泓格模块使用说明
- 格式:pdf
- 大小:5.57 MB
- 文档页数:55

I-7530 RS-232/CAN 转换器使用手册(Version 2.3, Oct/2009)目录1. 简介 (1)1.1 特性 (2)1.2 规格 (3)2. 硬件 (5)2.1 硬件方块图 (5)2.2 脚位说明 (6)2.3 硬件连接 (8)2.4 终端电阻设定 (9)2.5 初始/正常(Init/Normal) 设定开关 (10)2.6 LED指示灯号 (11)2.7 线路选择 (13)3. 工具软件 (14)3.1 如何设定模块参数 (15)3.2 如何设定接受码(ACC)与接受屏蔽(ACM) (19)3.3 在CAN网络上测试I-7530(仅适用于正常模式) (20)3.4 配对联机(Pair Connection)模式说明 (22)4. 命令表 (28)4.1 tIIILDD...[CHK]<CR> (30)4.2 TIIIL[CHK]<CR> (31)4.3 eIIIIIIIILDD...[CHK]<CR> (32)4.4 EIIIIIIIIL[CHK]<CR> (33)4.5 S[CHK]<CR> (34)4.6 C[CHK]<CR> (36)4.7 P0BBDSPAE[CHK]<CR> (37)4.8 P1B [CHK]<CR> (39)4.9 RA[CHK]<CR> (40)4.10 一般命令错误码 (41)5. 故障排除: (42)1. 简介CAN(Controller Area Network;控制器局域网络)是一种串行式总线控制协议,适合用于建构智能型工业设备网络及自动控制系统。
一些可程序的控制器,如PC ,I-8000,WinPAC-8000嵌入式控制器可以透过使用I-7530来控制CAN的网络。
因此,这些控制器可以透过I-7530控制或监控CAN设备。
此外,我们扩展了I-7530一些额外的特殊应用功能。

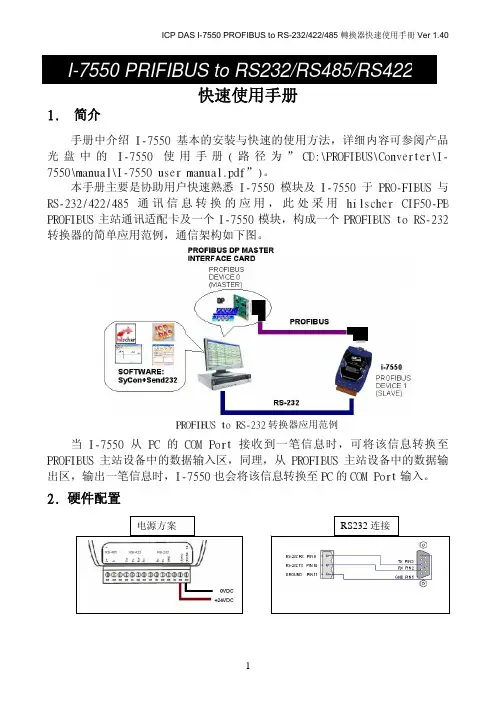
快速使用手册1. 简介手册中介绍I-7550基本的安装与快速的使用方法,详细内容可参阅产品光盘中的I-7550使用手册(路径为”CD:\PROFIBUS\Converter\I-7550\manual\I-7550 user manual.pdf ”)。
本手册主要是协助用户快速熟悉I-7550模块及I-7550于PRO-FIBUS 与RS-232/422/485通讯信息转换的应用,此处采用hilscher CIF50-PB PROFIBUS 主站通讯适配卡及一个I-7550模块,构成一个PROFIBUS to RS-232转换器的简单应用范例,通信架构如下图。
PROFIBUS to RS-232转换器应用范例当I-7550从PC 的COM Port 接收到一笔信息时,可将该信息转换至PROFIBUS 主站设备中的数据输入区,同理,从PROFIBUS 主站设备中的数据输出区,输出一笔信息时,I-7550也会将该信息转换至PC 的COM Port 输入。
2. 硬件配置PROFIBUS连接建议采用标准PROFIBUS电缆线及标准PROFIBUS 9-PIN D型接头,设备连接仅须要使用PROFIBUS电缆上的D型接头,连接PROFIBUS主站设备与I-7550模块,如下图。
在此连接范例中,PROFIBUS主站设备与I-7550模块皆属终端设备,因此需将D型接头上的终端电阻,设为ON。
I-7550模块地址设定I-7550属于PROFIBUS通讯中的从站设备,通讯地址可从内部的DIP SWITCH设定,将I-7550上盖板打开,即可看到DIP SWITCH,如下图,在此将其设定为1,设定范围为0~126。
LED状态显示灯号名称状态描述PWR闪烁电源供应正常,I-7550 COM端口正进行数据传送或接收持续亮灯电源供应正常,I-7550运作正常熄灭电源异常ERR闪烁装置异常,有故障诊断信息持续亮灯与PROFIBUS主站联机异常或PROFIBUS系统配置不正确熄灭与PROFIBUS主站完成系统配置,功能正常运作RUN 持续亮灯已进入数据交换模式,功能正常运作熄灭未进入数据交换模式3. I-7550通讯流程任何DP-Master要与I-7550联机时,必须经过下列步骤才能够正常的与I-7550进行沟通。


