基于spce061a单片机的音控智能机器人小车设计
- 格式:pdf
- 大小:277.62 KB
- 文档页数:4

本科毕业论文(设计)题目: 基于凌阳SPCE061A声控小车的设计院系:物理与电子信息科学系专业:电子信息科学与技术******学号:************指导教师:***教师职称:讲师填写日期:2011年5月10日摘要语音识别是一门复杂的技术,它不仅包括语音的录制、播放、识别,还涉及语音信号的采集、压缩编码和解码等各项技术。
以往做语音识别有一般有两种途径。
一种是采用单片机进行扩展设计,另一种是利用专门的语音处理芯片。
普通的单片机往往不能实现这么复杂的过程和算法,即使勉强实现也要加很多的外围器件。
SPCE061A是凌阳科技推出的一款16位μ'nSP结构的微控制器,论文对系统的硬件电路和软件设计进行了分析与设计。
该系统具有结构简单, 很高的性价比,便于推广和应用。
借助于SPCE061A提供的语音特色,外只需设计一个H桥电机驱动电路,就比较容易实现语音控制小车的前进、后退、左转、右转停车等基本功能;关键字:SPCE061A、语音识别、声控小车、单片机。
AbstractSpeech recognition is a complex technology, which includes not only voice recording, playback, recognition, speech signal is also involved in the collection, coding and decoding and other technologies. Speech recognition in the past have usually done in two ways. A microcontroller is used to extend the designer, and the other is the use of specialized voice processing chips. Often fail to achieve common SCM process and algorithm of this complexity, even if we manage to achieve a lot of peripheral devices also increases.Sunplus SPCE061A is the launch of a 16-bit microcontroller μ'nSP structure, the paper system of hardware and software design analysis and design. The system is simple, highly cost-effective, easy promotion and application.With SPCE061A provides voice features, just outside the design of a H bridge motor drive circuit, relatively easy to implement voice control for car forward, backward, turn left, turn right to parking and other basic functions;Keywords: SPCE061A; speech recognition; voice-activated car; microcontroller.目录前言 (1)第一章语音识别的发展及前景 (2)第一节语音识别的发展历史 (2)第二节语音识别技术的应用前景 (3)第二章凌阳音频 (5)第一节音频背景知识 (5)第二节语音压缩编码基础 (5)第三节常见的几种音频压缩编码 (6)第四节语音合成、辨识技术的介绍 (7)第三章凌阳SPCE061A单片机简介 (9)第一节音频压缩算法的编码标准及分类 (10)第二节凌阳常用的音频形式和压缩算法 (10)第三节凌阳语音的播放、录制、合成和辨识 (11)第四节语音识别系统结构 (11)第四章语音控制器总体设计 (13)第一节设计要求 (13)第二节 61板简介 (14)第三节小车车体简介 (15)第五章语音控制器硬件设计 (17)第一节电源设计 (17)第二节 SPCE061A最小系统 (18)第三节程序下载模块 (19)第四节声音采集模块 (20)第五节播音模块 (21)第六节电机驱动电路的设计 (21)第六章语音控制器软件设计 (23)第一节凌阳u'nSP IDE的项目结构 (23)第二节声音压缩 (24)第三节语音录制 (26)第四节语音播放 (27)第五节语音识别 (29)第七章程序设计 (30)第一节主程序设计 (30)第二节功能子程序设计 (32)第三节语音资源表配置 (36)结论 (37)致谢 (38)主要参考文献 (39)附录 (40)附录A 元器件清单 (40)附录B 61板电路图 (41)前言单片机作为计算机技术的一个重要分支、嵌入式系统的先头兵,广泛应用于工业控制、智能仪器、机电一体化、家用电器、智能产品、个人数字处理领域。
语音控制是最为直接的人机对话方式,而小车以其生动、典型、学习形式喜闻乐见、涉及知识面广等特点,可作为电子类专业同学们学习、实践的良好载体。
凌阳SPCE061A单片机,具有简单的语音处理功能,不需要外挂语音处理芯片,因此采用SPCE061A作为主控芯片。
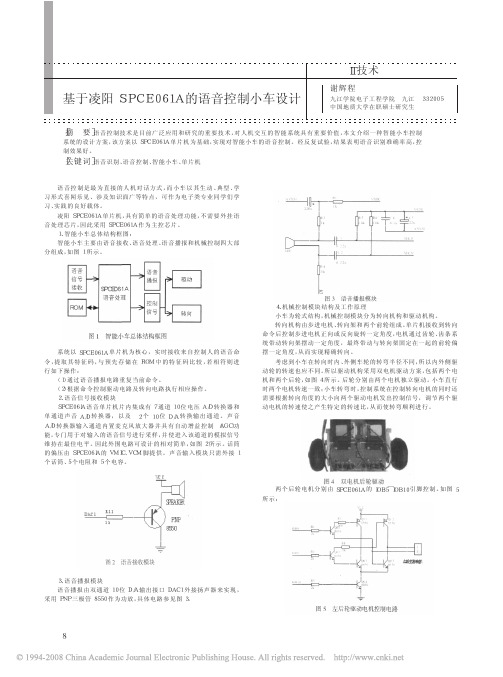
1、智能小车总体结构框图:智能小车主要由语音接收、语音处理、语音播报和机械控制四大部分组成,如图1所示。
