机器人等级考试-9.智能小车结构安装
- 格式:pptx
- 大小:15.41 MB
- 文档页数:36

4自学成才智能小车安装步骤文档
一、安装前的准备
1.准备必要的软硬件
自学成才智能小车安装前需要准备一个安装软件包,其中包括安装程序和相关驱动程序,以及两块智能小车板和一个智能小车底盘。
同时,用户还需要准备一台电脑,以方便进行安装。
2.断开网络
在安装智能小车之前,需要先断开网络,避免因网络不稳定而导致安装中断。
3.安装前检查
安装前还需要检查智能小车板以及底盘,是否有断路、损坏等情况,确保安装时无任何问题。
二、智能小车安装
1.安装驱动程序
首先,用户需要打开安装软件包,选择驱动程序,点击安装,完成驱动程序安装。
2.安装智能小车程序
接着,用户需要选择智能小车程序,点击安装,完成智能小车程序的安装。
3.连接智能小车底盘
再接着,用户需要将智能小车板和智能小车底盘进行连接,然后将智能小车板放置到智能小车底盘上,并固定。
4.配置安装
最后,运行安装程序,进行配置安装,安装完成后即可运行自学成才智能小车程序。
三、安装完成
经过上述步骤,自学成才智能小车的安装便完成了。
安装完成后,用户需要通过软件进行设置,对智能小车进行编程,以让智能小车可以实现智能化移动。

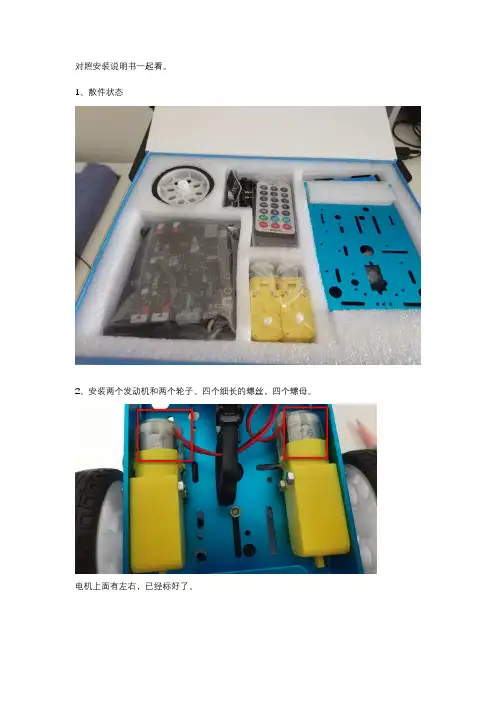
对照安装说明书一起看。
1、散件状态
2、安装两个发动机和两个轮子。
四个细长的螺丝,四个螺母。
电机上面有左右,已经标好了。
图安装完电机和轮子3、安装寻迹传感器和万向轮,要两个大的螺丝,白色的:
图安装完成寻迹传感器和万向轮
4、把车子翻转过来:
找到4个黄色的长的铜螺柱。
图接好四个铜柱5、安装超声波传感器:要两个白色螺丝。
6、安装电池盒:
有根RJ25线,现在可以分别接到寻迹传感器和超声波传感器上去,接进去时会有“哒”的一声响。
如下图:
接好一端,穿过方孔。
图电机的两个线穿过圆孔接过来。
按上图。
记得安装电池!!!!
