6-2 超前-滞后校正
- 格式:ppt
- 大小:1.01 MB
- 文档页数:25
6-1证明RC 无源超前校正环节 最大超前相角为采用半对数坐标时最大超前相角所对应的频率位于两个转折频率的中间或等于零、极点乘积的平方根,即 6-2某单位反馈控制系统的设计指标为上升时间0.1r t ≤秒,超调量%16%σ≤,斜坡输入下的稳态误差0.05ssv e ≤。
(a )试问系统开环频率特性的低频段需要满足什么要求?中频段需要满足什么要求?(b )在s 平面内绘制出能满足设计要求的系统主导极点所在的区域。
6-3某系统框图如下图所示,误差c r e -=,01≥K ,02≥K 。
(a )要求系统对单位斜坡输入t t r =)(的稳态误差3.0≤,主导极点的阻尼比707.0≥ξ,调节时间 2.33s t ≤秒(按5%误差考虑),请在s 平面上绘制出满足上述设计要求的闭环极点的可行区域,给出1K 、2K 应满足的条件。
(b )设11=K 、2、10,绘制三种情况下以2K 为可变参数的根轨迹。
(c )设101=K ,确定满足(a )中性能指标的2K 的值。
6-4下图所示为钟摆的角度控制系统,其中被控对象为阻尼为零的二阶系统。
(a )试问控制器()c G s 必须满足什么条件,才能使系统为非条件稳定系统?(b )选用常规调节器,使得系统对阶跃扰动输入w 稳态误差为零,系统还可以做到非条件稳定吗?(c )选用PID 控制器应用根轨迹方法分析p k 、i T 和d k 发生变化时对系统快速性、稳定性的影响。
答案:应用关系12d i TT k T =和12p i TT k T +=容易给出分析结果。
6-5力、转矩的积分为速度、转速,速度、转速的积分为位置、转角,许多重要的运动控制系统的被控对象可以描述为二重积分器传递函数,即用根轨迹法分析比例控制p k 、比例微分控制(1)p d k k s k s +=+和超前校正(1)(12)k s s ++、(1)(9)k s s ++、(1)(4)k s s ++几种情况下闭环根轨迹的情况和闭环系统的性能。
看到别人设定的下载币5块钱一个,太黑了。
为了方便各位友友都有享受文档的权利,果断现在下来再共享第六章控制系统的校正及综合6-1什么是系统的校正?系统的校正有哪些方法?6-2试说明超前网络和之后网络的频率特性,它们各自有哪些特点?6-3试说明频率法超前校正和滞后校正的使用条件。
6-4相位滞后网络的相位角滞后的,为什么可以用来改善系统的相位裕度?6-5反馈校正所依据的基本原理是什么?6-6试说明系统局部反馈对系统产生哪些主要影响。
6-7在校正网络中,为何很少使用纯微分环节?6-8试说明复合校正中补偿的基本原理是什么?6-9选择填空。
在用频率法设计校正装置时,采用串联超前网络是利用它的(),采用串联滞后校正网络利用它的()。
A 相位超前特性B 相位滞后特性C 低频衰减特性D 高频衰减特性6-10 选择填空。
闭环控制系统因为有了负反馈,能有效抑制()中参数变化对系统性能的影响。
A 正向通道 B反向通道 C 前馈通道6-11 设一单位反馈系统其开环传递函数为W(s)=若使系统的稳态速度误差系数,相位裕度不小于,增益裕量不小于10dB,试确定系统的串联校正装置。
解:→所以其对数频率特性如下:其相频特性:相位裕度不满足要求设校正后系统为二阶最佳,则校正后相位裕度为,增益裕量为无穷大。
校正后系统对数频率特性如下:校正后系统传递函数为因为所以串联校正装置为超前校正。
6-12设一单位反馈系统,其开环传递函数为W(s)=试求系统的稳态加速度误差系数和相位裕度不小于35的串联校正装置。
解:所以其对数频率特性如下:其相频特性:相位裕度不满足要求,并且系统不稳定。
设校正后系统对数频率特性如上(红线所示):则校正后系统传递函数为因为在时(见红线部分),,则→选取,则校正后系统传递函数为其相频特性:相位裕度满足要求。
校正后的对数频率曲线如下:因为所以校正装置为滞后-超前校正。