图1智能小车总体结构框图系统以SPCE061A单片机为核心,实时接收来自控制人的语音命令,提取其特征码,与预先存储在ROM中的特征码比较,若相符则进行如下操作:(1)通过语音播报电路重复当前命令。
(2)根据命令控制驱动电路及转向电路执行相应操作。
2、语音信号接收模块SPCE06lA语音单片机片内集成有7通道10位电压A/D转换器和单通道声音A/D转换器,以及2个10位D/A转换输出通道。
声音A/D转换器输入通道内置麦克风放大器并具有自动增益控制(AGC)功能,专门用于对输入的语音信号进行采样,并使进入该通道的模拟信号维持在最佳电平。
因此外围电路可设计的相对简单,如图2所示。
话筒的偏压由SPCE06lA的VMIC、VCM脚提供。
声音输入模块只需外接1个话筒、5个电阻和5个电容。
图2语音接收模块3、语音播报模块语音播报由双通道10位D/A输出接口DAC1外接扬声器来实现,采用PNP三极管8550作为功放,具体电路参见图3。
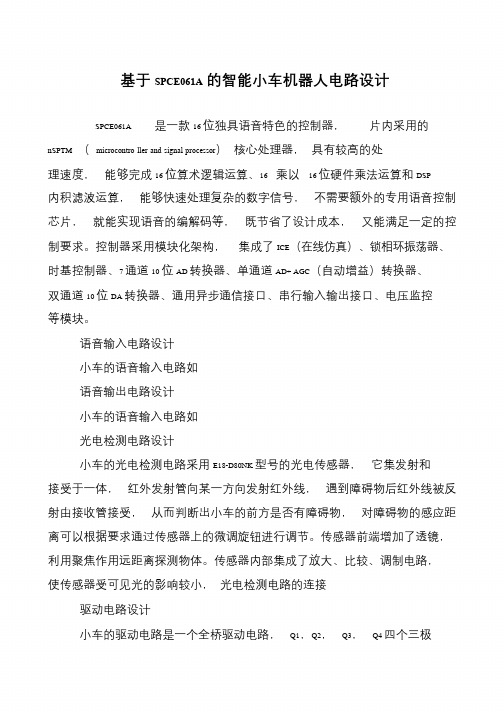
图3语音播报模块4、机械控制模块结构及工作原理小车为轮式结构,机械控制模块分为转向机构和驱动机构。
转向机构由步进电机、转向架和两个前轮组成。
单片机接收到转向命令后控制步进电机正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度,从而实现精确转向。
考虑到小车在转向时内、外侧车轮的转弯半径不同,所以内外侧驱动轮的转速也应不同。
所以驱动机构采用双电机驱动方案,包括两个电机和两个后轮,如图4所示。

1、引言语音处理技术是一门新兴的技术,它不仅包括语音的录制和播放,还涉及语音的压缩编码和解码,语音的识别等各种处理技术。
以往做这方面的设计,一般有两个途径:一种方案是单片机扩展设计,另一种就是借助于专门的语音处理芯片。
普通的单片机往往不能实现这么复杂的过程和算法,即使勉强实现也要加很多的外围器件。
专门的语音处理芯片也比较多,如ISD 系列、PM50 系列等,但是专门的语音处理芯片功能比较单一,想在语音之外的其他方面应用基本是不可能的。
SPCE061A 是一款 16 位μ'nSP结构的微控制器。
该芯片带有硬件乘法器,能够实现乘法运算、内积运算等复杂的运算。
它不仅运算能力强,而且处理速度快,单周期最高可以达到 49MHz。
SPCE061A 内嵌 32K 字的 FLASH 程序存储器以及 2K 的SRAM。
同时该 SOC 芯片具有 ADC 和DAC 功能,其 MIC_ADC 通道带有AGC自动增益环节,能够很轻松的将语音信号采集到芯片内部,两路 10 位的电流输出型DAC,只要外接一个功放就可以完成声音的播放。
以上介绍的这些硬件资源使得该SPCE061A 能够单芯片实现语音处理功能。
借助于 SPCE061A 的语音特色,“基于单片机技术的语音控制小车设计”实现了对小车前进、后退、左转、右转、停车等语音控制功能.2、语音控制小车设计要求2.1 功能要求:1.可以通过简单的 I/O 操作实现小车的前进、后退、左转、右转功能;2.配合 SPCE061A 的语音特色,利用系统的语音播放和语音识别资源,实现语音控制的功能;3.可以在行走过程中声控改变小车运动状态;4.在超出语音控制范围时能够自动停车。
2.2 参数说明车体:双电机两轮驱动供电:电池(四节 AA:1.2V×4 或 1.5V×4)工作电压:DC 4V~6V工作电流:运动时约 200mA3.SPCE061A特性简介SPCE061A是一款性价比很高的十六位单片机,使用它可以非常方便灵活的实现语音的录放,该芯片拥有8路10位精度的 ADC,其中一路为音频转换通道,并且内置有自动增益电路。
基于SPCE061A的智能小车机器人电路设计
SPCE061A 是一款16 位独具语音特色的控制器,片内采用的nSPTM (microcontro ller and signal processor)核心处理器,具有较高的处理速度,能够完成16 位算术逻辑运算、16 乘以16 位硬件乘法运算和DSP 内积滤波运算,能够快速处理复杂的数字信号,不需要额外的专用语音控制
芯片,就能实现语音的编解码等,既节省了设计成本,又能满足一定的控
制要求。
控制器采用模块化架构,集成了ICE(在线仿真)、锁相环振荡器、
时基控制器、7 通道10 位AD 转换器、单通道AD+ AGC(自动增益)转换器、双通道10 位DA 转换器、通用异步通信接口、串行输入输出接口、电压监控
等模块。
语音输入电路设计
小车的语音输入电路如
语音输出电路设计
小车的语音输入电路如
光电检测电路设计
小车的光电检测电路采用E18-D80NK 型号的光电传感器,它集发射和
接受于一体,红外发射管向某一方向发射红外线,遇到障碍物后红外线被反
射由接收管接受,从而判断出小车的前方是否有障碍物,对障碍物的感应距
离可以根据要求通过传感器上的微调旋钮进行调节。
传感器前端增加了透镜,
利用聚焦作用远距离探测物体。
传感器内部集成了放大、比较、调制电路,
使传感器受可见光的影响较小,光电检测电路的连接
驱动电路设计
小车的驱动电路是一个全桥驱动电路,Q1,Q2,Q3,Q4 四个三极。

第六届IT文化节系列活动之----嵌入式系统设计基于凌阳SPCE061A 语音控制智能小车一、前言:凌阳公司开发的SPCE061A 芯片为带音频信号处理功能的16 位单片机。
所以根据该芯片的特色,适合开发具有语音互动功能的儿童智能玩具。
目前在智能玩具市场上,都是日本做的比较先进,例如日本推出的一个比较成功的机器狗,很可爱,很受孩子们的欢迎。
根据凌阳SPCE061A 芯片的强大功能,我们中国也可以开发出先进的智能玩具。
本方案就是利用语音识别技术来控制小车的运动。