8、安装主板,要4个螺丝:
安装前对主板通电测试:
电源开关和电池接口。
安装主板前,把电池的插接口接到主板上,打开拨动开关,测试主板上的灯是否亮了;
如果没有亮,转动下电池。
亮了之后,关闭电源开关,小心拔下电池盒接口(拔不下就算了)。
9、安装蓝牙模块:
装在“下载接口”旁边,5个孔的,往数字“1”的方向安装。
10、接线:
电机接口,左电机,右电机:
电池供电线接法:
寻迹模块接线,黑线,接端口2:
超声波模块,黑线,接端口3:
安装保护板:
羊角螺丝接法:。
青少年机器人等级考试(一级)(含答案)您的姓名: [填空题] *_________________________________1.下列哪个不是机器人?[单选题]A.aB.b(正确答案)C.cD.d2.电源相当于机器人的() [单选题]A.手臂B.大脑C.心脏(正确答案)D.皮肤3.当代机器人家族中,用于生产制造的机器人为? [单选题]A.工业机器人(正确答案)B.军用机器人C.服务机器人D.特种机器人4.机器人结构中,起着支撑作用的部件是? [单选题]A.机座(正确答案)B.电机C.腰部D.手臂5.如图,该零件应该配合下列那种工具使用?[单选题]A.a(正确答案)B.bC.cD.d6.如图,从地面到T点那条路走起来最省力?[单选题]A.aB.bC.cD.d(正确答案)7.盘山公路是利用我们所学的哪种简单机械来省力的? [单选题]A.滑轮B.杠杆C.斜面(正确答案)D.轮子8.下列哪一个是机器人?[单选题]A.aB.b(正确答案)C.cD.d9.下列物品常用来给机器人提供动力的是? [单选题]A.水B.机器人的机械手臂C.通电的马达(正确答案)D.开关10.以下哪个是机器人必须具备的? [单选题]A.动力来源(正确答案)B.机械手臂C.金属外壳D.人的形象11.如图,十字花螺丝刀一般配合下列哪种物品使用?[单选题]A.aB.bC.cD.d(正确答案)12.如图,使用镊子的时候作为支点的是? [单选题]A.a点(正确答案)B.b点C.c点D.d点13.如图,盘山公路采用了下列哪种结构? [单选题]A.杠杆B.斜面(正确答案)C.滑轮D.螺旋14.如图,下列是费力杠杆的是?[单选题]A.a(正确答案)B.bC.cD.d15.如图,想要从地面爬到山顶,走哪条路更省力?[单选题]A.aB.bC.cD.d(正确答案)16.如图,哪个滑轮是动滑轮?[单选题]A.aB.bC.cD.d(正确答案)17.以下哪个机械结构不能用来省力? [单选题]A.动滑轮B.定滑轮(正确答案)C.斜面D.省力杠杆18.如图,关于该滑轮组说法正确的是? [单选题]A.有两个动滑轮B.有两个定滑轮(正确答案)C.左边是动滑轮,右边是定滑轮D.左边是定滑轮,右边是动滑轮19.如图,模型搅拌器采用了哪种机械结构来加速?[单选题]A.杠杆B.斜面C.滑轮D.齿轮(正确答案)20.如图,哪个剪刀利用了省力杠杆的原理?[单选题]A.aB.b(正确答案)C.cD.d21.如图,地面上放是个物体,最稳定的是?[单选题]A.aB.b(正确答案)C.cD.d22.为了增加物体的稳定的做法正确的是? [单选题]A.升高物体的重心B.降低物体的重心(正确答案)C.把物体整体做成上大下小D.减少物体与地面的接触面积23.关于小朋友荡秋千,下列说法正确的是? [单选题]A.荡到最低点时速度最快,动能最大(正确答案)B.荡到最低点时速度最快,势能最大C.荡到最高点时速度最快,动能最大D.荡到最高点时速度最快,势能嘴大24.下列滑轮组能省力的有几个?[单选题]A.1个B.2个C.3个(正确答案)D.4个25.如图,轮轴相当于变形的杠杆,则支点是? [单选题]A.aB.b(正确答案)C.cD.d26.图中哪个是冠齿轮?[单选题]A.aB.bC.c(正确答案)D.d27.