有限元法及应用知识点超全总结
- 格式:ppt
- 大小:5.72 MB
- 文档页数:84
有限元知识点归纳1.、有限元解的特点、原因?答:有限元解一般偏小,即位移解下限性原因:单元原是连续体的一部分,具有无限多个自由度。
在假定了单元的位移函数后,自由度限制为只有以节点位移表示的有限自由度,即位移函数对单元的变形进行了约束和限制,使单元的刚度较实际连续体加强了,因此,连续体的整体刚度随之增加,离散后的刚度较实际的刚度K为大,因此求得的位移近似解总体上将小于精确解。
2、形函数收敛准则(写出某种单元的形函数,并讨论收敛性)P49(1)在节点i处N i=1,其它节点N i=0;(2)在单元之间,必须使由其定义的未知量连续;(3)应包含完全一次多项式;(4)应满足∑Ni=1以上条件是使单元满足收敛条件所必须得。
可以推证,由满足以上条件的形函数所建单元是完备协调的单元,所以一定是收敛的。
4、等参元的概念、特点、用时注意什么?(王勖成P131)答:等参元—为了将局部坐标中几何形状规则的单元转换成总体(笛卡尔)坐标中的几何形状扭曲的单元,以满足对一般形状求解域进行离散化的需要,必须建立一个坐标变换。
即:为建立上述的变换,最方便的方法是将上式表示成插值函数的形式,即:其中m是用以进行坐标变换的单元节点数,xi,yi,zi是这些结点在总体(笛卡尔)坐标内的坐标值,Ni’称为形状函数,实际上它也是局部坐标表示的插值函数。
称前者为母单元,后者为子单元。
还可以看到坐标变换关系式和函数插值表示式:在形式上是相同的。
如果坐标变换和函数插值采用相同的结点,并且采用相同的插值函数,即m=n,Ni’=Ni,则称这种变换为等参变换。
5、单元离散?P42答:离散化既是将连续体用假想的线或面分割成有限个部分,各部分之间用有限个点相连。
每个部分称为一个单元,连接点称为结点。
对于平面问题,最简单、最常用的离散方式是将其分解成有限个三角形单元,单元之间在三角形顶点上相连。
这种单元称为常应变三角形单元。
常用的单元离散有三节点三角形单元、六节点三角形单元、四节点四边形单元、八节点四边形单元以及等参元。
有限元分析及其应用-2010;思考题:1、有限元法的基本思想是什么?有限元法的基本步骤有那些?其中“离散”的含义是什么?是如何将无限自由度问题转化为有限自由度问题的?答:基本思想:几何离散和分片插值。
基本步骤:结构离散、单元分析和整体分析。
离散的含义:用假想的线或面将连续物体分割成由有限个单元组成的集合,且单元之间仅在节点处连接,单元之间的作用仅由节点传递。
当单元趋近无限小,节点无限多,则这种离散结构将趋近于实际的连续结构。
2、有限元法与经典的差分法、里兹法有何区别?区别:差分法:均匀离散求解域,差分代替微分,要求规则边界,几何形状复杂精度较低;里兹法:根据描述问题的微分方程和相应的定解构造等价的泛函表达式,求得近似解;有限元:基于变分法,采用分片近似进而逼近总体的求解微分方程的数值计算方法。
3、一根单位长度重量为q的悬挂直杆,上端固定,下端受垂直向下的外力P,试1)建立其受拉伸的微分方程及边界条件;2)构造其泛函形式;3)基于有限元基本思想和泛函求极值构造其有限元的计算格式(即最小势能原理)。
4、以简单实例为对象,分别按虚功原理和变分原理导出有限元法的基本格式(单元刚度矩阵)。
5、什么是节点力和节点载荷?两者有何区别?答:节点力:单元与单元之间通过节点相互作用节点载荷:作用于节点上的外载6、单元刚度矩阵和整体刚度矩阵各有何特点?其中每个矩阵元素的物理意义是什么(按自由度和节点解释)?答:单元刚度矩阵:对称性、奇异性、主对角线恒为正整体刚度矩阵:对称性、奇异性、主对角线恒为正、稀疏性、带状性。
