距离分类器
- 格式:pptx
- 大小:184.66 KB
- 文档页数:14


眼底图像的病变辨别1.原理论述1. 1 序言眼底病变包含了视网膜,脉络膜,视神经及玻璃体的炎症,肿瘤,各种血管的病变,各样变性疾病及多系统疾病惹起的眼部病变。
不单种类众多,并且对视功能伤害较大。
当前常有而又影响视功能的眼底疾病有糖尿病视网膜病变,老年性黄斑病变,视网膜静脉堵塞等等。
鉴于以上眼底图像关于疾病的诊疗的意义,本文章联合了正常和病态的眼底图像各50 幅,采纳模式识其他方法先对两种图像各25 幅加以训练,并进行特点值提取,在使用节余的图像进行分类方法的评估,本文意在运用模式辨别方法在医学领域应用。
1. 2 流程说明本次模式识其他过程是:有已知样本状况的监察模式辨别分类器设计(训练)信息的获得与预办理特点的提取与选择分类器设计(训练)图 1 监察模式识其他流程图关于图像的预办理主要分红两个步骤:无效地区的填补和图像的对照度加强。
病变图像无效地区Retinex预办理后的填补对照加强图像正常图像图 2 图像的预办理的流程图关于所给的病变图像,有部分的图像边缘是无效的黑色,这关于下一步对照度加强会带来影响,此外,在图像的特点提取上也会造成影响。
假如先期部进行办理,那么,后期的分别器中则需要加入判断构造对无效地区的辨别,这无疑增添特点提取的运转时间。
所以,这里采纳了一种简单的方法对向地区填补图像的R、 G、B 均值。
做法是先读取有效的R、G、B 值,并存入数组,下一步将对数组中的值求均匀即可获得该图像有效R、 G、 B 的均匀值,在向无效地区填补即可。
图 3 无效填补前图4无效填补后接下来,对图像的办理是:对照度加强。
因为摄影的光芒对眼底图像质量起侧重要作用,所以,关于明场和暗场下的蛋白质与血液的成像都有所不一样,为了加强二者在图像中的辨别度,采纳的是Retinex图像加强的方法,设置蛋白质和血液通道,分别对R、G、 B 的标准差进行设定,从而获得预办理后的图像。
而后,再对图像的蛋白质和血液挑选,形成25*2 的特点矩阵。
第二章统计模式识别(一)(几何分类法)目录统计分类的基本思想模板匹配法及其数学描述模式的相似性度量及距离分类法几何分类法(线性可分时)几何分类法(线性不可分时)小结1.模式与模式识别––统计分类的基本思想b公设一:可描述性存在一个有代表性的样本集可供使用,以便获得一个问题范围。
公设二:可分性一个“简单”模式,具有表征其类别的类属性特征。
{(),,()}i kf fω=⊂ΩLX X公设三:备注:公设三中的特征是模式分类和识别统计分类的基本思想d公设四:特征独立性一个“复杂”模式具有简单的组成部分,它们之间存在确定的关系。
模式被分解成这些组成部分,且它们有一个确定的而不是任意的结构。
公设五:模式相似性如果两个模式的特征或其简单的组成部分仅有微小差别,则称两个模式是相似的。
–1–8讲义:模式识别导论第二章:统计模式识别(一)统计分类的基本思想g线性判别分类的基本方法–将样本的各类特征向量定位于特征空间后设法找出分界线(n=2时)或分界面(n>2时)。
–把特征空间分割成若干区域,每个区域对应于一个类别–对于一个未知类别的模式落在那个区域,就被分到那个类别中。
注意:12(,,,)T n X x x x =L 特征维数增加,分类的复杂度提高;样本的类别增多,分类的复杂度也提高。
目录2. 模板匹配法及其数学描述模板匹配法(Template Matching)是一种最原始、最基本的方法,它是一种统计识别的方法。
如果模板与样品上的绝大多数单元相匹配,则称“匹配的好”,反之称“匹配不好”,并取匹配最好的作为识别结果。
模板匹配的几种形式光学模板匹配:电子模板匹配(模拟灰度):电子模板匹配(数字灰度):参考书上的内容模板匹配的实现以文字识别为例,将每一个字建立一个模板P ,对一未知模式X ,逐个与模板匹配求出最小距离,然后进行识别即可,详细过程如下:1x 2x模板匹配的实现(续)1. 计算:K 为字符库中的字数。
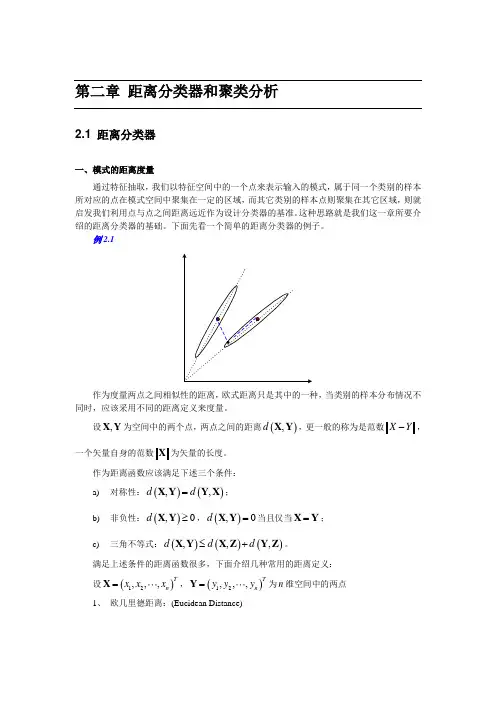