tGW-700系列中文使用手册(版本1.2, 2011年7月)目录检查配件 (1)更多信息 (1)1. 产品介绍 (2)1.1 何谓E THERNET 解决方案 (3)1.2 何谓W EB S ERVER技术 (4)2.硬件信息 (5)2.1 规格 (5)2.2 特色 (6)2.3 选型指南 (6)2.4 T GW-700配置图 (7)2.5 机构图 (9)2.6 脚位定义 (11)2.6.1 tGW-712 脚位定义 (11)2.6.2 tGW-722 脚位定义 (12)2.6.3 tGW-732 脚位定义 (13)2.6.4 tGW-715 脚位定义 (14)2.6.5 tGW-725 脚位定义 (15)2.6.6 tGW-735 脚位定义 (16)2.6.7 tGW-718 脚位定义 (17)2.6.8 tGW-724 脚位定义 (18)2.6.9 tGW-734 脚位定义 (19)2.7 RS-232/422/485接线 (20)2.7.1 RS-232 接线 (20)2.7.2 RS-422 接线 (21)2.7.3 RS-485 接线 (21)3. 启动TGW-700模块 (22)步骤1:连接电源和计算机主机 (22)步骤2:安装M ODBUS U TILITY及E S EARCH U TILITY 到您的计算机 (23)步骤3:以太网络配置设定 (24)步骤4:测试 T GW-700 (25)4. 配置网页 (29)4.1 登入T GW-700网页服务器 (29)4.2 H OME 首页 (31)4.3 N ETWORK S ETTING (32)4.3.1 Network and Miscellaneous Settings (32)4.3.2 IP Address Selection (32)4.3.3 General Configuration Settings (35)4.3.4 Restore Factory Defaults (36)4.4 P ORT1设定 (37)4.4.1 Port1 Settings (37)4.4.2 Port Settings (37)4.4.3 Pair-Connection Settings (38)4.5C HANGE P ASSWORD (39)4.6L OGOUT (39)5. TGW-700 应用 (40)5.1 M ODBUS G ATEWAY (40)5.2 P AIR-C ONNECTION应用 (41)步骤1:连接至网络、电源和计算机主机 (42)步骤2:以太网络配置设定 (43)步骤3:在 T GW-700#1网页服务器配置P AIR-C ONNECTION (43)步骤4:在 T GW-700#2网页服务器配置P AIR-C ONNECTION (45)步骤5:测试P AIR-C ONNECTION 功能 (45)附录: 相关名词 (48)1. ARP(A DDRESS R ESOLUTION P ROTOCOL) (48)2. C LIENTS/S ERVERS (48)3. E THERNET (48)4. F IRMWARE (48)5. G ATEWAY (49)6. ICMP(I NTERNET C ONTROL M ESSAGES P ROTOCOL) (49)7. I NTERNET (49)8. IP(I NTERNET P ROTOCOL) ADDRESS (49)9. MAC(M EDIA A CCESS C ONTROL) ADDRESS (49)10. P ACKET (50)11. P ING (50)12. RARP(R EVERSE A DDRESS R ESOLUTION P ROTOCOL) (50)13. S OCKET (50)14. S UBNET M ASK (50)15. TCP(T RANSMISSION C ONTROL P ROTOCOL) (51)16. TCP/IP (51)17. UDP(U SER D ATAGRAM P ROTOCOL) (51)附录: FAQ (52)1. 使用IE浏览器进入T GW-700网页服务器时,如IE浏览器画面显示为空白,请执行下列步骤。