利用语音可以控制小车的前进、后退、左转、右转和按预设轨迹行走的功能。
在语音操作的时候,都会有相应的语音提示,很人性化。
另外如果再加上红外光电对管对小车轮子进行速度测量,并用数码管显示出来。
也可以由红外光电光电管构成循迹模块和小车结合。
由此构成智能小车控制系统。
二、小车平台的搭建:(1)小车底板采用加厚12*18cm 万用板:通过在该万用板的相应位置钻孔来固定轮子及其他附件。
图一 万用板(2)前轮采用万向轮:图二 万向轮(3)后轮则用两个大扭矩减速电机:转弯原理:就是控制两个电机的转速的不同,即一个慢一个快便可实现转弯。
或者一个电机停转,只让其中一个电机转,可实现快速转弯。
两个电机同时转便可实现前进、后退。
图三 减速电机(3)电机驱动采用由L298集成电机驱动芯片组成的电路图四 L298芯片电机驱动电路或者是由三极管组成的桥式电路:图四 桥式电机驱动电路该电路可以驱动两个电机,并且每个通道有两个输入端,通过SPCE061A 的IO 管脚控制每个通道两个输入端的高低电位便可实现控制电机的正反转,通过PWM 信号还可以对电机进行调速,其中PWM 信号可由SPCE061A 的定时器设定来产生。
该电路板焊好后,如下所示:图五 桥式驱动电路板实际效果图 (4)整体效果图:图六 整体效果图扩展功能:(由于时间等问题,改部分还未完善)(1)红外光电管1(检测速度用):图七 红外光电管1该光电管驱动电路比较简单,如下图所示:图八 红外光电管1 驱动电路该红外管封装了一个发射管和一个接收管,只要在小车后轮上加一片挡板,而该红外光电管置于挡板相应位置让挡板刚好可以遮住光电管的中间间隙。
基于凌阳单片机的语音控制小车摘要声音控制功能是凌阳单片机的一个特色,通过这个功能更能够实现普通单片机无法实现的一些任务,本设计是通过凌阳单片机的语音处理功能实现语音控制小车的前进和方向,并让小车作出相应的回答,设计系统主要包括三大部分,其中两部分为硬件部分:凌阳单片机的小系统,包括I/O端口、DAC转换、ADC转换等等;另一部分是控制板部分,用于控制电机的旋转方向;第三部分为软件部分。
关键词:语音控制小车;声控;小车;SPCE061ABased on Ling Y ang monolithic integrated circuit's voice control carAbstractThe phonic control function is a Ling Y ang monolithic integrated circuit's characteristic, suffices some duties which through this function realizes the ordinary monolithic integrated circuit to be unable to realize, this design is realizes the voice control car's advance and the direction through the Ling Y ang monolithic integrated circuit's pronunciation processing function, and lets the car make the corresponding reply, the design system mainly includes three major parts, two parts for hardware part: The Ling Y ang monolithic integrated circuit's small system, including the I/O port, DAC transforms, ADC transformation and so on; Another part is the control panel part, uses in controlling electrical machinery's hand of rotation; The third part is the software part.Key word: V oice control car;V oice control;Car;SPC061A目录1 引言 (1)2方案论证 (2)2.1方案论证 (2)3语音控制小车设计要求 (3)3.1功能要求 (3)3.2备注 (3)3.2.1 参数说明 (3)3.2.2 注意事项 (3)3.3扩展功能 (3)4 凌阳芯片的介绍 (4)4.1SPCE061A芯片的特点及其功能 (4)4.2SPCE061A芯片内核结构 (5)5硬件系统设计 (6)5.1系统的总体方案 (6)5.1.1 16位微处理器芯片的外围结构 (6)5.261板的各部分硬件模块 (7)5.2.1 麦克录音输入及AGC电路 (7)5.2.2 数摸转换电路 (7)5.2.3 按键,LED和复位电路 (8)5.2.4 电源电路 (8)5.2.5 下载线接口电路和在线调制电路 (9)5.2.6 16位微处理器的连接电路 (9)5.3车体介绍 (10)5.4小车的行走原理 (10)5.5控制电路原理板 (11)5.6控制电路原理 (12)5.6.1 后轮电机驱动电路原理 (12)5.6.2 前轮电机驱动电路原理 (13)6 系统软件设计 (14)6.1系统主程序设计流程图 (14)6.2语音识别 (15)7硬件制作及系统调试 (17)7.1硬件制作 (17)7.2调试和下载程序 (17)7.3调试小车 (17)7.4初试小车 (17)7.5重新调试 (18)结束语 (19)致谢 (20)参考文献 (21)附录附录1 电路原理图(61板)附录2 电路原理图(控制板)附录3 元件清单附录4 PCB图附录5 小车图片附录6 主控制源程序基于凌阳单片机的语音控制小车1 引言语音控制技术是一门新兴技术,可以通过语音直接控制电子产品,摆脱了遥控器的束缚。