第二章 距离分类器和聚类分析2.1 距离分类器一、模式的距离度量通过特征抽取,我们以特征空间中的一个点来表示输入的模式,属于同一个类别的样本所对应的点在模式空间中聚集在一定的区域,而其它类别的样本点则聚集在其它区域,则就启发我们利用点与点之间距离远近作为设计分类器的基准。
这种思路就是我们这一章所要介绍的距离分类器的基础。
下面先看一个简单的距离分类器的例子。
例2.1作为度量两点之间相似性的距离,欧式距离只是其中的一种,当类别的样本分布情况不同时,应该采用不同的距离定义来度量。
设,X Y 为空间中的两个点,两点之间的距离(),d X Y ,更一般的称为是范数X Y -,一个矢量自身的范数X 为矢量的长度。
作为距离函数应该满足下述三个条件: a) 对称性:()(),,d d =X Y Y X ;b) 非负性:(),0d ≥X Y ,(),0d =X Y 当且仅当=X Y ; c) 三角不等式:()()(),,,d d d ≤+X Y X Z Y Z 。
满足上述条件的距离函数很多,下面介绍几种常用的距离定义: 设()12,,,Tn x x x =X ,()12,,,Tn y y y =Y 为n 维空间中的两点1、 欧几里德距离:(Eucidean Distance)()()1221,ni i i d x y =⎡⎤=-⎢⎥⎣⎦∑X Y2、 街市距离:(Manhattan Distance)()1,ni i i d x y ==-∑X Y3、 明氏距离:(Minkowski Distance)()11,mnm i i i d x y =⎡⎤=-⎢⎥⎣⎦∑X Y当2m =时为欧氏距离,当1m =时为街市距离。
4、 角度相似函数:(Angle Distance)(),T d ⋅=X YX Y X Y1nTi i i x y =⋅=∑X Y 为矢量X 和Y 之间的内积,(),d X Y 为矢量X 与Y 之间夹角的余弦。

knn分类器的原理
KNN(K-Nearest Neighbor)分类器是一种基于实例的学习算法,它将新的样本数据与已知分类的数据进行比较,通过计算距离来确定新样本所属的分类。
KNN分类器的原理可以分为以下几个步骤:
1. 收集数据
首先需要收集一组已知分类的数据集,包括特征和标签。
特征是描述数据的属性,标签是每个数据所属的类别。
2. 计算距离
对于新样本,需要计算它与已知数据集中每个样本之间的距离。
常用的距离度量方法有欧氏距离、曼哈顿距离和闵可夫斯基距离等。
3. 确定K值
K值是指在计算距离时选择最近邻居数量。
通常情况下,K值越小则模型越复杂、容易过拟合;K值越大则模型越简单、容易欠拟合。
一般通过交叉验证来确定最优的K值。
4. 找到K个最近邻居
根据计算出来的距离,找到与新样本最接近(即距离最短)的K个邻居。
5. 统计邻居类别出现频率
对于这K个邻居,统计它们所属的类别出现的频率。
通常采用投票法,即将K个邻居中出现次数最多的类别作为新样本的预测类别。
6. 对新样本进行分类
根据统计结果,将新样本归入出现频率最高的类别中。
KNN分类器的优点是简单易用、适用于多分类问题、对异常值不敏感等。
缺点是需要大量存储训练数据、计算复杂度高、对样本分布不均
匀敏感等。
因此,在实际应用中需要根据具体情况选择合适的算法。

区域遥感影像的监督分类方法引言遥感影像是指通过航空器、卫星等远距离进行非接触无损观测、记录的图像。
区域遥感影像分类是遥感图像处理的重要应用之一,它通过对遥感影像进行数字解析和模式识别,将图像中的不同地物按照一定的分类体系进行准确划分。
本文将介绍区域遥感影像的监督分类方法。
一、监督分类概述监督分类是指在训练样本的指导下,通过计算机自动对图像进行分类。
首先需要选取具有代表性的样本区域,然后进行特征提取和分类器训练。
最后将分类结果应用到整个图像上。
二、特征提取特征提取是依据遥感影像的光谱、纹理、形状等特征,将图像转化为数值描述的过程。
常见的特征包括光谱特征、纹理特征和形状特征。
1. 光谱特征光谱特征是通过分析遥感影像不同波段的光谱反射率或辐射亮度,提取不同地物类别的差异性。
可以使用的光谱特征包括单波段特征、双波段特征和多波段特征。
2. 纹理特征纹理特征是描述图像中局部区域的统计特征,对于纹理丰富的地物分类具有较好的效果。