Kij,表示j节点产生单位位移、其他节点位移为零时作用i节点的力,节点力等于节点位移与单元刚度元素乘积之和。
7、单元的形函数具有什么特点?有哪些性质?答:形函数的特点:Ni为x,y的坐标函数,与位移函数有相同的阶次。
形函数Ni在i节点的值为1,而在其他节点上的值为0;单元内任一点的形函数之和恒等于1;形函数的值在0~1间变化。

1、有限元是近似求解一般连续场问题的数值方法2、有限元法将连续的求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接3、直梁在外力的作用下,横截面的内力有剪力和弯矩两个.4、平面刚架结构在外力的作用下,横截面上的内力有轴力、剪力、弯矩 .5、进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角6、平面刚架有限元分析,节点位移有轴向位移、横向位移、转角。
7、在弹性和小变形下,节点力和节点位移关系是线性关系。
8、弹性力学问题的方程个数有15个,未知量个数有15个。
9、弹性力学平面问题方程个数有8,未知数8个。
10、几何方程是研究应变和位移之间关系的方程11、物理方程是描述应力和应变关系的方程12、平衡方程反映了应力和体力之间关系的13、把经过物体内任意一点各个截面上的应力状况叫做一点的应力状态14、9形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_15、形函数是_三角形_单元内部坐标的_线性_函数,他反映了单元的_位移_状态16、在进行节点编号时,同一单元的相邻节点的号码差尽量小.17、三角形单元的位移模式为_线性位移模式_-18、矩形单元的位移模式为__双线性位移模式_19、在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性20、单元刚度矩阵描述了_节点力_和_节点位移之间的关系21、矩形单元边界上位移是连续变化的1. 诉述有限元法的定义答:有限元法是近似求解一般连续场问题的数值方法2. 有限元法的基本思想是什么答:首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。
3. 有限元法的分类和基本步骤有哪些答:分类:位移法、力法、混合法;步骤:结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。
有限元知识点汇总第一章1、何为有限元法?其基本思想是什么?》有限元法是一种基于变分法而发展起来的求解微分方程的数值计算方法。
》基本思想:化整为零,化零为整2、为什么说有限元法是近似的方法,体现在哪里?》有限元法的基本思想是几何离散和分片插值;》用离散单元的组合来逼近原始结构,体现了几何上的近似;用近似函数逼近未知量在单元内的真实解,体现了数学上的近似;利用及问题的等效的变分原理建立有限元基本方程,又体现了明确的物理背景。
3、单元、节点的概念?》单元:把参数单元划分成网格,这些网格就称为单元。
》节点:网格间相互连接的点称为节点。
4、有限元法分析过程可归纳为几个步骤?》3大步骤;——结构离散化;——单元分析;——整体分析。
5、有限元方法分几种?本课程讲授的是哪一种?》有限元方法分3种;——位移法、力法、混合法。