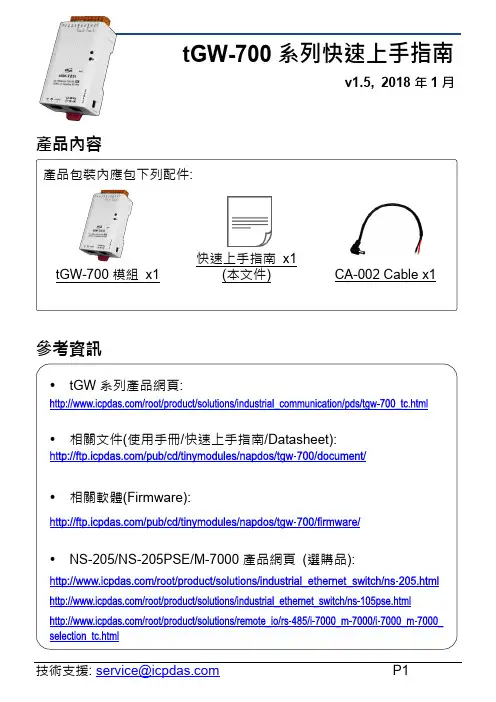
tGW-700系列快速上手指南v1.5, 2018年1月產品內容參考資訊產品包裝內應包下列配件:tGW-700模組 x1快速上手指南 x1(本文件) CA-002 Cable x1•tGW 系列產品網頁:•相關文件(使用手冊/快速上手指南/Datasheet):•相關軟體(Firmware): •NS-205/NS-205PSE/M-7000產品網頁 (選購品):1 連接電源及電腦主機1) 確認您電腦的網路設定正確且可運作。
確認您電腦的Windows 防火牆以及Anti-virus 防火牆都已關閉,或已正確的設定,否則第5章部份的“Search Servers”可能無法正確找到tGW-700。
(請與您的系統管理員確認)2) 將tGW-700與電腦接至同一個集線器(Hub/Switch ) 或同一個子網域。
3) 提供電源(使用PoE 或+12 ~ +48 V DC電源) 到tGW-700。
2 安裝軟體到您的電腦安裝eSearch Utility,可從從泓格科技網站下載。
詳細位置如下:/pub/cd/tinymodules/napdos/software/esearch/3 腳位定義及接線注意☑: 本文件是以RS-232及RS-485接線為範例。
RxD TxD TxD RxD GND GND RTS CTS CTS RTS TxD+RxD+ TxD- RxD- RxD+ TxD+ RxD- TxD- GND GNDData+ Data+ Data- Data- GND GND4連接Modbus 設備1) 將Modbus 設備 (如: M-7022,選購品) 連接至tGW-700 的COM1。
2) 提供電源到Modbus 設備 (如:M-7022,設備ID:1)。
注意: 接線及供電方式,請依據您的 Modbus 設備為準。
RS-485 接線RS-232接線←←5配置正確的網路設定1) 雙擊桌面上 eSearch Utility 捷徑圖示。
快速指南●简介本篇使用者指引手册主要目的是要教导使用者如何快速又方便的使用PROFI-8855到你们的应用范例上,因此只提供简单的操作说明。
若需要更详尽的使用说明,请参考在ICP DAS光盘中或ICP DAS网页上的PROFI-8855的使用者手册。
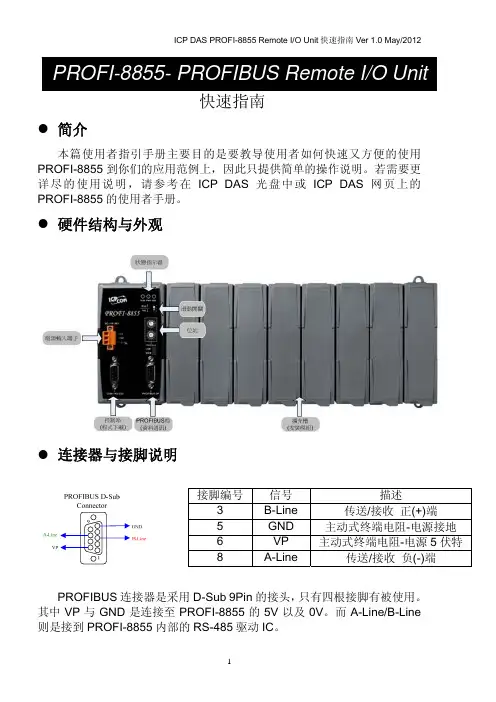
●硬件结构与外观●连接器与接脚说明PROFIBUS连接器是采用D-Sub 9Pin的接头,只有四根接脚有被使用。
其中VP与GND是连接至PROFI-8855的5V以及0V。
而A-Line/B-Line则是接到PROFI-8855内部的RS-485驱动IC。
接脚编号信号描述3 B-Line 传送/接收正(+)端5 GND主动式终端电阻-电源接地6 VP主动式终端电阻-电源5伏特8 A-Line 传送/接收负(-)端状态指示LEDPROFI-8855提供了三个状态显示LED,分别是PWR(黄色)、ERR(红色)与RUN(绿色)。
当PROFI-8855开机时,PWR灯会亮起;在参数化以及规划的过程中,ERR灯会亮起;进入数据交换模式后,RUN的灯号就会亮起,ERR的灯号会熄灭。
以下是状态指示LED的联机状态表。
状态指示器状态叙述除错方针ERR-亮(ON) &RUN-灭(OFF)PROFI-8855尚未联机(Offline Mode*)检查主端设定的PROFI-8855 节点地址是否与的旋转开关一致。