红外传感与音控结合的避障小车设计摘要:文章基于凌阳spce061a 16位单片机设计了红外传感与音控结合的避障小车。
利用l298n驱动电路驱动两个直流电动机;利用红外探测电路检测行进道路的障碍物;利用单片机的语音识别模块实现小车的语音控制。
文章给出了小车的硬件和软件设计。
关键词:语音识别;红外传感;障碍物探测1 引言随着社会的发展与科学技术的进步,人们对自动化的要求越来越高,在此背景下工业机器人因运而生。
现在智能化的产品渗透在各个领域而且许多产品都已成为了大众消费品,因此研发智能汽车具有广阔的市场前景,无人驾驶的智能汽车是未来汽车发展的一个趋势。
因此本文基于凌阳spce061a单片机利用红外传感与音制相结合实现小车的避障,可为人们设计完善的智能车提供新的想法。
2 智能车结构介绍设计使用的小车是履带式小车,有承载能力强、抓地力强、行走平稳等优点。
小车的两个后轮分别由两个直流电动机控制,通过控制电机的正反转就可实现小车的前进与转弯,可用4节5号电池为其供电。
3 spce061a的主要性能特点spce061a是凌阳科技公司推出的一款16位单片机。
spce061a在2.6v~3.6v工作电压范围内的工作速度范围为0.32mhz~49.152mhz。
2k字sram和32k字闪存rom,32位可编程的多功能i/o端口;两个16位定时器/计数器;低电压复位/监测功能;8通道10位模-数转换输入功能并具有内置自动增益控制功能的麦克风输入方式;双通道10位dac方式的音频输出功能。
该单片机最大的特点就是具有语音识别模块,它可以方便高效地进行语音识别。
4 系统总体设计基于小车和单片机的特点,本文设计出了红外检测障碍物和语音控制相结合的智能小车。
以spce061a为核心处理器;选择l298n芯片驱动直流电机;并用红外线传感器探测障碍物,利用接收电路将检测到障碍物的信号反馈给单片机;单片机经过处理后发出语音提示(“前方有障碍物,请指示”),然后通过语音控制小车的行驶方向(如“左转”等)。
基于单片机的语音控制小车设计摘要随着电子工业的发展,具有语音控制功能的小车越来越受到人们的青睐,在人们的日常消费生活中起着不可忽视的作用。
目前,声控技术已在很多领域得到使用。
本文对语音控制功能的小车概况做了阐述。
在硬件设计方面,本论文以凌阳公司的SPCE061A单片机为控制核心,以语音小车控制电路板为辅,设计小车的动作。
完成了电源电路、复位电路、键盘电路、音频输入电路,音频输出电路和无线控制电路等硬件功能模块的设计。
在软件方面,利用C语言进行编程,进行语音的“训练”和“识别”。
设计出具有如下功能的语音声控小车:能够根据录制的语音命令来控制小车的前进,后退,左转,右转的功能。
测试表明,在环境背景噪音不太大,控制者的发音清晰的前提下,语音控制小车的语音识别系统能对特定的语音指令做出智能反应,做出预想中的有限的动作。
论文首先对系统的方案进行论证,然后对各单元的软件、硬件工作原理进行了阐述,并介绍了系统的主要组成部分情况。
关键词:SPCE061A,语音识别,全桥驱动,小车IVoice control car design based on single chipmicrocomputerAbstractWith the development of the electronics industry, the voice - the control car become more and more popular to people. And it plays an important role in people 's daily life. At present, the voice - activated technology has had 2 in many fields, For example, voice - activated phone. Only if you called out the names you want and it automatically called to the telephone.This article gives a detail to the voice-activated car. In hardware design, the paper use Sunplus SPCE061A as the control of core. On the software, we use C language programming for voice "training"and"recognition". .Completedthepowercircuit,resetcircuit,keyboardcircuitry,audioinput circuits,audiooutputcircuitandcontrolcircuitofwirelesshardwaresuchasthedesignoffunctionmodule s.It has the following features: According to recorded the voice command to control the car to start, stop,turn right , and turn left. Tests have shown that background noise in the environment is not too big, the controller under the premise of clear pronunciation, voice