常用的纹理特征包括灰度共生矩阵、局部二值模式和小波变换等。
3. 形状特征形状特征是描述地物边界形状和轮廓的特征。
常用的形状特征包括面积、周长、圆形度和椭圆度等。
三、分类器选择分类器是监督分类中的关键组成部分,其作用是将特征提取得到的各种属性与训练样本进行比较和判断,从而进行分类。
常见的分类器包括最小距离分类器、支持向量机和随机森林等。
1. 最小距离分类器最小距离分类器是基于样本数据之间的距离进行分类判别的方法,将测试样本分配给最邻近的训练样本。
最小距离分类器简单有效,但对于样本分布不均匀的情况效果较差。
2. 支持向量机支持向量机是一种广泛应用于监督分类中的机器学习方法。
它通过划分不同类别的样本,使得样本与分类决策边界的距离最大化。
3. 随机森林随机森林是一种集成学习方法,将多个决策树分类器组合起来进行分类。
它能够有效地处理高维数据和具有噪声的遥感影像。
四、分类结果评价分类结果的评价是监督分类中非常重要的一步,它能够评估分类方法的准确性和可靠性。

近邻分类分类器设计一、设计任务对“data3.m”数据,采用剪辑法、压缩法生成参考集,近似描绘其决策面,并用所有数据测试其分类效果。
二、设计原理1、最近邻法最近邻分类器(nearest neighborhood classifier, nnc): 最小距离分类器的一种极端的情况,以全部训练样本作为代表点,计算测试样本与所有样本的距离,并以最近邻者的类别作为决策。
最初的近邻法是由Cover 和Hart 于1968年提出的,随后得到理论上深入的分析与研究,是非参数法中最重要的方法之一。
最近邻法:将与测试样本最近邻样本的类别作为决策的结果。
对一个C 类别问题,每类有 i N 个样本,1,2,i C =,则第i 类i ω的判别函数为:()min ||||,1,2,,k i i i k g x x x k N =-= (1)因此,最近邻决策规则:若 ()min (),1,2,j i i g x g x i c ==(2)则决策 j x ω∈由上可以看出最近邻法在原理上最直观,方法上也十分简单,但明显的缺点就是计算量大,存储量大。
2、k -近邻法k -近邻法即为最近邻法的扩展,其基本规则是,在所有 N 个样本中找到与测试样本的k 个最近邻者,其中各类别所占个数表示成i k ,1,2,i C =,定义判别函数为:(),1,2,i i g x k i c == (3)因此,k -近邻决策规则:若 ()max j i ig x k = (4)则决策 j x ω∈k -近邻一般采用k 为奇数,跟投票表决一样,避免因两种票数相等而难以决策。
决策规则为:arg (),1,,i i j maxg x i c ==3、改进的近邻法近邻法的一个严重问题是需要存储全部训练样本,以及繁重的距离计算量。
从而提出了两类改进的方法:一种是对样本集进行组织与整理,分群分层,尽可能将计算压缩到在接近测试样本邻域的小范围内,避免盲目地与训练样本集中每个样本进行距离计算。

基于2DPCA的人脸识别算法研究摘要人脸识别技术是对图像和视频中的人脸进行检测和定位的一门模式识别技术,包含位置、大小、个数和形态等人脸图像的所有信息。
由于近年来计算机技术的飞速发展,为人脸识别技术的广泛应用提供了可能,所以图像处理技术被广泛应用了各种领域。
该技术具有广阔的前景,如今已有大量的研究人员专注于人脸识别技术的开发。
本文的主要工作内容如下:1)介绍了人脸识别技术的基础知识,包括该技术的应用、背景、研究方向以及目前研究该技术的困难,并对人脸识别系统的运行过程以及运行平台作了简单的介绍。
2)预处理工作是在原始0RL人脸库上进行的。
在图像的预处理阶段,经过了图象的颜色处理,图像的几何归一化,图像的均衡化和图象的灰度归一化四个过程。
所有人脸图像通过上述处理后,就可以在一定程度上减小光照、背景等一些外在因素的不利影响。
3)介绍了目前主流的一些人脸检测算法,本文采用并详细叙述了Adaboost人脸检测算法。
Adaboost算法首先需要创建人脸图像的训练样本,再通过对样本的训练,得到的级联分类器就可以对人脸进行检测。