ERR-快速闪烁(每隔0.1秒)PROFI-8855速率已侦测(Stop Mode*)设定Master进入OperateMode或Clear Mode ERR-每隔0.5秒闪烁PROFI-8855参数数据错误安装与设定不符(注1) ERR-每隔1秒闪烁 PROFI-8855规划数据错误安装与设定不符(注2) ERR-亮(ON) &RUN-亮(ON)PROFI-8855 清除模式(Clear Mode*)改变主端的模式从ClearMode到Operate Mode ERR-灭(OFF) &RUN-亮(ON)PROFI-8855数据交换模式(Operate Mode*)PWR-每隔1秒闪烁模块脱机确认模块是否故障并更换终端电阻为了减少信息在PROFIBUS 总线(总线)上的反射效应,PROFIBUS 总线上需安装终端电阻于起始与结束站台上,其电阻配置请参照上图所示,VP 接至5伏特电源,GND 接至电源0伏特。
PCI-P8R8/P16R16/P16C16/P16POR16用户手册承诺郑重承诺:凡泓格科技股份有限公司产品从购买即日起一年内无任何材料性缺损。
免责声明凡使用本系列产品除产品质量所造成的损害,泓格科技股份有限公司不承担任何法律责任。
泓格科技股份有限公司有义务提供本系列产品可靠而详尽资料,但保留修订权利,且不承担使用者非法利用资料对第三方所造成侵害构成的法律责任。
版权版权所有 © 1999泓格科技股份有限公司,保留所有权力。
商标手册中所涉及所有公司商标,商标名称及产品名称分别属于该商标或名称的拥有者所有。
许可用户可以使用、修改和备份单片机上的软件部份,但无权复制,转移或发布该软件的全部或部份拷贝。
目录1绪论 (1)1.1. 特点和应用 (2)1.1.1.特点 (2)1.1.2.应用 (2)1.2. 结构图 (3)1.3. 规格 (4)1.4. 硬件结构 (6)1.4.1.住流拆封 (6)1.4.2.板卡布局 (7)1.4.3.跳线设置 (9)1.5. 引脚分配 (10)2硬件应用 (13)2.1 继电器输出 (13)2.2 集电极输出 (14)2.3 P HOTO M OS 继电器输出 (15)2.4 隔离输入 (16)3软件安装向导 (18)3.1 W INDOWS 95/98/2000/XP平台安装 (18)3.2 DOS平台安装 (26)3.3 WINDOWS95/98/NT/2000/XP平台安装 (26)4I/O控制寄存器 (27)4.1 调用功能P16R16.DLL (32)4.2 P16R16.H (32)4.3 PCI_F LOAT S UB2 (33)4.4 PCI_S HORT S UB2 (34)4.5 PCI_G ET D LL V ERSION (34)4.6 PCI_D RIVERLNIT (35)4.7 PCI_D RIVER C LOSE (37)4.8 PCI_G ET D RIVER V ERSION (37)4.9 PCI_G ET C ONGFIG A DDRESS S PACE (38)4.10 P16R16_DO (39)4.11 P16R16_DI (39)4.12 8R8_DO (43)4.13 P8R8_DI (43)1 绪论型号数字量隔离输入输出类型通道继电器输出PCI-P8R8 8通道8PCI-P16R16 16 通道 16 通道继电器输出通道源OC门输出PCI-P16C16 16 通道16通道 PhotoMos继电器输出PCI-P16POR16 16 通道16•PCI-P8R8 / PCI-P16R16PCI-P16R16和PCI-P8R8适用于工控机上或于之相容的PC机。
ECAT-2000 系列EtherCAT 從站I/O 模組使用手冊繁體中文 1.9版本, 2019年 09月承諾鄭重承諾: 凡泓格科技股份有限公司產品從購買後,開始享有一年保固,除人為使用不當的因素除外。
責任聲明凡使用本系列產品除產品品質所造成的損害,泓格科技股份有限公司不承擔任何的法律責任。
泓格科技股份有限公司有義務提供本系列產品詳細使用資料,本使用手冊所提及的產品規格或相關資訊,泓格科技保留所有修訂之權利,本使用手冊所提及之產品規格或相關資訊有任何修改或變更時,恕不另行通知,本產品不承擔使用者非法利用資料對第三方所造成侵害構成的法律責任,未事先經由泓格科技書面允許,不得以任何形式複製、修改、轉載、傳送或出版使用手冊內容。
