2016年VEX机器人工程挑战赛基本型范例机器人搭建步骤
- 格式:pdf
- 大小:835.96 KB
- 文档页数:14

教育论坛Digital Space P .311VEX 世界冠军(高中组)——赢在搭建孙思皓 北京工大附中高二.一班摘要:近几年,机器人发展迅猛,人人皆知智能机器人目前已应用于医疗、工业和家庭等, 2016年机器人阿尔法狗以1:4占胜围棋冠军,机器人已智超人类。
另外,智能机器人技术的创新应用也有利于推动国家智能产业的兴起,将促进国家劳动力密集型向自动化工业转型,提高工业生产效率,再有,机器人产业能够有效弥补国家逐步淘汰的高能耗、高污染产业带来的冲击。
所以,机器人的发展势在必行,于是各大科技机构和教育机构开始组织学习机器人。
给我们学生学习和锻炼提供很好的机会。
2017年高中组VEX 世界冠军总结关键词:机器人 世界冠军 机器人搭建 VEX 比赛学校开展机器人社团,深知学习机器人重要性的我积极参加了,于是也就开始了VEX 机器人学习生活,女孩子学智能机器人可谓是“欲渡黄河冰塞川,将登太行雪满山”苦不堪言,要想学懂且再搭建个参赛的机器人就更是“蜀道之难,难于上青天”。
一年半的期间利用了所有能利用的时间进行学习,走着、坐着、躺着、睡着满脑子都是机器人。
编程设计时就得把自己当成一名计算机行家,深挖脑洞的展开抽象思维;动手搭建时完全就是车间工人,动作要沉稳和精准;调试时完全就是一名维修工程师,练出慧眼识珠的本领来找错、纠错;操盘时就像个赛车手,沉着稳定达到知己知彼百战不殆。
足不出户极大的锻炼了我的想象能力、动手能力、心理素质及全身心投入的专注力,称得上是课本之外的别有一翻风味的学习历练之旅。
学校的这一社团学习过程拓展了我们学生对科学、技术、工程和数学领域的兴趣,激发了我们的科技潜能,提高并促进我们的团队合作精神、领导才能和解决问题能力,也成就了我们的科技创新梦想!诚然,刚入门时,老师会给讲一些基础和理论,也要学习几周机器人的理论知识和学习它的重要意义,最重要的是我的老师是教历史的机器人老师,真的是从历史长河的角度挖掘出每位学生的兴趣和积极性,边理论边实践,还时常用描述赛场的激烈场面和驾驭机器人打败对手的无人超跃感,把我们每位学生的积极拉到了顶峰,于是在王老师的代领下,按大赛的要求设计编程,然后精心搭建,再反复调试,达到大赛的标准能够自动程序控制,又能通过遥控制在特定区场地进行特定的赛程,最后披星戴月的训练达到熟能生巧的地步去参赛。
2016年第十四届福建省青少年机器人竞赛VEX机器人工程挑战赛主题与规则1 VEX机器人工程挑战赛简介VEX机器人工程挑战赛是一项引进的青少年国际机器人比赛项目。
其活动对象为中小学生,要求参加比赛的代表队自行设计、制作机器人并进行编程。
参赛的机器人既能自动程序控制,又能通过遥控器控制,并可以在特定的竞赛场地上,按照规则的要求进行比赛活动。
在中国青少年机器人竞赛中设置VEX机器人工程挑战赛的目的是激发我国青少年对机器人技术的兴趣,为国际VEX机器人工程挑战赛选拔参赛队。
2 竞赛主题本届VEX挑战赛的主题为“一网打尽”。
“一网打尽”是一个令人兴奋和充满活力的比赛。
每场比赛包含两种不同类型控制方式——手控和自动控制。
比赛的特点是两个参赛组成的联队的机器人从赛场的两边出发进行比赛。
参赛队通过完成各种任务(把球射入篮筐得分,和/或把自己的联队伙伴举起到不同的高度得分,等等)竞争得分。
参加“一网打尽”比赛,参赛队要开发许多新技能来应对各种面临的挑战和障碍。
