导线方位角闭合差计算公式的探讨
附合导线方位角闭合差是实现控制周解导线法运算的一种重要参数。
它代表了解导线和要控制的对准方位角之间的实际差异。
其指标越小,控制效果越好,说明解导线和要控制的对准方位角实际越接近。
附合导线方位角闭合差可以通过下面的计算公式来确定:
附合导线方位角闭合差=[解导线末附密对准方位角-(起点对准方位角+中间导线折返总差)]xK
其中,K为参数,默认值为1. K的取值会影响控制效果,当K取值较大时,附合导线方位角闭合差将变大,说明控制效果较差;当K取值较小时,附合导线方位角闭合差将变小,说明控制效果较好。
以上是附合导线方位角闭合差计算公式的原理。
有了上述计算公式,我们可以得出控制效果的一个指标,从而方便我们对控制周解导线法运算的结果进行判断与比较。
附合导线测量内业计算步骤
附合导线测量是导线测量的一种,它是由两个或更多已知控制点出发,经过一系列观测站,最终附合到另一个已知控制点上的导线测量。
下面是附合导线测量内业计算的一般步骤:
1. 准备工作:检查外业观测数据,确保数据的完整性和准确性。
包括观测角度、边长和高差等数据。
2. 角度闭合差的计算与调整:根据附合导线的转角观测值,计算出角度闭合差。
如果角度闭合差超过允许的限值,需要进行调整。
3. 坐标方位角的推算:根据起始边的坐标方位角和转角观测值,依次推算各导线边的坐标方位角。
4. 坐标增量的计算:根据各导线边的边长和坐标方位角,计算出各点之间的坐标增量。
5. 坐标闭合差的计算与调整:计算出各个点的坐标闭合差,检查是否符合限差要求。
如果超过限差,需要进行调整。
6. 坐标计算:根据经过调整后的坐标增量,计算出各点的坐标。
7. 精度评定:计算导线的全长相对闭合差、测角中误差等精度指标,评定导线测量的精度。
8. 成果整理:整理计算结果,编写附合导线测量的技术报告。
需要注意的是,具体的计算步骤和方法可能会因使用的测量仪器、数据处理软件以及相关规范的要求而有所差异。
在进行附合导线测量内业计算时,应参考相应的规范和技术手册,并确保使用正确的计算方法和参数。
附合导线角度闭合差计算公式
高差闭合差可以定义为:在控制测量中,实测高差的总和与理论高差的总和之间的差值,表示为:fh=∑h测-∑h理。
在外业时,可用该公式检验外业的质量,判断是否结束外业。
三种水准路线计算高差闭合差所用的公式如下:
滑动水准路线、支水准路线:fh=∑a-∑b。
附合水准路线:fh=∑a-∑b-(h始-h终)。
以上公式比较抽象化,若并使高差滑动高这一概念抽象化,必须从高差的概念抓起,对公式进一步推论:
fh=∑h测-∑h理=(h终测-h始)-(h终理-h始)=h终测-h终理。
从公式可以窥见,高差滑动高就是终点的量测高程与终点的理论高程的差值。
在高差闭合差的计算中:计算的高差闭合差要和容许值相比,若超出容许范围,则应返工重新测量每个测站的高差,在不超出容许值的情况下才可进行下一步骤—闭合差的调整。
如:fh=-10mm小于fh容=8.26mm。
在滑动高的调整中:推论最后一个废止数与否与排序的高差滑动高大小成正比、符号恰好相反,否则不容许展开废止后的高程排序。
例如:最后一个废止数0.m,与高差滑动差fh=-0.m大小成正比、符号恰好相反。
在高程的计算中:判断改正后的终点高程是否等于理论值。
如:改正后的终点高程为.m,它等于终点6号点的已知高程. m,从而判断平差结果正确。
子学习情境2-7 附合导线内业计算附合导线计算与闭合导线计算步骤基本相同,但是由于二者布设形式不同,表现在角度闭合差和坐标增量闭合差的计算公式上略有差别。
下面着重介绍其不同之处。
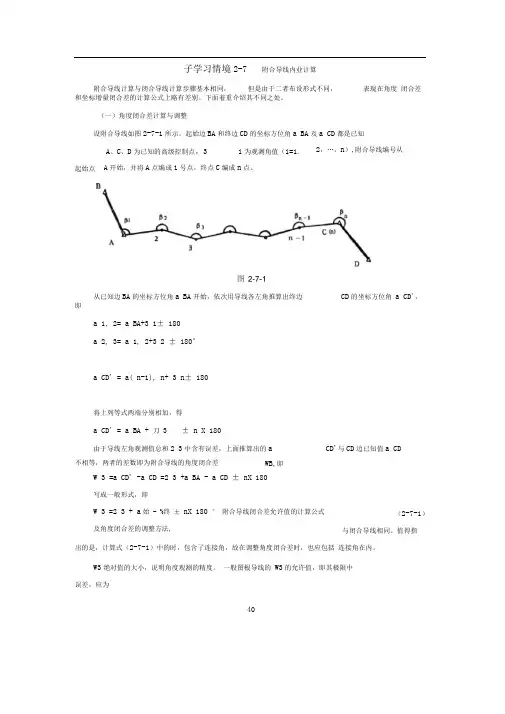
(一)角度闭合差计算与调整设附合导线如图2-7-1所示。