版權版權所有 © 2018 泓格科技股份有限公司,保留所有權利。
商標文件中所涉及所有公司的商標,商標名稱及產品名稱分別屬於該商標或名稱的擁有者所持有。
聯繫我們如有任何問題歡迎聯繫我們,我們將會為您提供完善的咨詢服務。
Email:支援ECAT-2024/2028 ECAT-2045/2045-32ECAT-2050/2051/2051-32 ECAT-2052/2052-NPN ECAT-2053/2055/2055-32ECAT-2057/2057-NPN/2057-8P8N/2057-32 ECAT-2060 ECAT-2061目錄1.簡介 (4)1.1配件清單 (5)1.2產品資訊 (7)1.3選型指南 (9)2.硬體資訊 (11)2.1配置圖 (11)2.2規格 (15)2.2.1系統規格 (15)2.2.2I/O規格 (16)ECAT-2024/2028 (16)ECAT-2045/2045-32 (16)ECAT-2051/2051-32 (16)ECAT-2052/2052-NPN (17)ECAT-2053 (17)ECAT-2055/2055-32 (18)ECAT-2057/2057-NPN/2057-8P8N (18)ECAT-2057-32 (19)ECAT-2050 (19)ECAT-2060/2061 (20)2.3腳位定義 (21)EtherCAT介面 (21)ECAT-2024 (21)ECAT-2028 (21)ECAT-2045/2057/2057-NPN/2057-8P8N (22)ECAT-2051 (22)ECAT-2052/2052-NPN (22)ECAT-2053 (23)ECAT-2055 (23)ECAT-2060 (23)ECAT-2050 (25)ECAT-2045-32/2057-32 (25)ECAT-2051-32 (26)ECAT-2055-32 (26)ECAT-2061 (27)2.4接線圖 (28)輸入接線 (28)輸出接線 (29)2.5信號線連接至模組連接器 (30)2.6機構圖 (32)ECAT-2024/2028/2045/2050/2051/2052/2053/2055/2057/2060 系列 (32)ECAT-2045-32/2051-32/2055-32/2057-32/2061 系列 (32)3.啟用ECAT-2000模組 (33)3.1連接主站與電源 (33)3.2配置運作模式 (35)進入至EtherCAT網路 (35)4.OBJECT 說明及參數設定 (37)4.1標準O BJECT(0X1000-0X1FFF) (37)[ALL]Index 1000 Device Type (37)[ALL]Index 1008 Device Name (37)[ALL]Index 1009 Hardware Version (39)[ALL]Index 100A Software Version (39)[ALL]Index 1018 Identity (39)[ECAT-2050]Index 160n(0<=n<=3) DO Outputs Process Data Mapping (41)[ECAT-2055-32]Index 1600 DO Outputs Process Data Mapping (41)[ECAT-2045-32/2057-32]Index 1600 DO Outputs Process Data Mapping (42)[ECAT-2024/2028]Index 160n AO Outputs Process Data Mapping (43)[ECAT-2050]Index 1A0n(0<=n<=C) DI Outputs Process Data Mapping (43)[ECAT-2055-32]Index 1A00 DI Outputs Process Data