6-13设一单位反馈系统,其开环传递函数为W(s)=要求校正后的开环频率特性曲线与M=4dB的等M圆相切,切点频率w=3,并且在高频段w>200具有锐截止-3特性,试确定校正装置。
习 题 66-1 设控制系统的开环传递函数为:()()()s s s s G 1.015.0110++= 绘出系统的Bode 图并求出相角裕量和幅值裕量。
若采用传递函数为(1+0.23s)/(1+0.023s)的串联校正装置,试求校正后系统的幅值和相角裕度,并讨论校正后系统的性能有何改进。
6—2设控制系统的开环频率特性为()()()()ωωωωωj j j j H j G 25.01625.011++= ①绘出系统的Bode 图,并确定系统的相角裕度和幅值裕度以及系统的稳定性; ②如引入传递函数()()()0125.025.005.0++=s s s G c 的相位滞后校正装置,试绘出校正后系统的Bode 图,并确定校正后系统的相角裕度和幅值裕度。
6 3设单位反馈系统的开环传递函数为()()()8210++=s s s s G 设计一校正装置,使静态速度误差系数K v =80,并使闭环主导极点位于s=-2±j23。
6-4设单位反馈系统的开环传递函数为()()()93++=s s s K s G ①如果要求系统在单位阶跃输入作用下的超凋量σ =20%,试确定K 值;②根据所确定的K 值,求出系统在单位阶跃输入下的调节时间t s 。
,以及静态速度误差系数; ③设计一串联校正装置,使系统K v ≥20,σ≤25%,t s 减少两倍以上。
6 5 已知单位反馈系统开环传递函数为()()()12.011.0++=s s s K s G 设计校正网络,使K v ≥30,γ≥40º,ωn ≥2.5,K g ≥8dB 。
6-6 由实验测得单位反馈二阶系统的单位阶跃响应如图6-38所示.要求①绘制系统的方框图,并标出参数值;②系统单位阶跃响应的超调量σ =20%,峰值时间t p =0.5s ,设计适当的校正环节并画出校正后系统的方框图。
6-7设原系统的开环传递函数为()()()15.012.010++=s s s s G 要求校正后系统的相角裕度γ=65º。

在自动控制系统中,为了改善系统的稳定性和瞬态性能,常采用一种称为超前滞后校正的方法。
这种控制策略涉及到对系统开环传递函数的修改,以改变系统的相位和幅值特性,使得闭环系统的性能满足设计要求。
具体来说,超前校正主要用于提高系统的响应速度和稳定性,而滞后校正则用以增强系统的稳态精度和抗干扰能力。
超前校正的原理是通过在控制系统中引入一个具有相位超前特性的校正器,该校正器在中频段产生正相位shift 并增加系统的截止频率。
这导致系统响应速度变快,过渡过程时间缩短,从而提高了系统动态性能。
由于相位的提前,系统的相位裕度增大,进而提升了系统的稳定性。
然而,超前校正通常会牺牲系统的低频增益,这可能会影响其稳态精度。
滞后校正则是通过加入一个具有相位滞后特性的校正器,它在低频段提供额外的增益而在高频段减少增益,从而增强了系统的低频响应。
这样做可以减小或消除静差,提高系统的稳态准确性。
滞后校正还会降低系统的截止频率,增加相角滞后,有助于滤除高频噪声,提升系统的抗干扰性。
不过,滞后校正会减小系统的相位裕度,可能导致系统反应缓慢,过渡过程时间变长。
在实际应用中,工程师会根据系统的实际需要选择合适的校正方式。
对于需要快速响应和良好动态性能的系统,可能会倾向于使用超前校正;而对于注重稳态精度和抗干扰能力的场合,则可能优先考虑滞后校正。
有时也会将超前和滞后校正结合起来形成超前-滞后校正,以期达到更优的综合性能。
总结而言,超前滞后校正是一种在控制系统设计中常用的方法,它通过改变系统的频率响应来满足不同的性能指标。
超前校正主要改善系统的动态性能和稳定性,而滞后校正则更注重于提升稳态精度和抗干扰能力。
掌握超前滞后校正的原理和适用场合,对于自动控制系统的设计至关重要。
超前滞后校正超前滞后校正设计的基本原理是利用网络的超前部分来增大系统的相角裕度,同时利用滞后部分来改善系统的稳态性能。