起始边BA和终边CD的坐标方位角a BA及a CD都是已知A、C、D为已知的高级控制点,3 i为观测角值(i=1.起始点从已知边BA的坐标方位角a BA开始,依次用导线各左角推算出终边CD的坐标方位角a CD',即a 1, 2= a BA+3 1± 180a 2, 3= a 1, 2+3 2 ± 180°a CD' = a( n-1), n+ 3 n± 180将上列等式两端分别相加,得a CD' = a BA + 刀3 ± n X 180由于导线左角观测值总和2 3中含有误差,上面推算出的aW 3 =a CD' -a CD =2 3 +a BA - a CD ± nX 180写成一般形式,即W 3 =2 3 + a始 - %终± nX 180 ° 附合导线闭合差允许值的计算公式及角度闭合差的调整方法,出的是,计算式(2-7-1)中的时,包含了连接角,故在调整角度闭合差时,也应包括连接角在内。
W3绝对值的大小,说明角度观测的精度。
一般图根导线的W3的允许值,即其极限中误差,应为402,…,n),附合导线编号从CD'与CD边已知值a CD不相等,两者的差数即为附合导线的角度闭合差WB,即(2-7-1)与闭合导线相同。
值得指A开始,并将A点编成1号点,终点C编成n点。
W xVxi= -S(2-7-2)式中n 为导线折角个数(包括两个导线的定向角)。
若 |W 3 |> | W 3允I ,则应重新观测各折角; 若|W 3 | < | W 3允I ,通常将W 3反号, 平均分配到各折角的观测值中。
附合导线计算程序附合导线是指由多段等径钢丝绞成的导线,其独特的结构使得其具有较高的强度和抗风飘性能。
附合导线的计算对于电力工程和通信工程非常重要,可帮助确定其承载能力和选择最佳的导线类型。
下面是一个附合导线计算程序的详细介绍,包括计算步骤、公式和注意事项等。
计算步骤:1.确定导线的材质和形状:附合导线通常由钢丝制成,而且形状为等径钢丝。
2.确定导线的直径和数量:根据设计要求和实际情况,确定附合导线的直径和钢丝的数量。
一般来说,附合导线的直径越大,承载能力越高。
3.计算导线的断面积:根据导线的直径和数量,计算出附合导线的断面积。
附合导线的断面积可以用以下公式计算:A=π*(d/2)^2*n 其中,A为附合导线的断面积,d为钢丝的直径,n为钢丝的数量。
4.计算导线的应力:根据设计要求和实际情况,确定附合导线所受的最大应力。
附合导线的最大应力可以使用以下公式计算:σ=F/A 其中,σ为附合导线的应力,F为附合导线所受的最大力,A为附合导线的断面积。
5.判断应力是否满足要求:根据设计要求和实际情况,判断附合导线的应力是否满足要求。
如果应力满足要求,则可以选择当前的附合导线;如果应力不满足要求,则需要重新选择导线的直径和数量。
注意事项:1.在计算附合导线的断面积时,应使用钢丝的实际直径。
由于钢丝绞合后会产生一定的空隙,所以附合导线的实际直径会略大于理论计算值。
2.在计算附合导线的应力时,应考虑导线所受的各种力的影响,如重力、风荷载等。
3.附合导线的选择要满足强度和刚度的要求。
强度要能满足导线的承载能力,刚度要能满足导线的抗风飘性能。
4.在选择附合导线时,还需要考虑导线的电阻和电容等电气参数,以及导线的耐腐蚀性能等因素。
总结:附合导线计算程序能够帮助工程师确定导线的承载能力和选择最佳的导线类型。
通过计算导线的断面积和应力等参数,可以判断导线是否满足要求,并进行适当的调整。
同时,在计算过程中需要考虑导线的实际情况和设计要求,以确保计算结果的准确性和可靠性。
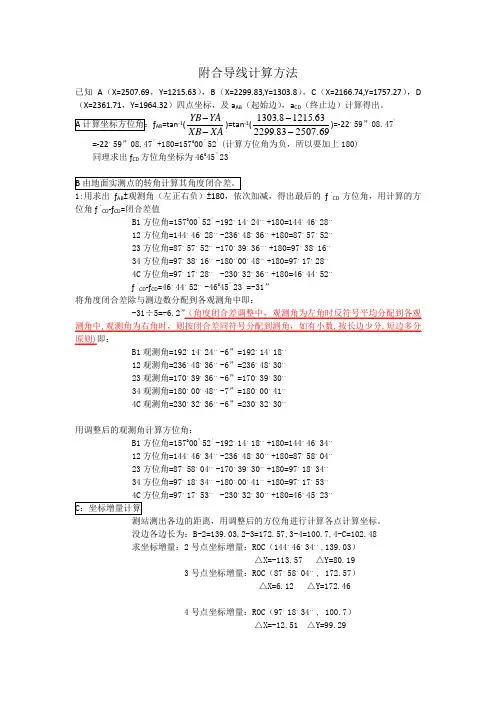
附合导线计算方法已知A (X=2507.69,Y=1215.63),B (X=2299.83,Y=1303.8),C (X=2166.74,Y=1757.27),D (X=2361.71,Y=1964.32)四点坐标,及a AB (起始边),a CD (终止边)计算得出。
ƒAB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。
59”08.47’ =-22。
59”08.47’+180=157000”52’(计算方位角为负,所以要加上180)同理求出ƒCD 方位角坐标为46045”23’1:用求出 ƒAB ±观测角(左正右负)±180,依次加减,得出最后的ƒ‘CD 方位角,用计算的方位角ƒ‘CD -ƒCD =闭合差值B1方位角=157000”52’-192。