4)本文介绍了基于PCA算法的人脸特征点提取,并在PCA算法的基础上应用了改进型的2DPCA算法,对两者的性能进行了对比,得出后者的准确度和实时性均大于前者,最后将Adaboost人脸检测算法和2DPCA算法结合,不仅能大幅度降低识别时间,而且还相互补充,有效的提高了识别率。
关键词:人脸识别 2DPCA 特征提取人脸检测2DPCA Face Recognition Algorithm Basedon The ResearchAbstract:Face recognition is a technology to detect and locate human face in an image or video streams,Including location, size, shape, number and other information of human face in an image or video streams.Due to the rapid development of computer operation speed makes the image processing technology has been widely applied in many fields in recent years. This paper's work has the following several aspects:1)Explained the background, research scope and method of face recognition,and introduced the theoretical method of face recognition field in general.2)The pretreatments work is based on the original ORL face database. In the image preprocessing stage, there are the color of the image processing, image geometric normalization, image equalization and image gray scale normalization four parts. After united processing, the face image is standard, which can eliminate the adverse effects of some external factors.3)All kinds of face detection algorithm is introduced, and detailed describing the Adaboost algorithm for face detection. Through the Adaboost algorithm to create a training sample,then Training the samples of face image,and obtaining the cascade classifier to detect human face.4)This paper introduces the facial feature points extraction based on PCA ,and 2DPCA is used on the basis of the PCA as a improved algorithm.Performance is compared between the two, it is concluds that the real time and accuracy of the latter is greater than the former.Finally the Adaboost face detection algorithm and 2DPCA are combined, which not only can greatly reduce the recognition time, but also complement each