有些问题需要个人来解决,还有些问题要通过与队友及指导教师的交流来处理。
参赛队员要一起构建自己的机器人参加多次比赛,与自己的队友、家人和朋友分享取得的成绩。
经过比赛,学生们不仅可以完成自己的比赛机器人,也提升了对科技和利用科技来积极影响周围世界的认识。
此外,他们还可提高素质,如研究、规划、集思广益、合作、团队精神、领导能力等。
在每场比赛中,各由两支参赛队组成的两个联队(红队和蓝队)上场竞技,获取比对方联队更高的得分。
每场比赛的时间是120秒。
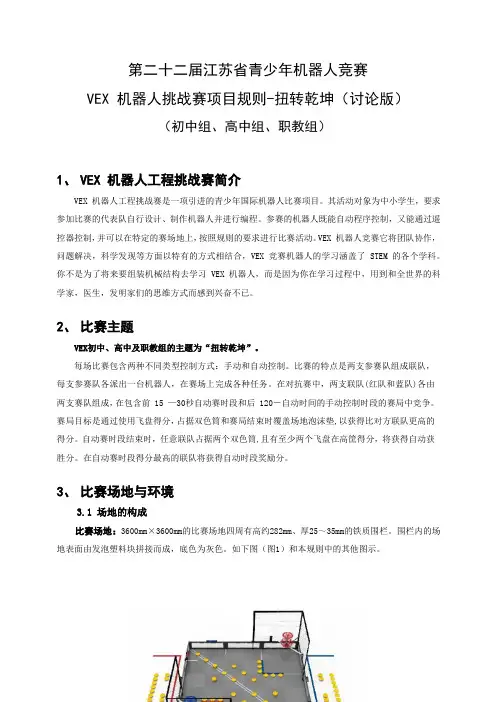
3 比赛场地与环境3.1 场地的构成图1是比赛场地的等角投影图。
图2为俯视图。
3600mm×3600mm的比赛场地四周有高约282mm、厚25~35mm的木质围栏。
围栏内的场地表面由泡沫塑料块拼接而成,底色为灰色。
有四块600mm×600mm 的方形区域,红色和蓝色各两块,是两个联队的机器人启动区。
红、蓝联队的站位在场地一侧。
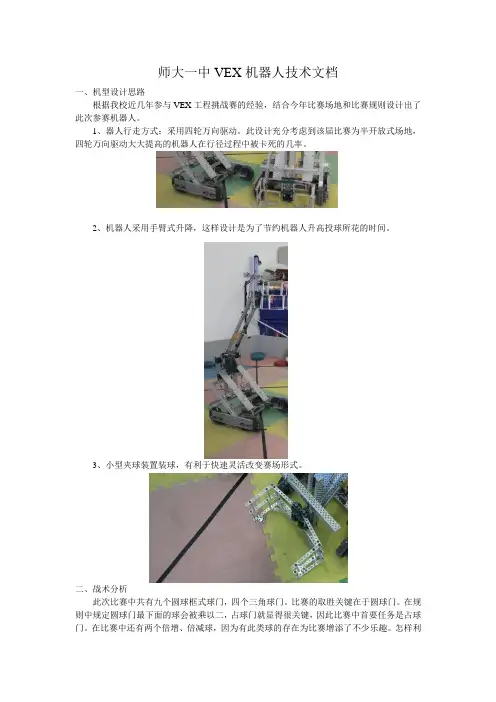
师大一中VEX机器人技术文档
一、机型设计思路
根据我校近几年参与VEX工程挑战赛的经验,结合今年比赛场地和比赛规则设计出了此次参赛机器人。
1、器人行走方式:采用四轮万向驱动。
此设计充分考虑到该届比赛为半开放式场地,四轮万向驱动大大提高的机器人在行径过程中被卡死的几率。
2、机器人采用手臂式升降,这样设计是为了节约机器人升高投球所花的时间。
3、小型夹球装置装球,有利于快速灵活改变赛场形式。
二、战术分析
此次比赛中共有九个圆球框式球门,四个三角球门。
比赛的取胜关键在于圆球门。
在规则中规定圆球门最下面的球会被乘以二,占球门就显得很关键,因此比赛中首要任务是占球门。
在比赛中还有两个倍增、倍减球,因为有此类球的存在为比赛增添了不少乐趣。
怎样利
用这类球就显得尤其重要。
为了比赛最后阶段的倍增、倍减球的合理处理,我们最好在比赛避占满高球门。
当某高球门明显处于劣势时注意别浪费球,这类球门在中间区域时离倍减球最近,抓好时机投倍减球为最佳方案。
基于以上所述,搭建我校新一代VEX机器人是非常合理的。
三、整体结构
四、程序:
1、手动主程序
2、自动略图
2、子程序略图:。
vex iq slapshot竞赛手册
赛局说明
机器人技能挑战赛和团队协作挑战赛均使用相同的场地。
在团队协作挑战赛中,两台机器人组成联队,分别由其操作手控制,在每场赛局中,合作完成任务。
在机器人技能挑战赛中,一台机器人获得尽可能高的得分。
这些比赛包括由操作手全程操控的手控技能挑战赛口人为控制最少的自动技
能挑战赛。
赛局的目标是通过如下方式,获得尽可能高的得分:在堆叠区堆放轮囊,从悬挂杆上移除轮藏及在比赛结束时悬挂机器人。
赛局定义
联队--预先指定的两支寨队组成的团队,在一局团队挑战赛中协同作业。
联队得分--在团队挑战赛中,两支寨队合计获得的分数。
自动--机器人仅仅由来自传感器的信息和学生预先编程并输入主
控器的指令控制。
没有来自VEXIQ遥控器的指令输入。
边界条-用于构建雄区的蓝色/白色VEXIQ结构件。
奖分轮毂-赛局开始时放置在奖分柱上的两个(2)黄色轮之一。
奖分柱-位于属挂结构上方的由VEXIQ结构件构成的两个(2)悬挂杆之一,赛局开始时放置奖分轮囊。
机器人移除奖分轮囊得分。
堆叠区-由她面及边界条围成的位于场角落的两个(2)三维(3D)立体空间之一。