14,24,,+180=144。
46,28,,12方位角=144。
46,28,,-236。
48,36,,+180=87。
57,52,,23方位角=87。
57,52,,-170。
39,36,,,+180=97。
38,16,,34方位角=97。
38,16,,-180。
00,48,,+180=97。
17,28,,4C 方位角=97。
17,28,, -230。
32,36,,+180=46。
44,52,,ƒ‘CD -ƒCD =46。
44,52,,-46045”23’=-31”将角度闭合差除与测边数分配到各观测角中即:-31÷5=-6.2”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即:B1观测角=192。
14,24,,-6”=192。
14,18,,12观测角=236。
48,36,,-6”=236。
48,30,,23观测角=170。
39,36,,-6”=170。
测绘中级附合导线测量的内业计算的方法步骤-CAL-FENGHAI.-(YICAI)-Company One1第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)y图6-10 坐标增量计算根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
创作:闭合及附停导钱測侵內业针算方 族(虧东®)1. 専钱方儘帘针篇公式£卩怎疋笑时a 甫=a 后+卩左・180°省卩签右侖时a ^=a 后・卩右+180°2. 角凌闭合爰针算fp=(a 胎・ct 终)+乂卩 y4-n*180°fp=(a 胎・a 终卜工卩右+n*180°3. %测角改正叙针篇公式V (3=±fp/11苦规塞角务左角,溢M 马闻合老相及的符合今紀他及 闻合爰,苦瓏察角务右角,疝"马闭合爰相同的苻合今 甬乙角及闭合爰。
4. 址标憎蜃闻合爰针篇EAX=X 终-X 胎^AY= Y ^-Y 胎Fx=^AX 侧送Z\XFY=MY ^!-X AY5.坐标憎蜃改正斂针算公式VX=- Fx/£D3DiVY=-FY/XD3Di2 2所:J;VX=・ Fx ^VY=- FY6.専钱舍g他对闻合爰F=SQR (FXT+FYT 丿7.専钱舍g相対闻合盖K=F/XD=1/^D/F8.坐标憎蜃针篇导钱测蜃的內地方注徐人亲才悉必魅理出来的望饨洽同行止人士提供点资(一丿冈合导钱內地针算己知A 点的坐标XA = 450.000 来,YA = 450.000專钱各边g,各內命和起胎边AB的方儘角aAB矗團所亦,弑针篇B、C, D、E各点的坐标。
1角凌闻合爰:囹6—8闭合导钱篇例革囹角及的改正欷厶卩怎:2、导钱边方儘角的推算BC边的方儘角CD边的方儘角AB边的方儘帝右角雅算方儘角的公式;(僅核丿3、坐标憎蜃针筹殺D12、Q12伶己知,则12边的坐栋憎養%:4、坐标憎蜃闭合妾的针算与调逹因务闭合导後是一闭合多边彬,曳坐标憎蜃的代毅和在理论上盜普孑农,即:仪由孑侧虧导钱边盘和九侧內角过程申爲恵誤爰,所 "实隊上坐栋橹蜃之和往往耒综孑參而产或一个爰值,这个妾值烈為坐标憎逼闻合爰。
今别用表示:缺口AA,的艮茨称岛専钱全盘闻合爰,“If素亦。
三、附合导线坐标计算附合导线的坐标计算与闭合导线的坐标计算基本相同,仅在角度闭合差的计算与坐标增量闭合差的计算方面稍有差别。
1.角度闭合差的计算与调整(1)计算角度闭合差 如图6-13所示,根据起始边AB 的坐标方位角AB α及观测的各右角,按式(4-19)推算CD 边的坐标方位角CDα'。
B AB B βαα-︒+=1801 1112180βαα-︒+=B1429.02m1283.17m图6-13 附合导线略图21223180βαα-︒+=32334180βαα-︒+=C CDβαα-︒+='+180)34∑-︒⨯+='m AB CDβαα1805 写成一般公式为:∑-︒⨯+='R n βαα1800fin(6-18) 若观测左角,则按下式计算:∑+︒⨯+='L n βαα1800fin(6-19) 附合导线的角度闭合差f β为:fin finααβ-'=f (6-20)(2)调整角度闭合差 当角度闭合差在容许范围内,如果观测的是左角,则将角度闭合差反号平均分配到各左角上;如果观测的是右角,则将角度闭合差同号平均分配到各右角上。