Mapping (43)[ECAT-2051-32]Index 1A00 DI Outputs Process Data Mapping (44)[ALL]Index 1C00 Sync Manager Type (45)[ECAT-2050]Index 1C12 SyncManager 2 Assignment (45)[ECAT-2055-32/2045-32/2057-32]Index 1C12 SyncManager 2 Assignment (45)[ECAT-2024/2028]Index 1C12 SyncManager 2 Assignment (45)[ECAT-2055-32/2051-32]Index 1C13 SyncManager 3 Assignment (46)[ECAT-2050]Index 1C13 SyncManager 3 Assignment (46)4.2特定O BJECTS(0X6000-0X7FFF) (47)[ECAT-2050]Index 60n0(0<=n<=C) Digital Inputs (47)[ECAT-2055-32]Index 6000 Digital Inputs (47)[ECAT-2051-32]Index 6000 Digital Inputs (48)[ECAT-2050]Index 70n0(0<=n<=C) Digital Outputs (49)[ECAT-2055-32]Index 7000 Digital Outputs (49)[ECAT-2045-32/2057-32]Index 7000 Digital Outputs (50)[ECAT-2024/2028]Index 70n0 AO Outputs Channel (51)4.3特定O BJECTS(0X8000-0X8FFF) (51)ECAT-2024/2028處理資料流程圖 (51)校正計算 (52)[ECAT-2024/2028]Index 80n0 AO Channel Settings (54)[ECAT-2024/2028]Index 80nE AO Channel Internal Data (55)[ECAT-2024/2028]Index 80nF AO Channel Internal Data (55)附錄: 手冊修訂記錄 (56)1.簡介ECAT-2000 系列是工業EtherCAT Slave 遠端I/O 模組且支援了EtherCAT 協定,還能夠建構Daisy Chain 網路拓撲(如,星形、線形或環形),可簡化線路配置與維護的複雜度,降低佈線成本與交換器的需求,使安裝更具靈活性。
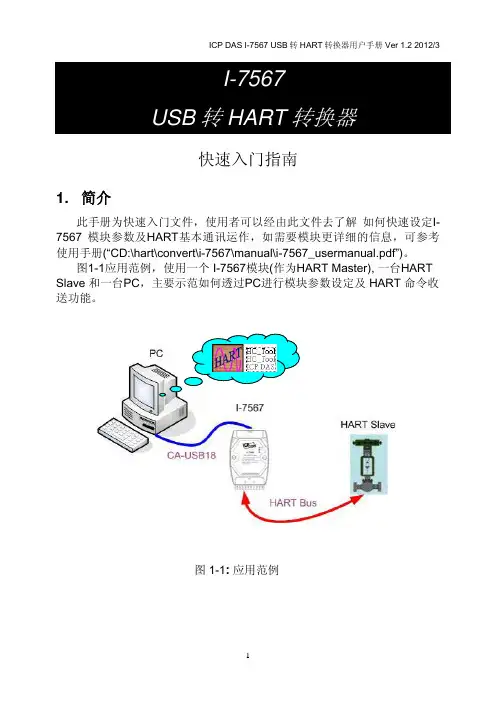
快速入门指南1. 简介本手册将介绍I-7565-H1/ I-7565-H2模块的快速及简易使用方法。
手册仅提供基本的操作指南;若您需要更详细操作说明文件,可在随机附赠的光盘中找到,或至泓格科技公司网站取得。
(/products/Remote_IO/can_bus/i-7565-H1H2.htm)为了帮助使用者快速地熟悉I-7565-H1/H2模块。
在此,我们使用二个I-7565-H1模块(分别为I-7565-H1_(A)与I-7565-H1_(B))来展示如何操作I-7565-H1模块。
其范例网络架构如下图所示:图 1-1:展示范例之网络架构2. 硬件安装在实际应用之前需先确认各项硬件的设定,详细的说明如下列步骤所示:[ 步骤1: USB 传输线与安装I-7565-H1驱动程序 ]分别将I-7565-H1_(A)与I-7565-H1_(B)以USB 传输线链接到计算机的USB 端口上。
然后,您可以参阅使用者手册的“Driver Installation”章节,以顺利完成I-7565-H1驱动程序的安装。
[ 步骤2: 启用模块A 与B 的120Ω终端电阻 ]请打开I-7565-H1的背板,确认JP3 jumper 是否像图2-1所示,在位置1与位置2上。
