单片机测相位11
- 格式:ppt
- 大小:304.00 KB
- 文档页数:9

![基于单片机的智能rlc测试仪的设计【毕业设计论文】[管理资料]](https://img.taocdn.com/s1/m/58b261d05901020206409c61.png)
基于单片机智能RLC测试仪的设计毕业设计摘要本文主要论述了基于凌阳SPCE061A单片机的智能RLC测试仪的设计,利用单片机对R、L、C等参数进行测量,可以充分利用单片机的运算和控制功能,方便地实现测量,使测量精度得到提高。
同时用软件程序代替一些硬件测量电路,可在硬件结构不变的情况下,修改软件以增加新的功能。
能够很好的完成对RLC参数的测量,以满足现代测控系统的需要。
关键词:单片机;SPCE061A;RLC测试仪ABSTRACTIt is mainly discussed in this paper that the design of intellectual RLC parameter measurer based on Lingyang SPCE061A MCU. MCU use of R, L, C, and other parameters measured, can take full advantage of MCU processing and control functions, to facilitate the realization of measurements for improved measurement accuracy. Simultaneously uses the software procedure to replace some hardware metering circuits, may in the hardware architecture invariable situation, revi se software to increase the new very good completing to the RLC parameter survey, satisfy the modern observation and control system the need.Keywords: MCU;SPCE061A;RLC testing device目录摘要 (I)ABSTRACT (II)目录 (III)前言 (V)1 系统测试原理与总体方案设计 (1)RLC测试原理 (1)相位+有效值测量 (1)相位+有效值测量方案的软仿真 (2)RLC参数测量方法 (3)总体设计方案 (4)系统原理框图 (4)整个系统工作流程 (4)系统设计中的难点和关键技术 (5)2 RLC测试仪硬件部分实现 (6)-5V电源的设计 (6)标准正弦信号发生模块 (6)标准正弦信号的原理 (6)AD9850芯片简介 (8)AD9850硬件电路图及单片机程序 (9)3 I-V变换模块 (11)I-V变换方案设计 (11)I-V变换的硬件电路 (11)4 同时采样模块 (12)同时采样模块方案设计 (12)A/D芯片的选择 (12)ADS7861芯片介绍 (13)ADS7861转换时序的逻辑控制 (13)5 单片机系统设计 (16)SPCE061A单片机概述 (16)单片机的电源设计 (16)SPCE061A最小系统 (17)6 RLC测试仪应用软件设计 (18)数据采集模块程序流程图 (18)中断程序流程图 (19)主程序流程图 (19)结论 (21)参考文献 (22)致谢 (23)附录 (24)前言随着微电子技术、计算机技术、软件技术的高度发展及其在电子测量技术与仪器上的应用,新的测试理论、新的测试方法、新的测试领域以及新的仪器结构不断出现,在许多方面已经冲破了传统仪器的概念,电子测量仪器的功能和作用发生了质的变化。
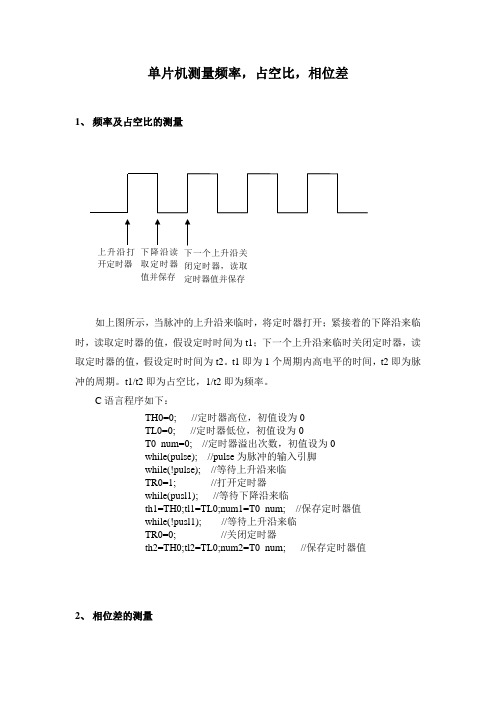
单片机测量频率,占空比,相位差1、 频率及占空比的测量如上图所示,当脉冲的上升沿来临时,将定时器打开;紧接着的下降沿来临时,读取定时器的值,假设定时时间为t1;下一个上升沿来临时关闭定时器,读取定时器的值,假设定时时间为t2。
t1即为1个周期内高电平的时间,t2即为脉冲的周期。
t1/t2即为占空比,1/t2即为频率。