如图说法错误的是? [单选题]A.此机械结构为蜗轮蜗杆B.该机械结构中一般蜗轮为从动件C.该机械结构中一般蜗杆为主动件D.蜗轮可以轻易带动蜗杆(正确答案)28.如图,圈内的装置的作用是? [单选题]A.省力B.省距离C.改变力的方向(正确答案)D.美观29.如图,转笔刀手摇部分相当于? [单选题]A.齿轮B.定滑轮C.动滑轮D.轮轴(正确答案)30.起重机利用下列哪个装置来改变力的方向? [单选题]A.动滑轮B.定滑轮(正确答案)C.平齿轮D.冠齿轮31.下列说法中正确的是? [单选题]A.斜面不能省力B.滑轮组不能省力C.定滑轮不能省力(正确答案)D.动滑轮不能省力32.关于齿轮说法正确的是? [单选题]A.直接连接电机的齿轮是主动轮(正确答案)B.大齿轮带动小齿轮起减速左右C.小齿轮带动大齿轮起加速作用D.平行啮合的两齿轮旋转方向相同。

2024年9月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1.使用 ESP32 for Arduino SPI 类库,下列选项中,具有设置时钟模式功能的成员函数是?()。
A. SPI.setMode()B. SPI.setBitOrder()C. SPI.setDataMode()D. SPI.setCLock()标准答案:C。
2.题HTML文档由标签和文本内容组成,下列选项中,用于标记网页头部的标签是?()。
A. <title>B. <head>C. <body>D. <p>标准答案:B。
3.题ESP32 for Arduino 提供的 WiFi类库的成员函数中,用于设定ESP32主控板为AP模式的成员函数是?()。
A. WiFi.scanNetWorks()B. WiFi.softAP()C. WiFi.begin()D. WiFi.SSID()标准答案:B。
4.下列选项中,可获取本机电脑止的命令是?()。
A. dirB. msconfigC. pingD. ipconfig标准答案:D。
5.下图是三相反应式步进电机连续节拍工作示意图,图示所对应的工作方式为?()。
A. 三相单三拍B. 三相单六拍C. 三相双三拍D. 三相双六拍标准答案:C。
6.关于 ESP32 for Arduino SPI类库成员函数begin()的功能,下列描述正确的是?()。
A. 启动SPI通信事务B. 启动SPI数据传送C. 设置SPI的时钟模式D. 按照默认参数初始化SPI接口标准答案:D。
7.题PID控制器是比例-积分-微分控制器的简称,下列选项中,可消除稳态误差的控制器有?()。
A. P控制B. 1控制C. D控制D. ID控制标准答案:B。
8.关于 ESP32 for Arduino I2C类库成员函数requestFrom()的功能,下列描述正确的是?()。
在科技制作中,需要执行器给制作的装置提供动力,常用的执行器有直流电机、舵机、步进电机(步进是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为“步距角”)一步一步运行的, 其特点是没有积累误差)等。
直流电机是自常见的执行器之一。
在红外遥控小风扇章节中通过晶体三极管控制电路实现了电机的启停控制和速度控制,但没有实现转向控制。
在很多自动控制场合都需要控制电机的正反转。
那具体应该如何控制电机的呢?H桥电路H桥电路名称的由来是因为控制电路的形状像英文字母H而得名。
控制电机正反转的H桥开关电路如右图所示:M HM C B当开关A与D闭合时,电流如右图指示方向流过电机。
M C B当开关B与C闭合时,电流如右图指示方向流过电机。
同侧的开关A、C或者B、D不能同时打开,否则将导致短路。
将上面的开关换成晶体管,就构成了现在常见的H桥控制电路,采用NPN和PNP 晶体管配对。