图 2-1: JP3 Jumper 位置[ 步骤3: CAN 总线的连接 ]将两个I-7565-H1模块(A 与B)的CAN 口,以图2-2的连接形式连接。
图 2-2: CAN 总线的连接 致能端子(默认值=启用)3. 使用I-7565-H1/H2 Utility测试I-7565-H1步骤1:将I-7565-H1_A 与I-7565-H1_B背面的Init/Normal开关调整至”Normal”的位置,然后打开DC电源供应器。
I-7565-H1_A 与I-7565-H1_B的电源指示灯(PWR Led)将亮起,代表二个I-7565-H1转换器模块在“Firmware Operation”模式下正常动作。
ECAT-2094SEtherCAT4軸步進馬達控制器/驅動器使用手冊(Version 1.3.1)承諾鄭重承諾: 凡泓格科技股份有限公司產品從購買後,開始享有一年保固,除人為使用不當的因素除外。
責任聲明凡使用本系列產品除產品品質所造成的損害,泓格科技股份有限公司不承擔任何的法律責任。
泓格科技股份有限公司有義務提供本系列產品詳細使用資料,本使用手冊所提及的產品規格或相關資訊,泓格科技保留所有修訂之權利,本使用手冊所提及之產品規格或相關資訊有任何修改或變更時,恕不另行通知,本產品不承擔使用者非法利用資料對第三方所造成侵害構成的法律責任,未事先經由泓格科技書面允許,不得以任何形式複製、修改、轉載、傳送或出版使用手冊內容。
版權版權所有 © 2017 泓格科技股份有限公司,保留所有權利。
商標文件中所涉及所有公司的商標,商標名稱及產品名稱分別屬於該商標或名稱的擁有者所持有。
聯繫我們如有任何問題歡迎聯繫我們,我們將會為您提供完善的咨詢服務。
Email:******************,************************修訂紀錄版本日期說明Author 1.00 05.09.2018 初始版本M.K. 1.0.1 13.05.2020 更新規格M.K.M.K. 1.0.2 19.05.2020 修改馬達電源的連接介面說明(表格 5)修改供貨範圍M.K. 1.2.0 16.09.2020 •加減速單位與類型•錯誤列表•供應商專用暫存器•修改馬達電壓範圍M.K. 1.2.1 25.01.2021 •更新 "開路集極接線圖"•加速/減速單位:▪增加 "current to target"▪更新V-T圖形•更新錯誤表•增加"Target overrun"•增加相對位置的動態變化範例M.K 1.2.2 20.07.2021 •韌體版本 1.6•增加以下物件:▪Target overrun▪Initialization errorEric Chen 1.3.0 25.05.2022 •硬體變更,增加下列功能:▪別名旋鈕定址▪透過FoE更新韌體•韌體版本2.0•增加" Station Alias"1.3.1 10.03.2023 •修改連接介面的PGND標示Eric ChenContents1 產品概述 (3)1.1 簡介 (3)1.2 技術數據 (4)1.3 硬體規格 (5)1.4 外型尺寸 (6)2 供貨範圍 (7)3 接線 (9)3.1 LED燈定義 (9)3.2 旋鈕定義 (11)3.3 連接介面 (11)3.4 數位輸入與輸出接線 (14)3.5 步進馬達接線 (17)3.5.1 四線式馬達 (17)3.5.2 八線式馬達 (18)3.5.3 編碼器接線 (19)4 基礎通訊 (21)4.1 EtherCAT 佈線 (21)4.2 狀態機 (21)4.3 同步模式 (23)4.3.1 自由運行模式 (23)4.3.2 DC同步模式 (24)5 專案整合 (27)5.1 ESI 檔案 (27)5.1.1 匯入 ESI檔案 (27)5.2 安裝與設定 (28)5.2.1 掃描EtherCAT裝置 (28)5.2.2 EtherCAT從站進程數據設定 (30)5.2.3 基本步進驅動器配置 (31)5.3 更新韌體 (33)6 位置控制設定 (35)6.1 位置介面類型 (35)6.2 Positioning