other, effectively improve the recognition rate.Key words:Face recognition 2DPCA Feature extraction Face detection目录第1章前言 (1)1.1 人脸识别的应用和研究背景 (1)1.2 人脸识别技术的研究方向 (2)1.3 研究的现状与存在的困难 (3)1.4 本文大概安排 (4)第2章人脸识别系统及软件平台的配置 (4)2.1 人脸识别系统概况 (4)2.1.1 获取人脸图像信息 (5)2.1.2 检测定位 (5)2.1.3 图像的预处理 (5)2.1.4 特征提取 (6)2.1.5 图像的匹配与识别 (6)2.2 OpenCV (6)2.2.1 OpenCV简介 (6)2.2.2 OpenCV的系统配置 (7)2.3 Matlab与图像处理 (8)第3章图像的检测定位 (8)3.1 引言 (8)3.2 人脸检测的方法 (8)3.3 Adaboost算法 (9)3.3.1 Haar特征 (10)3.3.2 积分图 (10)3.3.4 级联分类器 (11)第4章图像的预处理 (13)4.1 引言 (13)4.2 人脸图像库 (13)4.3 人脸预处理算法 (14)4.3.1 颜色处理 (14)4.3.2几何归一化 (15)4.3.3直方图均衡化 (16)4.3.4灰度归一化 (18)4.4 本章小结 (19)第5章图像的特征提取与识别 (19)5.1 引言 (19)5.2 图像特征提取方法 (20)5.2.1基于几何特征的方法 (20)5.2.2基于统计的方法 (20)5.2.3弹性图匹配(elastic graph matching) (21)5.2.4神经网络方法 (21)5.2.5支持向量机(SVM)方法 (22)5.3 距离分类器的选择 (22)5.4 PCA算法的人脸识别 (24)5.5 二维主成分分析(2DPCA) (25)5.5.1 2DPCA人脸识别算法 (25)5.5.2 特征提取 (27)5.5.3 分类方法 (27)5.5.4 基于2DPCA的图像重构 (28)5.6 实验分析 (28)第6章总结与展望 (33)6.1 本文总结 (33)6.2 未来工作展望 (33)致谢 (34)参考文献: (35)第1章前言1.1 人脸识别的应用和研究背景随着社会科学技术的发展进步,特别是最近几年计算机的软硬件技术高速发展,以及人们越来越将视野集中到快速高效的智能身份识别,使生物识别技术在科学研究中取得了重大的进步和发展。
ENVI中监督分类方法及参数说明ENVI 中监督分类方法及参数说明(2011-10-10 09:56:27)标签:转载分类:ENVI/IDL学习原文地址:ENVI中监督分类方法及参数说明作者:ENVIIDL根据分类的复杂度、精度需求等选择一种分类器。
在主菜单->Classification-> Supervised->分类器类型(如表 6.1),此外还包括应用于高光谱数据的波谱角(Spectral Angle Mapper Classification)、光谱信息散度(Spectral Information Divergence Classification)和二进制编码(Binary Encoding Classification)分类方法。
表6.1 六种监督分类器说明分类器说明平行六面体(Parallelpiped)根据训练样本的亮度值形成一个n维的平行六面体数据空间,其他像元的光谱值如果落在平行六面体任何一个训练样本所对应的区域,就被划分其对应的类别中。
平行六面体的尺度是由标准差阈值所确定的,而该标准差阈值则是根据所选类的均值求出。
最小距离(Minimum Distance)利用训练样本数据计算出每一类的均值向量和标准差向量,然后以均值向量作为该类在特征空间中的中心位置,计算输入图像中每个像元到各类中心的距离,到哪一类中心的距离最小,该像元就归入到哪一类。
马氏距离(Mahalanobis Distance)计算输入图像到各训练样本的马氏距离(一种有效的计算两个未知样本集的相似度的方法),最终统计马氏距离最小的,即为此类别。