2.坐标增量闭合差的计算附合导线的坐标增量代数和的理论值应等于终、始两点的已知坐标值之差,即⎭⎬⎫-=∆-=∆∑∑0fin th 0fin th y y y x x x (6-21)纵、横坐标增量闭合差为:⎭⎬⎫--∆=∆-∆=--∆=∆-∆=∑∑∑∑∑∑)()(0fin th 0fin th y y y y y W x x x x x W y x (6-22)图6-13所示附合导线坐标计算,见表6-7。
表6-7 附合导线坐标计算表。
附合导线计算方法
已知A (X=,Y=),B (X=,Y=),C (X=,Y=),D (X=,Y=)四点坐标,及a AB (起始边),
AB =tan -1(XA
XB YA
YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。
59”’ =-22。
59”’+180=157000”52’(计算方位
角为负,所以要加上180)
同理求出0”’
1:用求出 AB ±观测角(左正右负)±180,
依次加减,得出最后的‘CD 方位角,用计算
的方位角‘CD -CD =闭合差值
B1方位角=157000”52’-192。
14,24,,+180=144。
46,28,,
12方位角=144。
46,28
,,-236。
48,36,,+180=87。
57,52,,
23方位角=87。
57,52,,-170。
39,36,,,+180=97。
38,16,,
34方位角=97。
38,16,,-180。
00,48,,+180=97。
17,28,,
4C方位角=97。
17,28,,-230。
32,36,,+180=46。
44,52,,
‘
-CD=46。
44,52,,
CD
-46045”23’=-31”
将角度闭合差除与测边数分配到各观测角中即:-31÷5=”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即:
B1观测角=192。
14,24,,-6”=192。
14,18,,
12观测角=236。
48,36,,-6”=236。
48,30,,
23观测角=170。
39,36,,-6”=170。
39,30,,
34观测角=180。
00,48,,-7”=180。
00,41,,
4C观测角=230。
32,36,,-6”=230。
32,30,,
用调整后的观测角计算方位角:
B1方位角=157000”52’-192。
14,18,,+180=144。
46,34,,
12方位角=144。
46,34,,-236。
48,30,,+180=87。
58,04,,
23方位角=87。
58,04,,-170。
39,30,,+180=97。
18,34,,
34方位角=97。
18,34,,-180。
00,41,,+180=97。
17,53,,
4C方位角=97。
17,53,,。
,,,。
45,23,,
测站测出各边的距离,用调整后的方位角进行计算各点计算坐标。
每边各边长为:B-1=,2-3=,3-4=,4-C=
求坐标增量:1号点坐标增量:ROC(144。
46,34,,,)
△X= △Y=
2号点坐标增量:ROC(87。
58,04,,, )
△X= △Y=
3号点坐标增量:ROC(97。
18,34,,, )
△X= △Y=
4号点坐标增量:ROC(97。
17,53,,, )
△X= △Y=
C点计算坐标为:X=++++=
Y=++++=
闭合差为:X=计算终点X坐标-设计终点X坐标=-=
=计算
Y
终点Y坐标-设计终点Y坐标=-=
将闭合边长差按路线边长与总边长的比例反向分配到坐标增量后计算各点坐标:
1号点X坐标=上点X坐标+改正后的坐标
1号点Y坐标=上点Y坐标+改正后的坐标别的点号坐标计算方法同理。