如右图所示,晶体管Q1、Q2 和 Q3、Q4的基极分别相连。
当左侧输入低电平,右侧输入高电平时,晶体管Q1和Q4导通,Q2和Q3断开,电流流动方向如右图所示。
当左侧输入高电平,右侧输入低电平时,电流流动方向和图示相反。
直流电机驱动和控制模块除了用晶体管自行组装H桥控制电路,还可以直接选用专用的电机驱动控制IC。
常见的驱动芯片如下图:L293D L298N TB6612 上面三种芯片都包含了两组H桥式电路,可以驱动并控制两个电机的正反转。
L298N和TB6612还需要有外围电路,所以使用时一般都采用成品的电机驱动模块。
使用TB6612电机驱动芯片,MA电机速度控制口:D5MA电机方向控制口:D7MB电机速度控制口:D6MB电机方向控制口:D8小车姿态图示引脚参数前进Motor_run(1,30)Motor_run(2,30)后退Motor_run(1,-30)Motor_run(2,-30)左转Motor_run(1,30)Motor_run(2,0)通过控制MA、MB来实现小车运动方向的控制:小车姿态图示引脚参数右转Motor_run(1,0)Motor_run(2,30)原地左转Motor_run(1,30)Motor_run(2,-30)原地右转Motor_run(1,-30)Motor_run(2,30)速度-30表示马达反着转项目一:让智能小车动起来所需器件:Ø已搭建好的智能小车一辆堵转:由于减速电机受到阻力,当输入的PWM值产生的动力小于阻力时,电机不能转动,此时,电机会发出嗡嗡的声音。
2024年3月青少年机器人技术等级考试理论综合试卷一级真题及答案分数:100 题数:45一、单选题(共30题,共60分)。
1.下列机构中不可能省力的是()。
A.动滑轮B.定滑轮C.斜面D.杠杆标准答案:B。
2.如图,下列哪个建筑应用了三角形结构()。
A.aB.bC.cD.d标准答案:A。
3.如图,盘山公路应用了什么来省力()。
A.杠杆B.斜面C.动滑轮D.定滑轮标准答案:B。
4.如图,下列哪个是机器人()。
A.aB.bC.cD.d标准答案:C。
5.如图,下列哪个框架结构最稳定()。
A.aB.bC.cD.d标准答案:D。
6.如图,从地面爬到山顶走哪条路最省力()。
A.aB.bC.cD.d标准答案:A。
7.关于履带车,下列说法正确的是()。
A.使用履带会更防滑B.使用履带更容易陷入泥沙中C.使用履带主要是为了美观D.履带的长度无法调节标准答案:A。
8.如图,下列哪个工具是一字型螺丝刀()。
A.aB.bC.cD.d标准答案:D。
9.如图,机器人的电源相当于人类的()。
A.aB.bC.cD.d标准答案:D。
10.如图,使用以下哪个工具相当于使用费力杠杆()。
B.bC.cD.d标准答案:A。
11.如图,使用转笔刀把手相当于使用了()。
A.滑轮B.齿轮C.轮轴D.斜面标准答案:C。
12.关于轮轴,下列说法正确的是()。
A.轮轴只能省力B.轮轴只能费力C.轮轴是杠杆的变形D.轮轴既不能省力也不能费力标准答案:C。
13.如图,下列选项中最省力的滑轮组是()。
A.aB.bC.c标准答案:D。
14.下列齿轮组起加速作用的是()。
A.主动轮12齿,从动轮6齿。
B.主动轮6齿,从动轮18齿。
C.主动轮18齿,从动轮18齿。
D.主动轮6齿,从动轮6齿。
标准答案:A。
15.当大齿轮带动小齿轮转动时,下列说法正确的是()。
A.大齿轮转速比小齿轮快B.大齿轮转速比小齿轮慢C.大齿轮是从动轮D.该齿轮组传动比为1:1标准答案:B。
2023年9月青少年机器人技术等级考试理论综合试卷二级真题(含答案)分数:100 题数:45一、单选题(共30题,共60分)。
1.如图,关于该机构说法正确的是()。