Interface (35)6.2.1 加減速單位定義 (44)6.2.1.1 從Vmin 到 Vmax的加速時間 (45)6.2.1.2 從Vmin 到 Vtarget的加速時間 (46)6.2.1.3 加速度 [128*微步/秒2] (48)6.2.1.4 從Vcurrent 到 Vtarget的加速時間 (49)6.2.2 加速度/減速度類型 (50)6.2.2.1 Start-Stop Phase Type (50)6.2.2.2 Standard Acceleration/Deceleration (52)6.3 Positioning Interface Compact (52)6.4 Position Control (57)7速度控制設定 (61)8 CoE介面 (64)8.1 概述 (64)8.2 儲存設置數據到記憶體 (65)8.3 驅動器調適 (68)9物件描述與參數化 (70)9.1 標準物件 (70)9.2 RxPDO Mapping Objects (71)9.3 TxPDO Mapping Objects (73)9.4 Sync Manager Objects (78)9.5 Input Data (82)9.6 Output Data (84)9.7 Configuration Data (87)9.8 Driver Tuning Functions (92)9.9 Information and Diagnostic Data (93)9.10 Configuration Parameters Storage (94)9.11 Station alias Configuration (95)10 錯誤列表 (96)11 供應商特定暫存器定義 (96)1產品概述1.1簡介ECAT-2094S步進馬達控制器是一款高效且經濟實惠的兩相雙極步進驅動器,可同時控制最多4個步進馬達。
快速入门指南1. 介绍本手册将介绍I-7540D 的快速及简易使用方法,本手册仅提供基本的操作指南。
您若对I-7540D 需要更详细操作说明,请参阅 ICPDAS 光盘(Fieldbus_CD:\CAN\Converter\I-7540D\manual)或至ICPDAS 网站中(/products/Remote_IO/can_bus/i-7540.htm)取得I-7540D 使用手册。
我们帮助用户快速地熟悉以太网络(Ethernet)与CAN 之间信号转换器。
在此,使用二个I-7540D 模块 (分别为I-7540D_A 与I-7540D_B)来说明如何操作I-7540D 模块。
2. 硬件安装在操作之前,用户需确认各个装置之间的链接,详细说明如下:Step 1: 终端电阻的设定在模块A 及B 设定120Ω(奥姆)之终端电阻。
注意:如果您已改变出厂的默认值,请打开I-7540D 模块外壳并且将内部JP3 Jumper 调至Enable。
(JP3预设为Enable)Step 2: 与电源供应器的连结将I-7530A_A 与I-7530A_B 的电源(+VS-图中红线)与接地(GND-图中黑线)接脚连接至直流电源供应器(10~30VDC)。
Step 3: 与以太网络的连接使用两条标准规格的网络线,分别将I-7540D_A 、I-7540D_B 和计算机的网络配接卡(NIC)连接至同一个集线器(Hub)上。
Step 4: 与CAN 总线的连接连接二个I-7540D 模块的CAN 接脚,请依照下图结构所示连接:Enable (default), (Activate)3. I-7540D 参数配置在测试I-7540D转换器之前,使用者需藉由I-7540D工具软件(可在附赠光盘找到)来配置网络与CAN的参数,其详细程序如下所述:Step 1:I-7540D的网络参数默认值如下:IP地址: 192.168.255.1网络屏蔽(Mask): 255.255.0.0网关(Gateway): 192.168.0.1在与I-7540D通讯之前,必须确认计算机与I-7540D同在一个局域网络下(LAN)。