§5车辆的的蛇行运动稳定性
- 格式:doc
- 大小:315.00 KB
- 文档页数:15

车辆蛇形运动稳定性及运行振动分析车辆蛇形运动稳定性及运行振动分析1、车辆蛇形运动稳定性具有一定他面形状的轨道轮对即使沿着平直轨道运转,受到微小激扰后就会产生一种振幅保持现状或继续增大直道轮缘受到约束的特有运动,此时轮对向前滚动一面横向往摆动,一面又绕铅锤中心来回转动,其轮对中心轨迹呈波浪形,称蛇形运动,当激扰消失而剧烈的蛇形运动不能收敛时,则称蛇行失稳。
表面上轮对并未受到钢轨的纵向或横向位移激振,实际上这是一种自激振动,试论对对钢轨的相对运动产生了内部激振力,由这种激振力维持轮对相对运动,由机车牵引力提供的非振动能量由于轮轨间的自激机制转换为蛇形运动的能量。
当车辆运行到某速度时车辆系统中的阻尼无法消耗这种能量。
蛇形运动就失稳,该速度就称为蛇形失稳临界速度,轮轨间的蛇形运动是由等效斜率的踏面产生的,这种踏面避免轮对的轮缘始终贴靠在轨侧运动而采取的自动取中措施,正是这种取中的能力在一定条件下转化为失稳的动力。
在纯粘着滚动假设条件下,由锥形踏面轮对与钢轨间的几何关系可以推导出一个无约束自由轮对的蛇形运动频率W w及波长L w的公式,之后又推出了轴距为2L w的刚性二轴结构转向架的蛇形波长L t及蛇形频率W t的相关公式。
W w = 2πv/L w,L w =2πbr×1/λe2, W t =2πv/L t,影响蛇形运动因素很多,主要有以下几个,1轮对定位刚度,2轮对踏面等效斜率λe,3蠕滑系数,4转向架固定轴距,5中央悬挂装置。
2、车辆运行振动分析车辆垂直振动,城市轨道车辆的转向架通常采用二系悬挂,力求在有限的空间获得柔性,研究表明,车辆的两个自由度简化的垂直振动系统有两个自振频率,低频P1与总静挠度f st有关,而高频P2除与静挠度有关外,还与刚度及车体质量和簧上部分质量之比有关。
低频对应的振动型为车体与构架做相同振动,而高频振动对应车体与构架做反向振动,车体以低频振动为主,而构架则以高频振动为主干线客车及地铁轻轨车辆的两系垂直总挠度通常均在160mm以上。
蛇行运动稳定性论文:高速车辆运动稳定性的研究【中文摘要】由于高速列车具有运输能力大、消耗能量低、安全性能高、对环境污染较小以及在运行的过程中受到气候的影响小等众多优点,所以在国内外得到了很快的发展。
随着对我国既有线路的改造以及对高速铁路的兴建,高速铁路对我国的经济、生活的改变发挥着越来越大的作用。
对车辆系统的稳定性早在铁路运输事业发展初期就已经被发现,但是高速车辆运动稳定性之所以区别于以往普通车辆运动稳定性的原因就在于其在高速运行下特殊的动态环境。
高速车辆运动稳定性的研究从初期的线性模型或者是经过线性化处理的数学模型到现在考虑众多非线性因素的非线性模型,从初期的局部稳定性到现在的全局稳定性及混沌现象,其研究的深度越来越深,考虑的因素也越来越多,更加接近实际工程应用。
本文主要应用多体动力学方法,利用动力学仿真软件SIMPACK建立车辆系统多体动力学模型,研究车辆系统结构参数对车辆线性和非线性临界速度,以及对车辆系统的Hopf分岔类型的影响。
主要工作有:(1)应用多体动力学方法对车辆轮轨关系及结构参数进行分析,建立车辆动力学动力学仿真模型。
(2)详细介绍了车辆运动稳定性的相关理论,对车辆系统出现Hopf分岔原因进行了分析,并且对在仿真中线性和非线性临界速度的确定以及如何构建Hopf分岔图的方法进行了介绍。