control car voice recognition system can make intelligent response to a particular voice commands, limited, as expected.First of all, cca shut confirm the system of the program, and then describe the unit 's software and hardware as well as introduce the main components of the situation.Key words:S PCE061A,Speech Recognition,Full-bridge ,driver,TrolleyII目录摘要 (I)Abstract (II)第1章绪论.......................................................................................................................... - 1 -1.1 选题的目的和意义.................................................................................................... - 1 -1.1.1选题目的............................................................................................................. - 1 -1.1.2.选题意义............................................................................................................. - 1 -1.2 语音小车的发展及现状............................................................................................ - 1 -1.3 课题的目的任务和要求............................................................................................ - 2 - 第2章语音小车的方案论证.................................................................................................. - 3 -2.1 语音控制方案............................................................................................................ - 3 -2.2 方案论证.................................................................................................................... - 4 -2.2.1 采用DSP+FPGA方案 ...................................................................................... - 4 -2.2.2采用MCS-51方案 ............................................................................................. - 4 -2.2.3 采用凌阳61方案.............................................................................................. - 5 -2.3 系统控制方案............................................................................................................ - 6 - 第3章系统硬件设计.............................................................................................................. - 9 -3.1 系统硬件总体设计.................................................................................................... - 9 -3.2 系统各单元设计...................................................................................................... - 10 -3.2.1 控制单元设计.............................................................................................. - 10 -3.2.2 