C 语言程序如下:TH0=0; //定时器高位,初值设为0TL0=0; //定时器低位,初值设为0T0_num=0; //定时器溢出次数,初值设为0while(pulse); //pulse 为脉冲的输入引脚while(!pulse); //等待上升沿来临TR0=1; //打开定时器while(pusl1); //等待下降沿来临th1=TH0;tl1=TL0;num1=T0_num; //保存定时器值while(!pusl1); //等待上升沿来临TR0=0; //关闭定时器th2=TH0;tl2=TL0;num2=T0_num; //保存定时器值2、 相位差的测量上升沿打开定时器 下降沿读取定时器值并保存 下一个上升沿关闭定时器,读取定时器值并保存测量相位差的电路如上所示,待测量的两路脉冲分别作为两个D触发器的时钟输入,两个D触发器的输入端D及S端都接高电平,第一个D触发器的输出接第二个D触发器的R端,第二个D触发器的互补输出端接第一个D触发器的R端。
从下面的波形图可以看出,第一个D触发器输出的脉冲信号的占空比乘以2π即为相位差。
这样就将测量两路方波信号的相位差转化为测量一路方波信号的占空比,就可以按照前面介绍的测量占空比的方法来测量了。
黄色的波形为脉冲1,蓝色的波形为脉冲2,红色的波形为相位差。

基于单片机的GPS定位系统设计摘要GPS是全球定位系统英文名词Global Positioning System的缩写.该系统是美国布设的第二代卫星无线电导航系统。
它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息.其目的是在全球范围内对地面和空中目标进行准确定位和监测。
现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
本设计是基于AT89C51单片机来实现的简易GPS定位信息显示系统。
本控制系统主要完成接受数据、时间显示、经度显示、纬度显示等常规功能.此方案基于单片机、GPS模块和12864液晶显示屏等硬件,并应用C语言实现了GPS信号的提取、显示及基本的键盘控制操作等。
经过实践测试,这种接收机可以达到基本GPS信息的接收以及显示,可以做到体积小、精度高、连续导航,并可广泛应用于个人野外旅游探险、出租汽车定位及海上作业等领域。
关键词:GPS定位系统,单片机,液晶显示屏DESIGN OF GPS RECEIVER BASED ON 51 SINGLE CHIPCOMPUTERABSTRACTGPS is the abbreviation of the English term Global Positioning System global positioning system. The system is the United States laid the second generation satellite radio navigation system. It can provide users with continuous, real—time,global, round—the—clock,high precision three dimensional coordinates, three velocity and time information. Aimed at targets on the ground and in the air around the world an accurate positioning and monitoring。

单片机引脚阻抗测量方法1.引言1.1 概述概述部分提供了关于单片机引脚阻抗测量方法的总体介绍。
它将简要描述本文的主题和重要性,并提供一个概览,使读者对下面的内容有一个整体的理解。
概述:引脚阻抗测量方法单片机是一种集成电路,具有多个引脚用于输入和输出数据、信号和电源。
在设计和开发电子设备时,对单片机引脚的阻抗进行测量是非常重要的。
对引脚阻抗的准确了解可以帮助我们更好地了解引脚对电路性能的影响,并采取相应的措施来优化和改进电路设计。
本文将介绍两种常用的单片机引脚阻抗测量方法。
这些方法包括使用测试电路和测量设备来测量引脚电阻和电容的方法。
通过这些测量,我们可以获得引脚的电气特性,如阻抗大小、频率响应和相位差等。
这些数据对于电路设计和性能评估至关重要。
在接下来的部分中,我们将详细介绍每种方法的原理和步骤,并比较它们的优缺点。
我们还将探讨一些常见问题和技巧,以确保准确、可靠和一致的测量结果。