边界条是堆叠区的一部分。
罚停--对违反规则的赛队给予的处罚。
在停期间,被罚赛队不得操作其机器人,操作手必须将遥控器放在地上。

VEX 機器人競賽線上遠端競賽(LRT) 賽隊安裝與操作指南一、LRT設備清單與規格每支賽隊除準備一套完整的 VRC 競賽場地(根據<LRT5>規定,須依照競賽手冊與附錄A內容擺設)與競賽套件與機器人以外,還需要準備如下圖所示的連線設備。
賽隊參與線上遠端競賽所需的設備簡圖①筆電或電腦•Chrome 瀏覽器為最新版本,且已啟用“Experimental Web Platform Features”功能。
•操作 LRT 系統時,不得同時在筆電上使用其他視訊聊天應用程式或服務(如:Skype、Discord、Google Meets)。
•穩定的網路環境,強烈建議賽隊使用「有線網路」,並準備網路備案(如手機吃到飽熱點)。
②用於連接電腦與 V5 遙控器的 MicroUSB 線,請準備足夠長度的延長線③用於連接電腦與攝影機的 USB 延長線④腳架與支撐架⑤外接USB 網路攝影機(不得使用電腦內建的視訊鏡頭)•解析度 720p 以上。
•必須固定在場地的「觀眾席」側。
•賽局期間,操作手、機器人、遙控器,與完整且沒有被阻擋到的場地必須始終保持在攝影機的畫面中。
建議攝影機擺放在離場地 4 英尺、高於地面 5 英尺的地方,但實際擺放位置須視攝影機與 VRC 競賽手冊的〈LRT1〉、〈RSE7〉規則的擺設。
⑥用於連接電腦與攝影機的 USB 延長線⑦外接螢幕二、賽隊輔導員要求每支賽隊須指派一位成人作為「賽隊輔導員」,協助賽隊操作 LRT 系統。
賽隊輔導員條件:1. 年滿 18 歲及以上的成人,且不得為在學的高中生。
賽隊可以是教練、賽隊聯繫人或是成人監督者。
2. 熟悉本賽季 VRC/VIQC 驗機與競賽規則,瞭解競賽手冊、驗機表、LRT賽隊手冊等內容,並協助賽隊準備參與驗機與比賽。
3. 在賽前提供姓名(全名)與全日的聯繫電話號碼給主辦單位。
4. 比賽期間,賽隊輔導員必須親臨賽隊進行線上遠端競賽的地點,不得在其他房間或附近的場所。
VEX机器人工程挑战赛教程
认识VEX机器人及底盘搭建
一认识VEX机器人
VEX是一款机器人制作组件,目前在国内外的机器人比赛中,很多都是采用的VEX器材,比如国际性的FVC挑战赛,以及中国青少年机器人比赛中的VEX工程挑战赛。
VEX机器人的特点
▪一、采用钢质材料,搭建机器人结构牢固,当然,对同学们操作也提出了更高的要求;
▪二、机器人采用了触碰、光线、超声波等传感器作为输入装置,使机器人可以模仿人的各种感官,与环境发生互动;
▪三、采用马达、伺服器作为输出方式,形式多变,可以完成多种任务;
▪四、VEX机器人有自动和手动两种运行方式:自动,即由内部程序控制行动;
手动,遥控器控制行动。
VEX机器人能够做些什么
VEX机器人可以根据制作者的意愿,完成一定的功能,可自动完成,也可通过遥控由操作者操作完成。
VEX机器人基本结构
▪VEX机器人一般由以下几个部分组成
▪ 1 底盘
▪ 2 功能结构
▪ 3 主控器
▪ 4 传感器
VEX机器人器材部件
▪结构部件:
▪方形架车
▪
▪平面钢板平面钢条
▪▪▪
▪▪▪▪
搭建机器人一般过程▪底盘搭建
▪功能设计搭建
▪传动设计搭建
▪程序编写
▪测试应用
光敏传感器触碰开关编码器寻线传感器限位开关超声波传感器
▪1底盘拼装所用的材料:
▪
▪2车轮拼装所用的材料:
▪拼装后示意图:。
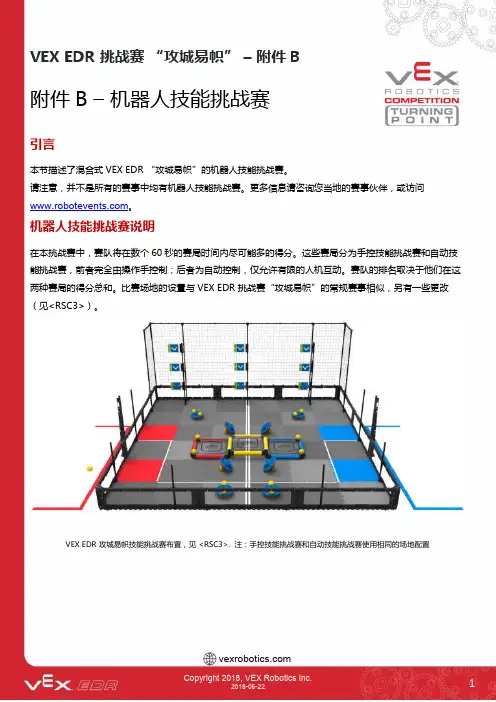
附件B – 机器人技能挑战赛引言本节描述了混合式VEX EDR “攻城易帜”的机器人技能挑战赛。
请注意,并不是所有的赛事中均有机器人技能挑战赛。
更多信息请咨询您当地的赛事伙伴,或访问。
机器人技能挑战赛说明在本挑战赛中,赛队将在数个60秒的赛局时间内尽可能多的得分。
这些赛局分为手控技能挑战赛和自动技能挑战赛,前者完全由操作手控制;后者为自动控制,仅允许有限的人机互动。
赛队的排名取决于他们在这两种赛局的得分总和。
比赛场地的设置与VEX EDR 挑战赛“攻城易帜”的常规赛事相似,另有一些更改(见<RSC3>)。
VEX EDR 攻城易帜技能挑战赛布置,见 <RSC3>. 注:手控技能挑战赛和自动技能挑战赛使用相同的场地配置机器人技能挑战赛定义请注意,除非另有说明,VEX EDR挑战赛 “攻城易帜” 的竞赛手册第二章“赛局”中的所有定义均适用于机器人技能挑战赛。
手控技能挑战赛 – 每局手控技能挑战赛包含60秒的手动控制时段,没有自动赛时段。
赛队可选择提前结束机器人的运行,但此运行仍算作正式的。
自动技能挑战赛 – 每局自动技能挑战赛包含60秒的自动赛时段,没有手动控制时段。
赛队可选择提前结束机器人的运行,但此运行仍算作正式的。
机器人技能赛预装 – 在技能赛赛局开始时,必须在场地上放置一(1)个弹球,且满足如下条件,见(<RSC2>)。
∙机器人技能赛预装接触机器人。
∙机器人技能赛预装完全置于场地围边内。
机器人技能赛 – 单局手控技能挑战赛或自动技能挑战赛。
机器人技能挑战赛规则请注意,除非另有说明,竞赛手册第二章“赛局”中的所有规则均适用于机器人技能挑战赛。
<RSC1>每局机器人技能赛开始时,机器人必须按如下方式放置:1.接触联队启动区,赛队可选择任意颜色的联队启动区。
然而,上场队员只允许在与机器人初始位置同色的联队站位。
2. 不接触任何其他的场地泡沫垫或非机器人技能赛预装的移动道具。
2023-2024竞赛手册 1.0版注:本文内容仅为中文翻译,如有出入请以英文原文为准目录第一章序言引言 (1)第二章赛局场地概览 (6)赛局定义 (8)特定赛局定义 (12)记分 (19)安全规则 (23)通用赛局规则 (24)特定赛局规则 (31)第三章机器人验机规则 (38)第四章赛事锦标赛定义 (51)锦标赛规则 (54)版本记录0.1版 – 2023年4月29日(美国时间)• 初版发布检索指南记分规则(第19-22页)<SC1> 赛局结束后评判所有得分状态<SC2>自动时段结束后立即评判自动时段奖励分<SC3>Goal内得分的标准<SC4> 进攻区的标准<SC5> 联队Triball<SC6> 提升等级的分值<SC7> 自动获胜分安全规则(第23页)<S1>安全第一<S2>留在场地内<S3>佩戴护目镜通用赛局规则(第24-30页)<G1>尊重每个人<G2>VEX VRC挑战赛是以学生为中心的项目<G3>适用基本常识。