》本课程讲授的:位移法6、弹性力学的基本变量是什么?何为几何方程、物理方程及虚功方程?弹性矩阵的特点?》弹性力学的基本变量是——{外力、应力、应变、位移}》几何方程——{描述弹性体应变分量及位移分量之间关系的方程}》物理方程——{描述应力分量及应变分量之间的关系}》虚功方程——{描述内力和外力的关系的方程}》弹性矩阵特点——{ }7、何为平面应力问题和平面应变问题?》平面应力问题——{满足(1)几何条件——所研究的是一根很薄的等厚度薄板,即一个方向上的几何尺寸远远小于其余两个面上的几何尺寸;(2)载荷条件——作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面上无外力作用}》平面应变问题——{满足(1)几何条件——所研究的是长柱体,即长度方向的尺寸远远大于横截面的尺寸,且横截面沿长度方向不变;(2)载荷条件——作用于长柱体结构上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力}第二章1 何为结构的离散化?离散化的目的?何为有限元模型?答:⑴所谓离散化,是用假想的线或面将连续物体分割成由有限个单元组成的集合体。
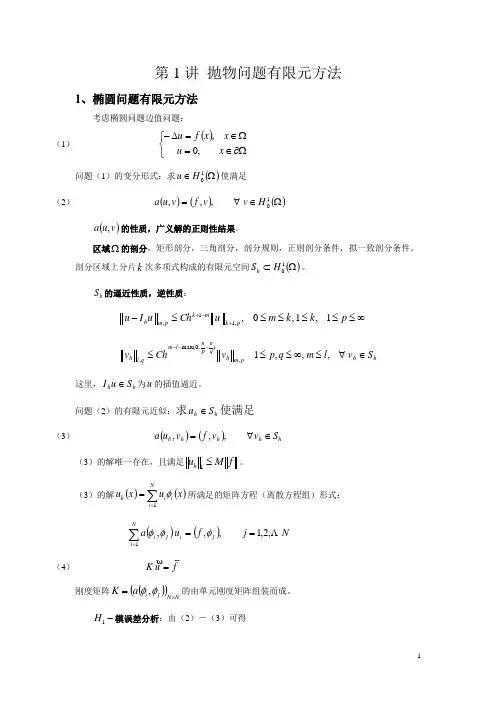
第1讲 抛物问题有限元方法1、椭圆问题有限元方法考虑椭圆问题边值问题:(1) ()⎩⎨⎧Ω∂∈=Ω∈=∆-x u x x f u ,0,问题(1)的变分形式:求()Ω∈10H u 使满足(2) ()()()Ω∈∀=1,,,H v v f v u a ()v u a ,的性质,广义解的正则性结果。
区域Ω的剖分,矩形剖分,三角剖分,剖分规则,正则剖分条件,拟一致剖分条件。
剖分区域上分片k 次多项式构成的有限元空间()Ω⊂10H S h 。
h S 的逼近性质,逆性质:∞≤≤≤≤≤≤-+-+p k k m uCh uI u pk m k pm h 1,1,0,,11,h h pm hqnp n l m ql hS v l m q p v Chv ∈∀≤∞≤≤≤---,,,1,),0(max ,这里,h h S u I ∈为u 的插值逼近。
问题(2)的有限元近似:求h h S u ∈使满足 (3) ()()h h h h h S v v f v u a ∈∀=,,,(3)的解唯一存在,且满足f M u h ≤1。
(3)的解()()∑==Ni i i h x u x u 1φ所满足的矩阵方程(离散方程组)形式:()()N j f u a jNi iji,2,1,,,1==∑=φφφ(4) f u K=刚度矩阵()()NN ji a K ⨯=φφ,的由单元刚度矩阵组装而成。
-1H 模误差分析:由(2)-(3)可得(5) h h h h S v v u u a ∈∀=-,0),(由(5)可首先得到()()1121,,u I u u u M u I u u u a u u u u a u u r h hh h h h h--≤--=--≤-则得到(6) 1,111≥≤-≤-+k uCh uI u C u u k k h h2L -模误差分析设210H H w ∈ 满足h h u u C w win u u w -≤=Ω-=∆-Ω∂2,0,,用h u u -与此方程做内积,由(5)式和插值逼近性质得到()()w u u A u u w A u u h h h,,2-=-=-()hhhh h h h u u u u Ch w u u Ch w I w u u C w I w u u A --≤-≤--≤--=12111,再利用-1H 模误差估计结果,得到 (7) 1,111≥≤-≤-++k uCh u u Ch u u k k hh最优阶误差估计和超收敛估计概念。
填空与选择题 1并行计算是一种提高效率的计算。
2.材料的主要特性:弹性模量、泊松比、硬化指数、屈服强度。
3.有限元方法有3类分为位移法(以结点位移为未知量),力法,混合法。
3.数值模拟技术:以电子计算机为手段,通过数值计算和图像显示的方法解决工程问题。