通过本文的阅读,读者将对单片机引脚的阻抗测量方法有一个全面的了解。
这将有助于他们在实际应用中更好地理解和解决与引脚阻抗相关的问题,并优化他们的电路设计。
同时,本文也有助于丰富和扩展这一领域的研究和应用。
在下一节中,我们将开始详细介绍第一种阻抗测量方法。
1.2文章结构文章结构部分的内容可以是:本文主要分为三个部分,分别是引言、正文和结论。
引言部分包括概述、文章结构和目的三个小节。
在概述中,我们介绍了单片机引脚阻抗测量方法的重要性和应用背景。
接着,在文章结构中我们简要概括了本文的整体结构,以引导读者对文章内容有一个整体的认知。
最后,在目的部分我们明确了本文的研究目标,即介绍单片机引脚阻抗测量的两种方法及其应用。
正文部分主要介绍了两种阻抗测量方法。
每种方法都详细描述了其原理、步骤和实验验证。
在阻抗测量方法一的部分,我们详细介绍了其原理和使用场景,并给出了具体的实验步骤和测量结果。
在阻抗测量方法二的部分,我们同样进行了详细的介绍和实验验证。
同频正弦信号间相位差测量的设计[导读]介绍了以单片机为核心,通过倍频电路实现的两同频正弦信号相位差测量的设计,并对该系统的硬、软件作了比较详尽的阐述。
关键词:信号介绍了以单片机为核心,通过倍频电路实现的两同频正弦信号相位差测量的设计,并对该系统的硬、软件作了比较详尽的阐述。
关键词:单片机,倍频电路,相位差1 引言本设计目的在于测量出任意两相同频率正弦信号之间的相位差,并将测量结果以数字形式显示出来。
具体实现方法为:先通过比较电路将两路同频信号分别转换为相应的脉冲信号,然后将其中的一路信号通过反相器取反后与另一路信号相与,得到一等脉宽的脉冲波形,此脉冲波形的脉宽t,即表示两信号的相位差。
将原信号对应的任意一路脉冲信号(周期为T)倍频后,作为单片机计数器的计数脉冲,并对相位差脉冲记数,得记数值为W。
设倍频电路的倍频系数为A,则记数脉冲周期为T/A,可得到两信号相位差角计算公式如下:其中N=360/A,N为常数,是相位测量系统的最小精确度。
经过单片机系统编程即可实现此简单运算式,并将运算结果Q送LED显示。
原理框图如图1所示。
2 系统硬件电路原理分析与设计整个系统硬件电路由比较整形电路、倍频电路、单片机AT89C51及显示电路组成。
2.1 比较整形电路电路采用电压比较器LM339。
LM339内有4个电压比较器,取其中的两个比较器即可。
两路信号分别接两个比较器同相输入端,将反相输入端接地,即构成过零比较电路。
两比较器输出即转换为脉冲信号。
将其中一路脉冲通过反相器CC4069取反后与另一路信号通过与门CC4081相与,可得一等脉宽的脉冲信号,此脉宽即记载着两输入信号之间的相位差,我们称之为相位差脉宽。
转换过程见图2。
2.2 倍频电路由相位差计算公式可知,倍频系数A越大,测量精度就越高,测量越准确。
本电路采用A=720的倍频电路,因此相位测量精度为N=360/720=0.5°,可以满足实际需要。
倍频电路由锁相环集成电路CC4046和双BCD(Binary-Coded DecimalNotation)同步加法计数器CC4518组成。
单片机判断相序判断电源中的三相电流的相序对于电力系统的稳定运行非常重要。
在单片机中,可以通过测量电流的相位差和幅值等信息来判断三相电流的相序。
以下是一个简单的方法:1.测量相位差:•使用单片机的定时器来测量三个电流波形的相位差。
相位差是每个相电流波形的起始点之间的角度差。
可以使用定时器的输入捕获功能来记录每个相电流波形的上升沿或下降沿的时间戳。
2.计算相序:•根据相位差的大小和顺序,判断电流的相序。
具体的判断方法取决于系统的具体要求,但通常可以通过比较相邻相位差的大小来确定相序。
3.测量电流幅值:•可以通过使用电流传感器(例如霍尔效应传感器)来测量电流的幅值。
这有助于区分电流的正负方向,从而确定相序。
4.使用相序检测电路:•除了通过软件测量相位差和幅值外,还可以设计硬件电路用于检测相序。
这可能包括比较器、放大器等电路。