<G4> 机器人须代表赛队的技能水平<G5>机器人赛局启动尺寸限制<G6>保持机器人的完整<G7> 不要将机器人锁定在场地上<G8> 只有上场队员且只能在其联队站位<G9> 不接触场地<G10> 遥控器须与场控保持连接<G11> 自动及无人介入<G12> 所有规则适用于自动赛时段<G13> 不要损坏其他机器人,但要准备好防御<G14> 进攻性机器人为“判罚受益方”<G15> 不能迫使对手犯规<G16> 牵制不能超过5次计数<G17> Triball用于进行比赛特定赛局规则(第31-37页)<SG1>开始赛局<SG2> 水平展开受到限制<SG3> 保持Triball在场地内<SG4> 每台机器人有1个联队Triball作为预装<SG5> 远离Goal上的网<SG6> 在特定条件下,赛局期间可以安全地引入赛局导入Triball<SG7> 最多持有一(1)个Triball<SG8> 在达成翻倍之前,远离对方的Goal<SG9> 自动赛留在己方区域<SG10> 自动赛期间进入中立区,风险自负<SG11> 提升的机器人受到保护验机规则(第38-50页)<R1>每支赛队一台机器人<R2>机器人必须代表赛队的技能水平<R3>机器人须验机合格<R4> 机器人的尺寸须小于18" (457.2 mm)×18" (457.2 mm)×18" (457.2 mm) <R5> 机器人必须安全<R6> 机器人使用VEX V5系统搭建<R7> 特定的非VEX零件允许使用<R8> 允许使用装饰物<R9> 官方注册队号须在机器人的队牌上展示<R10> 比赛结束后释放Triballs<R11> 机器人使用一个主控器<R12>电机和气动装置总的功率有限制<R13> 仅允许VEX电池作为电源<R14> 不允许对电子和气动件进行任何改动<R15> 大部分对非电子件的改动是允许的<R16> 机器人须使用VEXnet<R17> 给天线留些空间<R18> 允许限量使用定制塑料<R19> 允许限量使用胶带<R20> 允许使用特定的非VEX紧固件<R21> 新的VEX 零件合规<R22> 气动有限制<R23> 每台机器人使用一到两个遥控器<R24> 允许自制V5智能线缆<R25> 电源开关易接触<R26> 使用“竞赛模板”编程<R27> 偶然和蓄意违反机器人规则间的区别锦标赛规则(第54-63页)<T1>比赛中,主裁判对规则有最大裁决权限<T2>主裁判须有资格<T3>上场队员可立即向主裁判提出申诉<T4>赛事伙伴对赛事期间所有非比赛的决定拥有最终权力<T5> 学生须由成人陪同<T6> 赛队的机器人或上场队员须参加每局比赛<T7> 场地上的机器人须做好比赛准备<T8> 重赛只在极少情况下允许<T9> 取消资格<T10>淘汰赛中每支联队有一次暂停机会<T11>考虑场地的微小误差<T12>赛事伙伴可决定是否修复场地<T13>红方联队可最后放置机器人<T14>资格赛按照对阵表进行<T15>每支赛队至少参加6场资格赛<T16>赛队的资格赛排名用于联队选配<T17>资格赛排名和决胜局<T18>派一名赛队代表进行联队选配<T19>赛队只能被邀请一次加入一支联队<T20>淘汰赛按对阵图进行<T21>淘汰赛为“先胜一局”及“三局两胜”混合制<T22>小型赛事会有较少的淘汰赛联队<T23>竞赛场地须相互一致<T24>可能使用三种场控<T25>可能使用两种场地围栏第一章序言引言本节介绍VEX机器人竞赛和本届的 VRC 挑战赛 Over Under。
2016第九届VEX世界机器人锦标赛规则之“逐星之旅”2016年4月21日,中国码高代表队参加了在美国肯塔基州、路易斯维尔拉举行的VEX世界锦标赛。
在之前的2016VEX世界锦标赛选拔赛中码高代表队成绩突出,获得参最终参赛资格。
此次参赛的有20多个国家,上千支参赛队伍。
赛场战况相当火热,码高代表队的队员们经过异常激烈的比赛后,取得了优异的成绩。