动力单元设计.............................................................................................. - 15 -3.2.3 音频单元设计.............................................................................................. - 16 -3.2.4 小车单元设计.............................................................................................. - 19 -3.3 系统总体电路图...................................................................................................... - 26 - 第4章系统软件设计............................................................................................................ - 27 -4.1系统总体程序设计................................................................................................. - 27 -4.2 系统各分支设计..................................................................................................... - 28 -4.2.1训练子程序....................................................................................................... - 28 -4.2.2语音识别子程序............................................................................................... - 29 -I I I4.2.3动作子程序....................................................................................................... - 31 -4.2.4中断子程序....................................................................................................... - 34 - 第5章系统调试.................................................................................................................... - 37 -5.1 硬件调试.................................................................................................................. - 37 -5.2 软件调试.................................................................................................................. - 38 -5.3 系统联调.................................................................................................................. - 39 - 结论........................................................................................................................................ - 41 - 参考文献.................................................................................................................................. - 43 - 致谢........................................................................................................................................ - 45 - 附录........................................................................................................................................ - 47 -I V第1章绪论1.1 选题的目的和意义1.1.1选题目的通过设计一个用单片机控制的语音小车来熟悉模块化编程方法,掌握C语言汇编语言的程序设计和调试方法,并理解单片机的原理、结构、指令;运行模式及应用方法。