以下是一个简化的伪代码示例:// 伪代码示例,具体实现取决于使用的单片机和传感器// 定义变量uint32_t timestamp_A, timestamp_B, timestamp_C;double phase_difference_AB, phase_difference_BC,phase_difference_CA;// 获取时间戳timestamp_A = get_timestamp_phase_A();timestamp_B = get_timestamp_phase_B();timestamp_C = get_timestamp_phase_C();// 计算相位差phase_difference_AB = calculate_phase_difference(timestamp_A, timestamp_B);phase_difference_BC = calculate_phase_difference(timestamp_B, timestamp_C);phase_difference_CA = calculate_phase_difference(timestamp_C, timestamp_A);// 判断相序if (phase_difference_AB < phase_difference_BC &&phase_difference_BC < phase_difference_CA) {// 相序为ABC} else if (phase_difference_AB > phase_difference_BC &&phase_difference_BC > phase_difference_CA) {// 相序为CBA} else {// 相序不确定或异常}请注意,实际的单片机程序需要根据具体的硬件和系统要求进行更详细的实现。
第9卷 第5期 信 息 与 电 子 工 程 Vo1.9,No.52011年10月 INFORMATION AND ELECTRONIC ENGINEERING Oct.,2011 文章编号:1672-2892(2011)05-0600-04一种基于ARM Cortex 微控制器的相位差检测方法刘世国,彭春荣(中国科学院电子学研究所 传感技术国家重点实验室北方基地,北京 100190)摘 要:针对周期信号之间的小相位差难以检测的问题,提出了一种基于ARM Cortex 高性能微控制器,采用相位差放大处理技术的相位差检测方法,先使用放大器和比较器对初始信号进行处理,产生3个方波信号,然后利用ARM Cortex 处理器I/O 口的中断功能来检测相位差。
根据本方法进行了系统的软件、硬件设计和实际信号测试,测试结果表明:信号在1 kHz 时不确定度能达到2%。
关键词:相位差;ARM Cortex 处理器;微控制器;中断中图分类号:TN919.5;TP273 文献标识码:APhase difference measurement based on ARM cortex MCULIU Shi -guo,PENG Chun -rong(State Key Lab of Transducer Technology,Institute of Electronics,Chinese Academy of Sciences,Beijing 100190,China)Abstract: This paper presents a phase difference measurement method of two sine signals based onAdvanced RSIC Machines(ARM) Cortex Micro Control Unit(MCU). This measurement method firstlymagnifies the phase difference,then it uses the interrupt function I/O port of ARM MCU to detect thephase difference. The hardware and software of the detecting system are designed and tested. Theprecision of measurement reaches 2% when the frequency of input signals is 1kHz during testing.Key words: phase difference;Advanced RSIC Machines;Micro Control Unit;interrupt相位差的测量常应用在通信、仪器仪表设计、工业生产等诸多领域[1],它像电压和电流一样是一种非常重要的信号量,但对它的测量相比电压、电流等物理量要复杂些,目前主要有两类检测方法:时域法和频域法。