下面举例说明本届 VEX 机器人的“逐星之旅”比赛,与比赛的说明和规则。
比赛说明:比赛场地如下图所示。
每场有两支联队(红队、蓝队)进行比赛,联队各由两支参赛队组成。
游戏目标是,通过把你的星星和立方体放到指定得分区,和在爬升区使你的机器人悬挂,以获得比你的对手更多的得分。
在自动比赛时段得分多的联队将获得奖励分。
图 1:赛场示意图场上共有 28 个得分物品,24 个星星,4 个立方体。
每个机器人将会在比赛开始前预装一个星星。
在比赛最后 30 秒,每个联队可以由操作手装填一个立方体。
20 个星星和 2 个立方体放置位置如图。
每个联队有一个悬挂杆,且只有一台机器人能够悬挂。
注:本节的说明仅仅提供一个对比赛直观的说明。
参关于准确的场地尺寸、完整的场地材料清单、场地的搭建、低成本的场地等,参赛队应查阅附录 A 中的正式场地规格。
围栏上的星星星星蓝队预装物(2X)围栏上的星星(4X)蓝队操作手装填物(1X)红队操作手装填物(1X)星星(3X)星星星星(3X)蓝队悬挂杆星星围栏上的星星红队悬挂杆立方体立方体星星蓝队预装物(2X)红色联队操作台蓝色联队操作台红色联队启动区蓝色联队启动区蓝色联队远区红色联队近区红色联队远区自然区蓝色联队远区游戏说明成人——不符合“学生”定义的人。
联队——预先指定的两支参赛队组成的团队,在一场比赛中协同工作。
联队启动区——供机器人启动的有色(红或蓝)指定区域。
联队操作台——在比赛中,供参赛队伍操作手站立的指定区域。
自动时段——比赛开始的前 15 秒(0:15)的时段,机器人依靠传感器和队伍提前设定的程序自主行动。
工程机器人搭建方案模板一、项目背景随着工程行业的发展,对于施工工地的效率和安全性要求越来越高。
传统的施工方式存在一定的问题,包括劳动强度大、安全风险高、施工周期长等。
为了解决这些问题,工程机器人作为一种新型的施工工具,具有良好的应用前景。
因此,开发一种适用于工程施工的机器人将有助于提高工程施工的效率和安全性。
二、项目目标开发一种功能完善的工程机器人,能够实现工地布料、砌砖等基本施工功能,提高施工效率,减少人力成本,改善施工安全环境。
三、研究方案1. 机器人搭建方案1.1 机器人结构设计1.2 机器人动力系统设计1.3 机器人控制系统设计1.4 机器人传感器系统设计2. 机器人施工功能实现2.1 布料功能实现2.2 砌砖功能实现2.3 其他功能实现3. 机器人性能测试3.1 机器人的工作效率测试3.2 机器人的安全性能测试3.3 机器人的稳定性能测试四、机器人搭建方案详解1. 机器人结构设计工程机器人的结构设计是整个项目的关键,需要考虑到施工功能的实现、机器人的稳定性和安全性。
机器人的结构设计应该符合工程施工的实际需求,同时要兼顾机器人的自身重量和尺寸,以便在施工场地上自由移动。
2. 机器人动力系统设计机器人的动力系统需要满足机器人在施工过程中的动作需求,包括布料、砌砖等工作功能的实现。
动力系统应该具备足够的功率和稳定性,以确保机器人能够在各种工程环境下工作。
3. 机器人控制系统设计机器人的控制系统是机器人的大脑,它负责指挥机器人的动作和工作。
控制系统需要具备良好的适应性和智能化,能够根据环境的变化做出相应的调整,以保证机器人能够正常工作。
4. 机器人传感器系统设计机器人的传感器系统用于感知周围环境,保障机器人在施工过程中的安全。
传感器系统需要包括各种传感器,如激光传感器、摄像头等,能够实时监测机器人的工作环境,避免发生意外事故。