(3)分析了几种不同踏面等效锥度和轨距下车辆系统运动稳定性、临界速度以及Hopf分岔类型的变化,得出随着等效锥度的降低车辆系统的临界速度跟着提高,车辆系统的线性和非线性临界速度差逐渐减小;随着轨距的增大车辆系统的临界速度跟着提高,轨距增大到一定值后系统出现超临界分岔,但是临界速度会因此而降低。
(4)建立抗蛇行减振器弹簧-阻尼串联的Maxwell假设模型,分析延迟时间和极限频率对车辆系统临界速度以及Hopf分岔类型的影响,得出了系统为超临界分岔的条件,为以后高速车辆运行及设计提供了参考。
(5)分析了一系、二系刚度、二系阻尼对车辆临界速度的影响,研究表明一系纵、横向刚度对车辆系统临界速度的影响是随着一系纵向和横向刚度增大而增大的,车辆系统的临界速度是先增大后减小,较大或者较小的刚度都不能获得最大的临界速度;二系纵横向刚度及阻尼也对车辆系统临界速度具有较大的影响。
蛇行运动对铁道车辆平稳性的影响探究作者:汤俊秀来源:《农村经济与科技》2018年第22期[摘要]随着我国铁路事业的快速发展,人们对乘坐铁路的舒适性、平稳性要求越来越高。
为了研究蛇行运动对铁道车辆运行平稳性的影响,本文根据蛇行运动的特点,首先仿真了转向架蛇行运动模态和车体固有振动模态,又从不同时域分析了不同速度车辆的平稳性,以及蛇行运动对车辆平稳性的影响的因素进行总结,旨在提高车辆运行的稳定性,提高铁道车辆的舒适度。
[关键词]蛇行运动;铁道车辆;平稳性;模态[中图分类号]U270.11 [文献标识码]A车体、构架、轮对以及它们之间的悬挂装置组成了铁道车辆的振动系统。
由自由振动论可得出车辆固有的振动模态,与外界的输入没有关系。
外部激扰频率与车辆固有频率接近时,就会影响乘坐的舒适性,影响乘客舒适性的原因有两个,一个是轨道不平,另一个就是轮轨之间的特殊性,即使车辆平稳行驶也会引起轮对的蛇行运动,轨道的不平对车辆稳定性的影响研究颇多,对于蛇行运动自激振动对铁路车辆的平稳性研究较少,本文就重点研究蛇行运动对车辆平稳性的影响。
1 蛇行运动的特性由于铁路车辆轮对有锥度的缘故,给它一个初始激扰,轮对就会围绕中心线一边发生横移一边摇头前进,如同蛇的运动,称之为蛇行运动。
即使车辆在平直的轨道上运行也会产生蛇行运动,这是因为它是由车辆内部非振动能量转化为持续的激振力。
轮对踏面有锥度是引起蛇行运动的条件。
自激振动源于车辆的牵引力,蛇行运动的有无是由车辆的停走决定的。
由车辆动力学系统可得出,当轮对确定以后自由轮对蛇行运动的影响主要是车辆运行速度,车辆的运行速度越大它的蛇行运动频率就越大。
对于刚性转向架来说它和自由轮对是一样的,都是随速度增大蛇行运动频率增大,在实际的车辆运行中这两种结构都是不存在的,实际的车辆运行中使用的是弹性定位转向架,它的蛇行运动频率介于自由轮对与刚性转向架之间,它也是随速度的增加蛇行频率不断增大。
由以上可看出,蛇行运动的最大特点就是跟车辆速度有关。
机车的蛇⾏运动
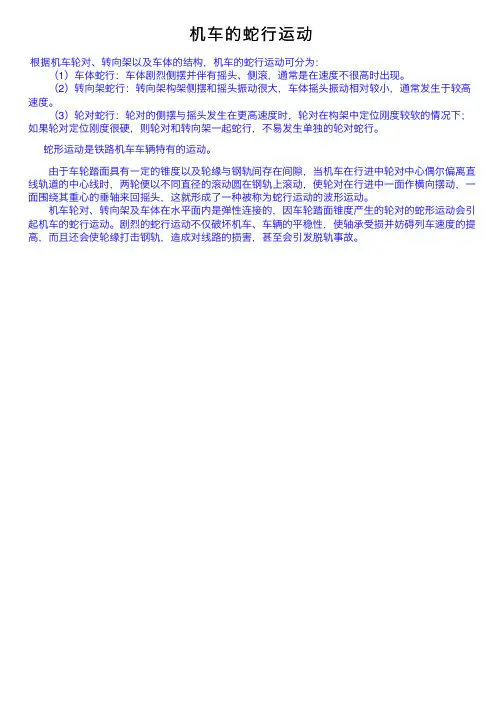
根据机车轮对、转向架以及车体的结构,机车的蛇⾏运动可分为:
(1)车体蛇⾏:车体剧烈侧摆并伴有摇头、侧滚,通常是在速度不很⾼时出现。
(2)转向架蛇⾏:转向架构架侧摆和摇头振动很⼤,车体摇头振动相对较⼩,通常发⽣于较⾼速度。
(3)轮对蛇⾏:轮对的侧摆与摇头发⽣在更⾼速度时,轮对在构架中定位刚度较软的情况下;如果轮对定位刚度很硬,则轮对和转向架⼀起蛇⾏,不易发⽣单独的轮对蛇⾏。
蛇形运动是铁路机车车辆特有的运动。