这种矫正方法兼有滞后校正和超前校正的优点,即已校正系统响应速度较快,超调亮较小,抑制高频噪声的性能也较好。
当待校正系统不稳定,且要求矫正后系统的响应速度、相角裕度和稳态精度较高时,采用超前滞后校正比较合适。
超前滞后矫正器的传递函数可表示为:sT s T s T s T G c 22111111)s (βα++•++=式中,1=*βα,1,1<>βα。
基于MATLAB 的超前滞后校正器的设计步骤:(1)根据要求的稳态性能指标,求系统的开环增益K 。
(2)更具求得的K 值,用MATLAB 软件绘制校正前原系统的BODE 图,并求原系统的幅值裕度(Gm )、相角裕度(Pm )、截至频率c ϖ,检验性能指标是否满足要求。
若不满足,执行(3)。
(3)在原系统对数幅频特性曲线上,选择斜率由-20dB/dec 变为-40dB/dec 的交接频率作为校正网络超前部分的交接频率1/T2。
(4)根据设计要求确定校正后系统截至频率c ϖ,使得校正网络中1/T2和1/()2*T β位于c ϖ的两侧,在c ϖ处Gc(s)可近似为ααs T s T s T s T s G 2121c )(=⋅≈ 校正后系统在c ϖ处的对数幅频应为0dB ,所以有0)lg(20)(20=+αϖϖc c T L由此解出α。
(5)根据相角裕度的要求,估算校正网络滞后部分的交接频率1/T1,估算中因1/αT1离c ϖ最远,所以可令1/(1T *α)这一项在c ϖ处的相角为-90度,再通过)()(c 180ϖϕϖϕγ c c c ++︒=,求解T1。
(6)用matlab 绘bode 图,并检验系统各项指标是否满足设计要求,若不满足则可适当增大c ϖ,重新执行步骤(4)、(5)、(6),直至满足。
仿真实例 设一单位反馈系统的开环传递函数为)15.0)(11.0()(0++=s s s K s G 要求系统校正后满足下列指标要求:•静态速度误差系数Kv=180*1/s•截止频率s /rad 2.3c ≥ϖ•相角裕度45≥γ•幅值裕度dB 10h ≥设计过程:(1)求解K 。
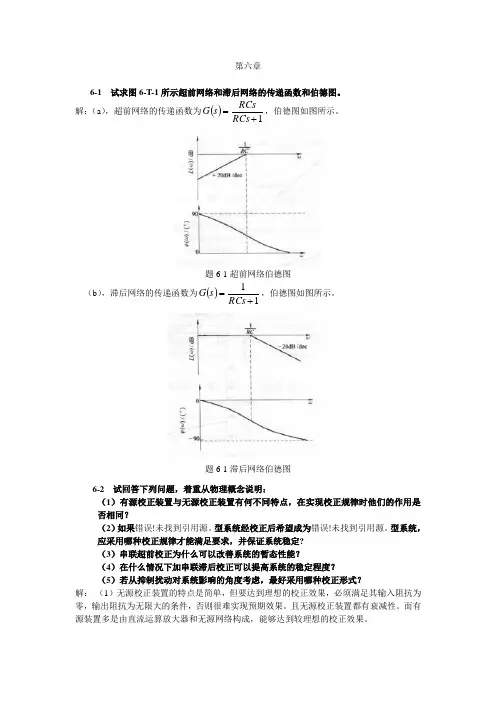
第六章6-1 试求图6-T-1所示超前网络和滞后网络的传递函数和伯德图。
解:(a ),超前网络的传递函数为()1+=RCs RCss G ,伯德图如图所示。
题6-1超前网络伯德图(b ),滞后网络的传递函数为()11+=RCs s G ,伯德图如图所示。
题6-1滞后网络伯德图6-2 试回答下列问题,着重从物理概念说明:(1)有源校正装置与无源校正装置有何不同特点,在实现校正规律时他们的作用是否相同?(2)如果错误!未找到引用源。
型系统经校正后希望成为错误!未找到引用源。
型系统,应采用哪种校正规律才能满足要求,并保证系统稳定? (3)串联超前校正为什么可以改善系统的暂态性能?(4)在什么情况下加串联滞后校正可以提高系统的稳定程度?(5)若从抑制扰动对系统影响的角度考虑,最好采用哪种校正形式?解: (1)无源校正装置的特点是简单,但要达到理想的校正效果,必须满足其输入阻抗为零,输出阻抗为无限大的条件,否则很难实现预期效果。
且无源校正装置都有衰减性。
而有源装置多是由直流运算放大器和无源网络构成,能够达到较理想的校正效果。
(2)采用比例-积分校正可使系统由I 型转变为II 型(3)利用串联超前校正装置在剪切频率附近提供的相位超前角,可增大系统的相角裕度 ,从而改善系统的暂态性能。
(4)当ω减小,相频特性)(ωϕ朝0方向变化且斜率较大时,加串联滞后校正可以提高系统的稳定程度。
(5)可根据扰动的性质,采用带有积分作用的串联校正,或采用复合校正。
6-3 某单位反馈系统的开环传递函数为6418)(2++=s s s G (1)计算校正前系统的剪切频率和相角裕度。
(2)串联传递函数为1125.014.0)(++=s s s G c 的超前校正装置,求校正后系统的剪切频率和相角裕度。
(3)串联传递函数为1100110)(++=s s s G c 的滞后校正装置,求校正后系统的剪切频率和相角裕度。