5. 机器人施工功能实现机器人的施工功能是整个项目的核心,包括布料、砌砖等基本施工功能。
VEX一网打尽机器人拼装说明书名称:ARM7主控器配套遥控器 数量:1 pc 名称:2.4G USB适配器 数量:2 pcs名称:履带套装 数量:1 Set 名称:加强履带套装 数量:1 Set名称:中车轮毂 + 4”强力车胎 数量:2 pcs名称:高力矩马达(含马达控制器)数量:10 pcs一: 拼装所需物料清单名称:ARM7主控器 数量:1 pc名称:4”双排大万向轮 数量:4 pcs名称:四方轴(3"/95mm/115mm/12”) 数量:19pcs名称:限位杯士 数量:50pcs名称:轴承片 数量:53pcs名称:塑料定位套(4.6mm内径) 数量:48pcs 名称:平面钢板(铁) 数量:10pcs名称:自锁螺母 数量:110pcs 名称:84齿直齿齿轮 数量:4 pcs名称:12齿金属直齿齿轮 数量:12pcs名称:60齿直齿齿轮 数量:10pcs名称:36齿直齿齿轮 数量:2pcs名称:平面钢条(铁) 数量:2pcs名称:结构件套装 数量:1Set名称:加长铝金属件套装 数量:1Set名称:加长铝金属件套装 数量:1Set 名称:六角螺母柱 1/2” 数量:8pcs名称:六角螺母柱 1” 数量:30pcs名称:六角螺母柱 2” 数量:12pcs名称:内六角螺丝#8-32 1/4" 数量:127pcs 名称:内六角螺丝#8-32 1/2" 数量:74pcs名称:内六角螺丝#8-32 3/4" 数量:6 pcs名称:7.2V 3000mAh电池 数量:1 pc名称:7.2V 3000mAh电池充电器 数量:1 pc名称:AAA镍氢充电电池 数量: 1pc名称:AAA/AA电池充电器 数量:1pc名称:Y型线15CM 数量: 2pcs名称:扎带套装 数量: 1袋名称:高级工具套装A 数量:1 Set4”双排大万向轮 x 412.5”铝材C型钢 x 112.5”铝材方形架 x 417.5”铝材角钢 x 217.5”铝材宽C型钢x 1高力矩马达(含马达控制器) x 2四方轴 3”x 4六角螺母柱1/2” x 8六角螺母柱1” x 8六角螺母柱2” x 4轴承片 x 8限位杯士 x 6塑料定位套4.6mm x 16内六角螺丝#8-32 1/4” x 48内六角螺丝#8-32 1/2" x 12自锁螺母x 23高力矩马达(含马达控制器) x 2四方轴 95mm (用12”所锯得) x 2四方轴 3”x 2第一步(底盘安装)二:拼装步骤如下17.5”铝材角钢 x 2平面钢板(铁)x 4履带驱动轮(履带套装中) x 4履带条165CM(履带套装中) x 1加强履带套装x 1平面钢条(合金) x 4平面钢条(铁) x 2六角螺母柱1” x 6六角螺母柱2” x 4轴承片 x 10限位杯士 x 12塑料定位套4.6mm x 8内六角螺丝#8-32 1/4” x 30内六角螺丝#8-32 1/2" x 8内六角螺丝#8-32 3/4” x 4自锁螺母x 22高力矩马达(含马达控制器) x 4四方轴 115mm (用12”所锯得) x 2四方轴 95mm (用12”所锯得) x 2四方轴 3”x 4中车轮毂(车轮套装中) x 24”强力车胎x 2第二步(吸卷球履带安装)平面钢板(铁) x 660齿直齿齿轮 x 636齿直齿齿轮x 212齿金属直齿齿轮 x 4六角螺母柱1”x 16六角螺母柱2” x 4轴承片 x 26限位杯士x 