由于车轮踏⾯具有⼀定的锥度以及轮缘与钢轨间存在间隙,当机车在⾏进中轮对中⼼偶尔偏离直线轨道的中⼼线时,两轮便以不同直径的滚动圆在钢轨上滚动,使轮对在⾏进中⼀⾯作横向摆动,⼀⾯围绕其重⼼的垂轴来回摇头,这就形成了⼀种被称为蛇⾏运动的波形运动。
机车轮对、转向架及车体在⽔平⾯内是弹性连接的,因车轮踏⾯锥度产⽣的轮对的蛇形运动会引起机车的蛇⾏运动。
剧烈的蛇⾏运动不仅破坏机车、车辆的平稳性,使轴承受损并妨碍列车速度的提⾼,⽽且还会使轮缘打击钢轨,造成对线路的损害,甚⾄会引发脱轨事故。
车辆蛇形运动稳定性及运行振动分析1、车辆蛇形运动稳定性具有一定他面形状的轨道轮对即使沿着平直轨道运转,受到微小激扰后就会产生一种振幅保持现状或继续增大直道轮缘受到约束的特有运动,此时轮对向前滚动一面横向往摆动,一面又绕铅锤中心来回转动,其轮对中心轨迹呈波浪形,称蛇形运动,当激扰消失而剧烈的蛇形运动不能收敛时,则称蛇行失稳。
表面上轮对并未受到钢轨的纵向或横向位移激振,实际上这是一种自激振动,试论对对钢轨的相对运动产生了内部激振力,由这种激振力维持轮对相对运动,由机车牵引力提供的非振动能量由于轮轨间的自激机制转换为蛇形运动的能量。
当车辆运行到某速度时车辆系统中的阻尼无法消耗这种能量。
蛇形运动就失稳,该速度就称为蛇形失稳临界速度,轮轨间的蛇形运动是由等效斜率的踏面产生的,这种踏面避免轮对的轮缘始终贴靠在轨侧运动而采取的自动取中措施,正是这种取中的能力在一定条件下转化为失稳的动力。
在纯粘着滚动假设条件下,由锥形踏面轮对与钢轨间的几何关系可以推导出一个无约束自由轮对的蛇形运动频率W w及波长L w的公式,之后又推出了轴距为2L w的刚性二轴结构转向架的蛇形波长L t及蛇形频率W t的相关公式。
W w = 2πv/L w,L w =2πbr×1/λe2, W t =2πv/L t,影响蛇形运动因素很多,主要有以下几个,1轮对定位刚度,2轮对踏面等效斜率λe,3蠕滑系数,4转向架固定轴距,5中央悬挂装置。
2、车辆运行振动分析车辆垂直振动,城市轨道车辆的转向架通常采用二系悬挂,力求在有限的空间获得柔性,研究表明,车辆的两个自由度简化的垂直振动系统有两个自振频率,低频P1与总静挠度f st有关,而高频P2除与静挠度有关外,还与刚度及车体质量和簧上部分质量之比有关。
低频对应的振动型为车体与构架做相同振动,而高频振动对应车体与构架做反向振动,车体以低频振动为主,而构架则以高频振动为主干线客车及地铁轻轨车辆的两系垂直总挠度通常均在160mm以上。

TRAFFIC AND SAFETY | 交通与安全铁道车辆蛇行稳定性主动控制综述李江利新疆铁道职业技术学院 新疆乌鲁木齐市 830011摘 要: 随着我国交通运输业的不断发展,交通运输载体也都在发展中有了较大的变革,交通运输行业的发展正处于一个日新月异的阶段。
在铁路运输方面的发展,可谓是涉及到很多方面,铁路运输不仅方便了人们的日常交通,在我国国民经济发展中也占有非常重要的地位,这就要从多方面去加强铁道部门的管理。
在铁道车辆中蛇形运动的稳定性是一个非常重要的情况,蛇形运动的频率可以与铁道车辆的运行速度互相融合,互相叠加,也提高了车辆的运行频率。
铁路部门为了更好地改善车辆的运行状态,正在采取相应的措施让车辆与蛇形共振速度保持一致。
关键词:铁道车辆 蛇行稳定性 主动控制 控制算法 测量系统1 引言在现代高速铁道车辆系统中,不同的车辆运行在不同的线路上,在运行线路中有很多的曲线,车辆通过这些曲线时都具有非常良好的舒适性。
