滑移线理论及应用
- 格式:ppt
- 大小:3.76 MB
- 文档页数:42
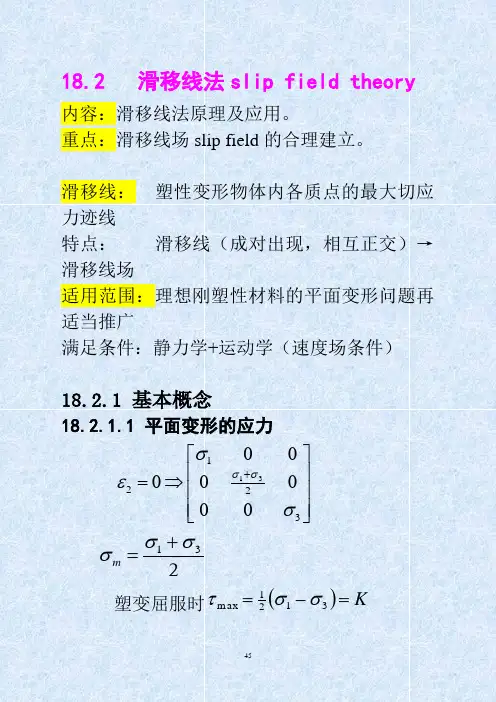
18.2 滑移线法slip field theory内容:滑移线法原理及应用。
重点:滑移线场slip field 的合理建立。
滑移线: 塑性变形物体内各质点的最大切应力迹线特点: 滑移线(成对出现,相互正交)→滑移线场适用范围:理想刚塑性材料的平面变形问题再适当推广满足条件:静力学+运动学(速度场条件)18.2.1 基本概念18.2.1.1 平面变形的应力⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⇒=+3212000000031σσεσσ231σσσ+=m塑变屈服时()K =-=3121max σστ莫尔圆为:⎪⎩⎪⎨⎧±=+=-=ωτωσσωσσ2cos 2sin 2sin k k k xym y m x ⎪⎩⎪⎨⎧-==+==k k m mm σσσσσσω32145时18.2.2 最大切应力迹线——滑移线变形平面xoy ,取点P 1及邻近点P 2,P 3,……P 61τ为P 1点最大切应力方向2τ为P 2点的(1τ为P 1P 2折线)当P 1P 2无限邻近时,曲线变为光滑曲线即滑移线。
α族,β族18.2.2.1 ωβα及.1)逆时针方向线组成顺时针方向族线西侧的最大切应力,.βα 图7-32)角方向成线为线4531σσβα3)()同坐标轴逆时针正轴正向为起始顺时针负角以,ox ω18.2.2.2 滑移线方程()()⎪⎩⎪⎨⎧-=+==族βωωωπctg tg tg dxdy dx dy 2Hencky 方程:ωσ~m平面应变应力平衡微分方程为:⎪⎩⎪⎨⎧=+=+∂∂∂∂∂∂∂∂00yxy x y y x x y xσττσ将屈服准则式代入有()⎪⎪⎩⎪⎪⎨⎧=--∂∂=+-∂∂∂∂∂∂∂∂∂∂02cos 2sin 20)2sin 2(cos 2yx m y x m k y k x ωωωωωωσωωσ 未知数:m σ,ω,但难求。
变换坐标系:取滑移线本身作坐标轴轴轴βα,注意:此坐标系具有当沿α线运动时β值不变,即坐标系轴是弯曲的!在α点无限近处有:0=ω αds dx = βds dy =αs x ∂∂=∂∂βs y ∂∂=∂∂0≠∂∂αωs 0≠∂∂βωs 因此变为:()线线βωσαωσββαα02)(02=∂∂+∂∂=∂∂-∂∂s k s s k s m m积分后得:()()⎩⎨⎧=+=-线线βηωσαξωσk k m m 22此式即汉基应力方程(Hencky )18.2.3 滑移线特性18.2.3.1 沿线特性沿α线:ωσ∆=∆k m 2 沿β线:ωσ∆-=∆k m 2证:设一条α线上有a 、b 两点ξωσξωσ=-=-b mb a ma k k 22 ()02=---∴b a mb ma k ωωσσωσ∆=∆∴k m 218.2.3.2 跨线特性()()⎩⎨⎧∆=∆∆=∆C B m D A m BC AD ,σσωω, 证明:先沿α线,A →B 有B B m A mA k K ωωσσ22-=-沿β线B →C 有:c mc B mB k k ωωσσ22+=+ ()c A B mA mc k ωωωσσ--=-∴22(a ) 再沿A →D (β1线)D mD A mA k k ωσσω22+=+D →C (沿线2α)c mc D mD k k ωωσσ22-=-()D C A mA mc k ωωωσσ22-+=-∴(b ) 由于a,b 式相等D B B A ωωωω+=+∴或:B c A D ωωωω-=-⎪⎭⎪⎬⎫-=-∆=∆mB mC mA mD BC AD σσσσωω:同理可证即上式即汉基第一定理即在滑移线网格中,若已知三个结点的m σ、ω值则第四个结点m σ、ω值可以求出。
滑移线名词解释滑移线是指在流体力学中,流体流动时,流体中的某一点随着时间的推移而发生位置变化的线。
这个概念在飞行器设计中非常重要,因为滑移线可以用来描述飞行器的稳定性和控制性能。
在本文中,我们将详细解释滑移线的概念、特性和应用。
一、滑移线的概念滑移线是在流体力学中用来描述流体流动的一种线。
在飞行器设计中,滑移线通常指飞行器中心重心和气动中心之间的一条线。
当飞行器受到外界扰动时,它会发生滑移和偏航运动,滑移线的位置和方向可以用来描述飞行器的运动状态。
二、滑移线的特性1. 滑移线的位置滑移线的位置取决于飞行器的气动特性和重心位置。
在大多数情况下,滑移线位于飞行器的重心前方,因为气动中心通常在重心前面。
滑移线的位置可以通过实验和计算得出,对于不同的飞行器来说,滑移线的位置也不同。
2. 滑移线的方向滑移线的方向取决于飞行器的气动特性和机翼的布局。
在大多数情况下,滑移线与机翼的平面垂直,因为机翼产生的升力和阻力一般都在机翼平面内。
然而,对于某些机翼布局不规则的飞行器,滑移线的方向可能会产生变化。
3. 滑移线的稳定性滑移线的稳定性是指飞行器在受到外界扰动时,滑移线的位置和方向是否会发生变化。
在理想情况下,飞行器应该具有稳定的滑移线,即受到扰动时滑移线的位置和方向不会发生明显变化。
如果滑移线不稳定,飞行器就会变得难以控制,甚至容易失控。
三、滑移线的应用1. 飞行器稳定性分析滑移线可以用来分析飞行器的稳定性和控制性能。
通过测量飞行器的滑移线位置和方向,可以判断飞行器的稳定性是否良好,以及是否需要进行调整。
2. 飞行器控制设计滑移线还可以用来设计飞行器的控制系统。
通过控制飞行器的滑移线位置和方向,可以使飞行器保持稳定,避免发生滑移和偏航运动,从而提高飞行器的控制性能。
3. 飞行器改进设计滑移线还可以用来指导飞行器的改进设计。
通过分析飞行器的滑移线位置和方向,可以发现飞行器存在的问题和缺陷,从而提出改进措施,使飞行器更加稳定和安全。