最大似然(Likelihood Classification)假设每一个波段的每一类统计都呈正态分布,计算给定像元属于某一训练样本的似然度,像元最终被归并到似然度最大的一类当中。
神经网络(Neural Net Classification)指用计算机模拟人脑的结构,用许多小的处理单元模拟生物的神经元,用算法实现人脑的识别、记忆、思考过程应用于图像分类。
统计信号处理统计信号处理是利用数学模型和统计学方法来分析和处理信号的一种科学领域。
它的研究内容包括对信号的基本特征进行统计分析、对信号进行滤波去噪、对信号进行特征提取和模式识别等方面。
本文将从基础概念、信号分析、滤波去噪、特征提取和模式识别等方面介绍统计信号处理的相关内容。
一、基础概念1. 信号的定义信号是指在时间上或者空间上,随时间或者空间变化的物理量。
信号可以是电信号、声信号、图像信号、生物信号等。
信号具有多种不同的特征,如幅度、频率、相位、周期等。
2. 随机信号和确定信号随机信号是指其幅度、相位、频率、周期等各种特征都是随机变量的信号,如噪声信号等。
确定信号是指其幅度、相位、频率、周期等各种特征都是确定的信号,如纯正弦信号等。
3. 时域和频域时域是指信号随时间变化的域,频域是指信号在频率上分布的域。
信号可以通过傅里叶变换从时域转换到频域,通过反傅里叶变换从频域转换到时域。
二、信号分析1. 自相关函数和互相关函数自相关函数是指计算信号与其自身在时延上的相似度的函数,可以用来分析信号的周期性和相关程度。
互相关函数是指计算两个信号在时延上的相似度的函数,用来分析两个信号的相似程度和相位关系。
2. 谱分析谱分析是指通过傅里叶变换将信号从时域转换到频域,得到信号在频率上的分布情况。
谱分析可以用来分析信号的频率特征和频谱密度。
三、滤波去噪1. 低通滤波器和高通滤波器低通滤波器是指只允许低于某个频率的信号通过的滤波器,可以用来去除高频噪声。
高通滤波器是指只允许高于某个频率的信号通过的滤波器,可以用来去除低频噪声。
2. 中值滤波器和小波变换中值滤波器是一种基于统计的滤波器,通过将窗口内的数值排序并选取中间值作为输出来去除噪声。
小波变换是一种多分辨率分析技术,可以在不同的分辨率上分析信号,并去除噪声。
四、特征提取1. 傅里叶描述子和小波变换描述子傅里叶描述子是一种将信号分解成一组复杂正弦和余弦函数的方法,可以用来提取信号的周期性特征。
测绘技术中的遥感影像分类方法随着科技的不断进步,遥感影像技术在测绘领域中扮演着越来越重要的角色。
遥感影像分类方法是测绘技术中的一种重要手段,它可以将海量的遥感影像数据进行有效的分析和提取,为地理信息系统的建设和环境监测等提供重要数据支持。
本文将重点探讨测绘技术中的遥感影像分类方法。
遥感影像分类是通过对遥感影像数据进行分析和处理,将其划分为多个类别或类型的过程。
在测绘领域中,常用的遥感影像分类方法主要包括无监督分类和监督分类两种。
无监督分类是指在没有先验知识的情况下,通过对遥感影像数据的聚类分析,自动将其划分为多个不重叠的类别。
这种方法不需要用户提供任何样本点,但分类结果的准确性有待进一步验证和优化。
而监督分类则需要用户提供一定数量的样本点作为训练数据进行分类,通过建立分类器来预测其他未标注的像素点所属的类别。
在遥感影像分类中,常用的图像特征提取方法有光谱特征、纹理特征和形状特征等。
光谱特征是指通过分析遥感影像数据在不同波段上的亮度值来刻画地物的反射特性和光谱分布情况。
纹理特征则是指通过分析遥感影像中地物的纹理变化和细节特征来进行分类。
形状特征则是指通过分析地物的形状和几何结构来进行分类。
综合利用这些特征可以有效地提高遥感影像分类的准确性和稳定性。
除了传统的特征提取方法,近年来,深度学习在遥感影像分类中的应用也日益增多。
深度学习是一种模拟人类神经网络的计算模型,通过构建多层神经网络实现对遥感影像数据的自动学习和特征提取。
与传统的方法相比,深度学习可以在不同尺度和层次上提取图像中的空间、频域和光谱等多种特征,从而得到更准确和可靠的分类结果。
同时,深度学习还具备良好的泛化性能和鲁棒性,能够适应不同场景和数据的变化。
因此,深度学习在测绘技术中的遥感影像分类中有着广阔的应用前景。
此外,遥感影像分类的准确性和效率还与分类器的选择密切相关。