车辆在发展的过程中,遵守的基本原则就是高速。
但是车辆的高速运行也会使车轮和轨道之间产生特有的情况,随着车速不断地提高,车辆在运行中产生的能量,就很容易使车辆处于一个蛇形运行的状态。
所以铁路部门正在加大对车辆蛇形稳定性的管理和控制,在车辆的运行速度范围内去考虑车轮踏面锥度的变化。
2 蛇行运行的特性蛇行运动状态的形成原理也是铁道车辆在运行中固有的特点,是由于铁路车辆运行中车轮踏面有锥度,高效的速度给了车轴一个动力,车轮就会对中心线发生横移和转向的变化,整个车辆就会出现横向移动和侧向移动的状态前进,就像蛇的运动。
就算车辆是在普通平整的轨道上行驶,由于轨道与车辆内部的震动能量频率不一样,而且可以互相转换出现特有的能量,也会产生蛇行运动的状态。
蛇行运动的原因是由于车辆在动力学系统中逐渐产生的,与车辆的起动和停止没有关系,影响蛇行运动的主要是车辆的运行速度。
如果离心运动越明显,车辆的运行速度就越快,频率就越大。
§7车辆的的蛇行运动稳定性稳定性包括:静态平衡稳定性和动态(运动)稳定性两大类 静态平衡稳定性:可从静力平衡条件来判定车体在弹簧上的搞倾覆稳定性;车辆抗倾覆稳定性; 轮对抗脱轨稳定性。
动态稳定性:必须从运动方程或者其解的特征来判定。
一、自由轮对的蛇行运动 (三个问题) ○1 基本假设 ○2 运动方程及其解 ○3 解答结果讨论1.其本假设有四点:(1) 自由轮对沿着轨距不变、刚性路面上的平直钢轨作等速运动;(2) 轮对为一刚体,其两个车轮连续不断与钢轨接触; (3) 轮对的运动属微幅振动。
因此轮轨接触几何关系。
蠕滑率-力规律均为线性,且认为纵向蠕滑与横向蠕滑系数相等即f f f ==2211;(4) 自由轮对带有锥形踏面,在新轮与新轨接角时,踏面斜率较小,因此不计重力刚度产生的力和重力角刚度产生的力矩。
以上各条中,假设轮对为刚体并不合适。
1. 运动方程及其解y w ωλ y 受力分析轮对受到蠕滑力的作用(由轮对横摆和摇头引起) 蠕滑力的计算 fv T -= VVv ∆= 设轮对前进速度为V ,角速度为ω。
由轮对横摆引起的蠕滑率左轮 轮对中心 右轮 纵向 滚动圆半径 y r r l λ-=0 r 0 y r r R λ+=0 理论速度 ω(y r λ-0) ωr 0 ω(y r λ+0)滑动速度V -ω(y r λ-0) V -ω(y r λ+0) w y ωλ -w y ωλ纵向蠕滑率)(w x y vr y wλ -r y wλ横向蠕滑率)(w y y v Vw y ∙Vw y ∙由轮对摇头引起的蠕滑率纵向滑动速度: b w ψ -b w ψ 蠕滑率)(w x v ψ:V b ∙ψ -Vb ∙ψ横向 由于的存在,V 的横向分速度:-V w ψ -V w ψ 蠕滑率)(w y v ψ -w ψ -w ψ 合成蠕滑率 1vr y wλ+V b ∙ψ -0r y w λ-V b ∙ψ2vVwy ∙-w ψVwy ∙-w ψ纵向蠕滑力: -f (r y wλ+V b ∙ψ) f (0r y w λ+V b ∙ψ) 横向蠕滑力: -f (Vw y ∙-w ψ) -f (Vw y∙-w ψ)轮对的左右车轮上作用着纵向蠕滑力大小相等、方向相反,形成一力偶,力偶矩为: M Z =2b f (r y wλ+V b ∙ψ)=2f (w y r bλ+V b ∙ψ2) 横向力大小相等方向相同,其受力图如下Vwy ∙-w ψ)f (Vw y∙应用牛顿定律。
河北工业大学车辆实验学蛇行试验报告车辆试验学蛇行试验报告摘要蛇行试验是汽车操纵稳定性的重要组成部分,也是考察汽车稳定性的重要指标。