(4)讨论串联超前校正、串联滞后校正的不同作用。
超前滞后校正原理你看啊,在控制系统里就像在管理一个小世界一样。
有时候这个系统它表现得不太好,就像一个调皮的小孩,老是达不到我们想要的效果。
这时候呢,超前校正和滞后校正就像是两位神奇的小助手跑出来帮忙啦。
先说说超前校正吧。
超前校正就像是一个充满活力的小机灵鬼。
想象一下,系统就像一辆汽车在行驶,但是它的转向有点慢,不能很快地按照我们想要的方向改变。
超前校正就像是给这辆汽车装了一个超级灵敏的转向助力器。
它的原理呢,就是在系统的某个地方加进去一些东西,让系统能够提前做出反应。
比如说,在信号还没完全变大或者变小之前,就提前调整系统的状态。
这就好比你知道前面的路要拐弯了,你提前就开始转动方向盘,而不是等到到了拐弯的地方才开始转。
超前校正它主要是改变了系统的相角裕度,让系统变得更加稳定而且快速响应。
就像那个提前做好准备的人,不管遇到什么情况都能快速应对,不会手忙脚乱的。
再来说说滞后校正。
滞后校正就像是一个沉稳的老大哥。
它的作用方式有点不一样哦。
如果说超前校正像是快刀斩乱麻,那滞后校正就是慢条斯理地调整。
比如说系统里有些高频的噪声或者干扰,就像一群小苍蝇在捣乱。
滞后校正就像是一个大扇子,慢慢地把这些苍蝇给赶走。
它主要是通过降低系统的高频增益来达到这个目的的。
就像是在一个热闹的派对上,那些吵闹的高音部分被慢慢地降低了音量,让整个系统变得更加平稳。
滞后校正不会像超前校正那样让系统快速反应,但是它能让系统在长期的运行中更加稳定可靠。
它就像是给系统打了一针镇定剂,让那些过度兴奋或者不稳定的因素慢慢平静下来。
这超前校正和滞后校正啊,它们的存在都是为了让系统变得更好。
有时候我们的系统可能既需要快速反应的能力,又需要长期稳定的状态。
这时候呢,我们可能就要把超前校正和滞后校正结合起来用啦。
就像一个超级英雄组合,一个负责冲锋陷阵,快速应对危机,一个负责稳住后方,保证长期的稳定和平静。
你可别小看这两个校正原理哦。
在很多实际的工程应用里,它们可是发挥着巨大的作用呢。
目录摘要 (1)引言 (2)1 滞后-超前校正设计目的和原理 (2)1.1滞后-超前校正设计目的 (2)1.2滞后-超前校正设计原理 (2)2 滞后-超前校正的设计过程 (4)2.1校正前系统的参数 (4)2.1.1 用MATLAB绘制校正前系统的伯德图 (4)2.1.2 用MATLAB求校正前系统的幅值裕量和相位裕量 (5)2.1.3 用MATLAB绘制校正前系统的根轨迹 (6)2.1.4 对校正前系统进行仿真分析 (7)2.2滞后-超前校正设计参数计算 (8)ω (8)2.2.1 选择校正后的截止频率c2.2.2确定校正参数β、2T和1T (8)2.3滞后-超前校正后的验证 (9)2.3.1 用MATLAB求校正后系统的幅值裕量和相位裕量 (9)2.3.2 用MATLAB绘制校正后系统的伯德图 (10)2.3.3 用MATLAB绘制校正后系统的根轨迹 (11)2.3.4 用MATLAB对校正前后的系统进行仿真分析 (12)结束语 (14)参考文献 (15)用MATLAB进行控制系统的滞后-超前校正设计摘要自动控制技术的应用日益广泛,除了在国防、空间科技等尖端领域里成为不可或缺的重要技术之外,在机电工程、冶金、化工、轻工、交通管理、环境保护、农业等领域中,自动控制技术的作用也日显突出。
自动控制技术的运用大大提高了劳动生产率和产品质量,同时,也改善了劳动条件,在改善人类的居住环境和提高生活质量方面也发挥了非常重要的作用。
今天的社会生活中,自动化装置已经无所不在,为人类文明进步做出了重要的贡献。
自动控制系统的课程设计是检验我们学过知识扎实程度的好机会,也让我们的知识体系更加系统,更加完善。
在不断学习新知识的基础上得到了动手能力的训练,启发创新思维及独立解决实际问题的能力,提高设计、装配、调试能力。
关键词:滞后超前校正伯德图 MATLAB 校正参数引言如果系统设计要求满足的性能指标属频域特征量,则通过采用频域校正方法。