常用的分类器有最小距离分类器、最大似然分类器、支持向量机和人工神经网络等。
ENVI中监督分类方法及参数说明(2011-10-10 09:56:27)分类:ENVI/IDL学习标签:转载原文地址:ENVI中监督分类方法及参数说明作者:ENVIIDL根据分类的复杂度、精度需求等选择一种分类器。
在主菜单->Classification-> Supervised->分类器类型(如表 6.1),此外还包括应用于高光谱数据的波谱角(Spectral Angle Mapper Classification)、光谱信息散度(Spectral Information Divergence Classification)和二进制编码(Binary Encoding Classification)分类方法。
1. 平行六面体(1)在主菜单中,选择Classification->Supervised->Parallelpiped,在文件输入对话框中选择TM分类影像,单击OK按钮打开Parallelpiped参数设置面板(图6.4)。
(2)SelectClasses from Regions:单击Select All Items按钮,选择全部的训练样本。
(3)Set Max stdev from Mean:设置标准差阈值,有三种类型:l None:不设置标准差阈值;l Single Value:为所有类别设置一个标准差阈值;l Multiple Values:分别为每一个类别设置一个标准差阈值。
选择Single Value,值为3。
(4)单击Preview,可以在右边窗口中预览分类结果,单击Change View可以改变预览区域。
(5)选择分类结果的输出路径及文件名。
(6)设置Out Rule Images为Yes,选择规则图像输出路径及文件名。
(7)单击OK按钮执行分类。
图6.4 平行六面体分类器参数设置面板2. 最小距离(1)在主菜单中,选择Classification->Supervised-> Minimum Distance,在文件输入对话框中选择TM分类影像,单击OK按钮打开Minimum Distance参数设置面板(图6.5)。
数字图像处理与机器视觉——Visual C++与Matlab 实现– 428 – 论,而是将着眼于目前统计模式识别领域中十分活跃、和图像识别关系密切并且已在工程技术领域获得广泛应用的两种非常实用的分类器技术——人工神经网络(第12章)和支持向量机(第13章)。
11.3 最小距离分类器和模板匹配通过前面两节的学习,相信读者已经对模式识别和图像识别有了一定的认识,对其整体框架也有了大致的了解。
本节将讨论一种具体的分类技术——最小距离分类器,并附带介绍一种专门针对于图像内容匹配的基于相关的模板匹配技术。
11.3.1 最小距离分类器及其Matlab 实现1.理论基础最小距离分类又称最近邻分类,是一种非常简单的分类思想。
这种基于匹配的分类技术通过以一种原型模式向量代表每一个类别,识别时一个未知模式被赋予一个按照预先定义的相似性度量与其距离最近的类别,常用的距离度量有欧氏距离,马氏距离等。
下面我们以欧氏距离为例讲解最小距离分类器。
一种简单的做法是把每个类所有样本的平均向量作为代表该类的原型,则第i 类样本的代表向量为: 11,2,..,i i i i x w m x i W N Î==å (11-1)其中,N i 为第i 样本的数目,w i 表示第i 类样本的集合,总类别数为W 。
当需要对一个未知模式x 进行分类时,只需分别计算x 与各个i m (i =1,2,…,W )的距离,然后将它分配给距离最近的代表向量所代表的类别。
对于欧氏距离表示的x 与各个m i 的距离:()||||1,2,...,i i D x x m i W =-= (11-2)其中,||x -m i ||=(( x -m i )T ( x -m i )) 1/2,表示欧几里的范数,即向量的模。
我们在W 个D i (x )中找到最小的一个,不妨设为D i (x ),则x 属于第j 类。
下面让我们来看一个使用最小距离分类器的实例,请读者思考最小距离分类器具有怎样的决策边界。