A.b是主动件B.这是棘轮机构C.这是槽轮机构D.这是连杆机构标准答案:A。
2.如图一辆小汽车停在陡坡上,下列哪个不是它受到的力()。
A.重力B.摩擦力C.弹力D.支持力标准答案:C。
3.智能机器人属于第几代机器人()。
A.第一代B.第二代C.第三代D.第四代标准答案:C。
4.下图中哪个是曲柄摇杆机构()。
A.aB.bC.cD.d标准答案:A。
5.如图曲柄滑块机构中哪个部分在既定的轨道上滑动()。
A.aB.bC.cD.d标准答案:C。
6.如图,鞋底有花纹是为了()。
A.更加美观B.减小摩擦C.增加摩擦防止打滑D.走路轻便标准答案:C。
7.题“公输子削木为鹊”的典故记载的是()。
A.水中机器人B.空中机器人C.陆地机器人D.水陆两栖机器人标准答案:B。
8.如图关于该机构说法正确的是()。
A.这是外啮合棘轮B.这是内啮合棘轮C.这是凸轮机构D.这是不完全齿轮机构标准答案:B。
9.如图下列哪个是单动式棘轮机构()。
A.aB.bC.cD.d标准答案:B。
10.如图,该机构中棘轮是指()。
A.aB.bC.cD.d标准答案:D。
11.如图,下列哪个凸轮机构采用了平底型从动件()。
A.aB.bC.cD.d标准答案:C。
12.如图关于反向双曲柄说法正确的是()。
A.a来回摇摆。
B.b来回摇摆。
C.a和b做回转运动,方向相反。
D.c做回转运动。
标准答案:C。
13.下图中的凸轮机构使用了摆动型从动件的是()。
A.aB.bC.cD.d标准答案:C。
14.自行车链属于哪种传动方式的一部分()。
A.齿轮传动B.链传动C.皮带平行传动D.皮带交叉传动标准答案:B。
15.如图,挖掘机的机械臂采用了哪种机构()。
A.凸轮机构B.棘轮机构C.滑轮机构D.连杆机构标准答案:D。
智能小车装配教程准备工作:备好螺丝刀、十字套筒、配套螺丝、相关支架。
组装过程:我们先从前支架开始。
组装前对照我们的发货清单检查下物品是否齐全。
检查好了我们就开始组装。
1.拿出黑色转向杯、轴承、M4X20平头螺丝,如下图:把两个轴承放进转向杯里,大小轴承里外各放一个,使轴承完全卡进转向杯里。
2.然后将轮子跟这个转向杯用M4X20螺丝、M4自锁螺母装在一起。
如下图:自锁螺母这头用十字套筒套住,另外一边用螺丝刀转动M4x20螺丝,不要锁太紧要保证轮子能够自如转动。
用这种方法装好两个轮子放在一旁。
3.舵机转向结构安装,拿出舵机支架、舵机用螺丝固定在一起:将一字臂支架卡在舵机的输出轴上并锁上M3X6螺丝,注意一字臂的方向:4.将上面这部分与大底板用M3X22铜柱、M3X8螺丝组装在一起。
如下图:5.拿出长支架装在前面装好的模型上。
如下图:(组装过程中同样也是用套筒套住螺母,螺丝头用螺丝刀拧。
注意自锁螺母不要锁到底,保证长条支架能够自如转动)6.将前面装好的轮子安放在上面模型中,用M2X35螺丝跟M2自锁螺母固定如下图:这里需要用所给的内六角扳手拧M2X35螺丝,最底下同样用十字套筒套住自锁螺母,拧到合适的位置。
另外一边轮子用同样的方式安装好。
7.将转向杯的转向臂跟长条支架固定在一起。
如下图:同样用套筒套住自锁螺母,螺丝头用螺丝刀拧。
拧到合适位置保证接触面转动灵活。
前支架装好后如下图:下面我们来看看后支架的安装过程:1.拿出全部后支架:将其中一个盖板用M3X8螺丝将M3X25铜柱、M3X30铜柱锁住。
2.拿出540电机和两个侧板如下图组装在一起:注意将侧板跟电机相应的安装孔对准:3.将另一块盖板卡上去并锁上螺丝:上面装好之后在侧板上轴承孔上放上5X11X4杯士轴承如下图:4.同时将车轴套进去,注意两边伸出来的长度保持相等。
5.依次将大齿轮跟轴套套进车轴里,保证大齿轮跟电机的输出齿轮啮合好,位置对准后用内六角扳手锁紧齿轮上的顶丝。