5.垂直对称面上的结点位移为零。
6单元划分常见单元类型:六面体单元和四面体单元,Deform 常用四面体单元。
7.四面体单元:每个结点上有两个位移,整个单元有六个结点位移,i u i v 表示结点y x i ,处方向的位移,单元结点位移列阵:{}[]T m m j j i i e v u v u v u q =。
单元应变公式:{}[]{}e q B =ε;单元应力公式:{}[]{}εσD =;[]B 指应变与结点位移的关系矩阵;[]D 指应力应变关系矩阵8.常用商业有限元软件:LS —DYSA 、eta/DYNAFORM 、ABAQUS 、ANSYS9.Deform3D能导入的几何模型数据格式:STL、UNV、GEO、IGS、NAS、PDA。
10.Deform3D 的单位包括:公制SI 和英制EI11.后处理常用的显示方式:云图显示、结点追踪和切片。
12.摩擦模型分为:库伦摩擦、剪切摩擦、混合摩擦213.增量步长的定义可以用位移增量和时间增量两种方式定义。
14. 实际塑性成形问题涉及的三大力学非线性问题:几何非线性、材料非线性和边界非线性15.每个增量步的计算需要迭代两次。
16.自适应单元技术包括自适应重划分和自适应加密。
原因:有限元模拟数值解的精度依赖于单元结构。
17.四边形单元常见的畸形:自交叉、内凹、长宽比太大18.单元自适应加密的规则:单元的每条边不能多于两个单元与之相邻(注:适用于三角形和四边形单元) 19.库伦摩擦模型的摩擦系数取值区间(0,0.5);剪切模型的摩擦因子取值区间(0,1)20.大部分塑性成形工艺具有非稳态变形的特点。
..'有限元法第一章绪论1.有限元法的定义:有限元法是近似求解一般连续场问题的数值方法。
2.有限元法的特点:A物理概念清晰。
B复杂的结构适应性。
C各种物理问题的适用性。
D适合计算机实现的高效性。
3.有限元法的基本思想:首先,将表示结构的连续体离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示全求解域内待求的未知场变量。
每个单元内的近似函数用未知场变量函数在单元各个节点上的数值和与其对应的插值函数表示。
最后,通过和原问题数学模型等效的变分原理或加权余量法,建立求解基本未知量的代数方程组或常微分方程组,应用数值方法求解,从而得到问题的解答。
4.有限元法的基本步骤:从选择未知量的角度有限元法分为三类:位移法、力法和混合法。
位移法求解步骤:A结构的离散化。
B单元分析。
C单元集成。
D引入约束条件,求解线性方程组,得出节点位移。
E由节点位移计算单元的应力与应变。
5.有限元法的优缺点:优点:a有限元法可以模拟各种几何形状复杂的结构,得出其近似解。
B有限元法的解题步骤可以系统化、标准化,能够开发出灵活通用的计算机程序,使其能够广泛地应用于各种场合。
c 边界条件是在建立结构总体刚度方程后再引入的,边界条件和结构模型具有相对独立性,可以从其他CAD 软件中导入创建好的模型。
有限元法不需要适用于整个结构的插值函数,而是每个单元本身有各自的插值函数。
这就使得数学处理比较方便,对复杂形状的结构也能适用。
e有限元法很容易处理非均匀连续介质,可以求解非线性问题和进行耦合场分析。
F有限元法可以与优化设计方法相结合,以便发挥各自的优点。
缺点:a有限单元对于复杂问题的分析计算所耗费的计算资源是相当惊人的。
b对无限求解域问题没有较好的处理方法。
c有限元软件在具体应用时需依赖使用者的经验,而且在精度分析时需耗费相当大的计算资源。
6.屈曲:载荷的大小超过一定的数值,变形的形状与此之前变形的形状发生了不同的变化,从而承担载荷的能力减少了,把这一现象称为屈曲。