12平面钢介子(结构件套装中) x 20塑料定位套4.6mm x 10内六角螺丝#8-32 1/4” x 43内六角螺丝#8-32 1/2" x 38内六角螺丝#8-32 3/4” x 2自锁螺母x 43第三步(射球装置安装)高力矩马达(含马达控制器) x 2四方轴 12” x 312.5”铝材C型钢 x 317.5”铝材C型钢 x 184齿直齿齿轮 x 460齿直齿齿轮x 412齿金属直齿齿轮 x 4平面钢介子(结构件套装中)x 10轴承片 x 9限位杯士 x 20塑料定位套4.6mm x 14内六角螺丝#8-32 1/4” x 6内六角螺丝#8-32 1/2" x 14自锁螺母 x 20ARM7主控器x 1ARM7主控器配套遥控器 x 12.4G USB适配器x 2AAA镍氢充电电池(充满电) x 67.2V 3000mAh电池(充满电)x 1内六角螺丝#8-32 1/2" x 2自锁螺母 x 2扎带x 20第四步(升降装置安装)第五步(安装主控器及插线端子,打扎带)。
VEX 机器人软件编程教程一、使用注意事项❖如果是没有购买序列号的用户,安装了软件,打开软件时会弹出一个注册的窗口,中文版点暂不注册按钮便可以试用。
英文版点Run in Evaluation Mode按钮便可试用;英文1.0版试用30天,英文2.0版只能试用7天;中文2.0版15天;❖如果是购买了序列号的用户,在注册的时候需要联网注册,每个序列号也只能在一台电脑上使用,英文版如果换了电脑再使用该序列号注册,那么该系列号就不可用了,2.0中文版一个序列号也只能一台电脑注册,如要换电脑注册可以点菜单栏→帮助→ 注销,然后在另一台电脑上就可以再次使用该序列号了;❖如果是没有购买序列号的用户,只要一装上软件,便自动与系统硬件绑定,试用期到了以后即使把软件卸载了在重装也不能继续试用,建议先用备份工具备份系统,然后才安装中英文版软件,这样软件过期了以后,只需要把系统还原,在重装VEX软件即可继续试用;❖英文版软件比中文1.0版软件稳定,中文1.0版软件存在一些错误,不建议使用中文1.0版;❖VEX编程软件有中文版和英文版两个版本(中文和英文分别都有1.0版本和2.0版本),两个版本不能混用,不要既下载中文版编的程序到主控器,又下载英文版编的程序到主控器,这样会损坏主控器的底层程序,严重时会导致主控器的某些芯片不可用,从而导致主控器不能使用;❖中文版和英文版的程序和代码都不能用对方的的软件相互打开编辑❖中文1.0版软件编好的程序不能保存到C盘(包括桌面),否则会导致程序不能打开或者出现错误;中文2.0版电脑的任何地方都可以保存,以文件夹的形式保存,注意在同一个程序文件夹下不能在保存别的程序,否则在打开程序时会出错并关闭自动关闭;❖中文1.0版软件在每次下载程序之前都要先保存→编译→链接→然后再下载,然后选择端口;❖查看下载线使用的COM口的方法是:我的电脑→右键→属性→硬件→设备管理器→端口(COM和LPT)→ Prolific USB-to-Serial Comm Port (com3)最后这一项的com3就是当前VEX下载线使用的端口;然后在软件里面选择你查看到的端口即可下载程序到主控器,具体方法后面有详细介绍;❖ 2.0中英版软件可以定义子程序,1.0中英版软件不能定义子程序;❖ 2.0中英版软件中可以定义全局变量和局部变量,1.0中英版的软件所有变量都是全局变量;❖ 1.0中英版软件没有中断、继续、返回模块,2.0中英版软件中有。