蛇行试验主要包括客观评价试验和主观评价试验。
本文主要对客观评价试验进行阐述。
由于蛇行试验中要选择外形尺寸和轴距相同的车辆,所以本次试验中我们小组选择Passat B5和Santana 2000两款汽车,在试验中我们通过仪器来测定汽车转向盘转角、横摆角速度、车身侧倾角以及侧向加速度的参数,根据国标所给的公式我们小组利用Matlab软件进行编程拟合出曲线,通过观察试验我们得出Passat B5和Santana 2000蛇行试验均符合国家标准。
Vehicle Test Report On Slalom TestAbstractSnaking test is an important part of vehicle handling stability and an important index of vehicle stability. Snake running test mainly includes objective evaluation test and subjective evaluation test. This paper mainly describes the objective evaluation test. With sinusoidal experiment is to choose the size and shape, the same vehicle wheelbase, so in this experiment we team choose Passat B5 and Santana 2000 car, in the experiment we use instrument to measure the car steering wheel Angle, yawing angular velocity, body roll Angle as well as the parameters of the lateral acceleration, our group according to national standard given formulas using Matlab software to programming fitting a curve, by observing the experiment we found Passat B5 and Santana 2000 crawling all meet the national standards.目录一、汽车操纵稳定性 (5)1.1汽车操纵稳定性定义 (5)1.2汽车对操纵稳定性的影响方面 (5)1.3目前汽车品牌中操纵稳定性的排名及优势 (5)1.3.1德系汽车 (5)1.3.2美国车 (5)1.3.3日系车 (6)1.4汽车操纵稳定性试验有关试验类型 (6)二、蛇行试验 (6)2.1试验准备阶段 (6)2.1.1试验对象 (6)2.1.2试验要求 (6)2.1.3相关试验标准与试验规范 (7)2.1.4试验内容 (7)2.1.5选择试验用仪器设备 (8)2.1.6试验条件对实验结果的可能影响 (8)2.1.7试验方法 (9)2.1.8人员配备和试验记录准备 (9)2.2试验实施阶段 (9)2.2.1车辆设备的预热 (9)2.2.2工况检测 (10)2.2.3读数采样以及校核数据 (10)2.3蛇形试验数据处理 (10)2.3.1蛇行车速 (10)2.3.2平均转向盘转角 (10)2.3.3平均横摆角速度 (11)2.3.4平均车身侧倾角 (11)2.3.5平均侧向加速度 (11)2.3.6时间历程曲线 (12)2.3.7试验数据处理 (12)2.3.9试验评价环节 (13)2.3.10补充评价环节 (15)三、参考文献 (16)四、附录 (17)一、汽车操纵稳定性1.1汽车操纵稳定性定义汽车操纵稳定性,是指在驾驶员不感觉过分紧张、疲劳的条件下,汽车能按照驾驶员通过转向系及转向车轮给定的方向(直线或转弯)行驶;且当受到外界干扰(路不平、侧风、货物或乘客偏载)时,汽车能抵抗干扰而保持稳定行驶的性能。
高速列车蛇行运动稳定性研究概述作者:刘伟渭姜瑞金刘凤伟张良威来源:《河北科技大学学报》2018年第03期摘要:高速列车长期服役的可靠性是高铁建设的首要保证,自激蛇行运动是轨道车辆所特有的一种失稳形式,为了保证车辆的运动稳定性,确保其高速、安全行驶,以高速列车蛇行失稳的理论研究方法为背景,概述了蛇行失稳研究中的主要研究方法及其存在的不足,對近期的研究热点方向进行了概述并对非光滑分岔、非对称运行稳定性等方向进行了展望。
对于高速列车的确定性和稳定性而言,在不考虑车辆非线性特性的情况下,一般可以采用特征根法、Routh-Hurwitz准则判定法、最小阻尼系数等方法进行分析;当必须考虑轮轨接触以及悬挂系统等非线性特征时,可以采用特征值变化法、QR算法+二分法、中心流形法、打靶法、延续算法等方法。
对于车辆的随机稳定性而言,可以采用随机非线性动力学Hamilton理论、蒙特卡洛法、半隐式的Milstein随机数值模拟、小数据量等方法对随机稳定性、随机分岔以及分岔类型进行分析。
由于能够考虑自身结构参数激励、轮轨接触不平顺激励,能得到更接近真实运行条件下的失稳临界速度,随机稳定性、随机分岔的理论研究和试验研究逐渐得到研究人员的关注,成为高速列车蛇行失稳研究的热点方向。
关键词:车辆工程;高速列车;车辆动力学;蛇行稳定性;随机稳定性中图分类号:U260.11 文献标志码:A文章编号:1008-1542(2018)03-0198-06高速列车运行的可靠性是高铁建设以及海外市场推广的首要保证,运动稳定性是这一保证中最为关键的问题。
一旦列车出现蛇行失稳,运行品质将急剧恶化,乘坐舒适性降低,并导致轮轨间强烈的相互作用,引起严重的轮轨磨耗,对线路造成严重危害,甚至引起脱轨,造成重大事故[1-2]。
研究人员对于车辆蛇行运动的深入研究,为列车的设计时速持续提高和自身安全运行提供了重要保障,这包括了对车辆蛇行运动的线性分析、非线性分析、数值分析、滚振试验分析、线路试验分析等方法[3-11]。
§7车辆的的蛇行运动稳定性稳定性包括:静态平衡稳定性和动态(运动)稳定性两大类 静态平衡稳定性:可从静力平衡条件来判定车体在弹簧上的搞倾覆稳定性;车辆抗倾覆稳定性; 轮对抗脱轨稳定性。
动态稳定性:必须从运动方程或者其解的特征来判定。
一、自由轮对的蛇行运动 (三个问题) ○1 基本假设 ○2 运动方程及其解 ○3 解答结果讨论1.其本假设有四点:(1) 自由轮对沿着轨距不变、刚性路面上的平直钢轨作等速运动;(2) 轮对为一刚体,其两个车轮连续不断与钢轨接触; (3) 轮对的运动属微幅振动。
因此轮轨接触几何关系。
蠕滑率-力规律均为线性,且认为纵向蠕滑与横向蠕滑系数相等即f f f ==2211;(4) 自由轮对带有锥形踏面,在新轮与新轨接角时,踏面斜率较小,因此不计重力刚度产生的力和重力角刚度产生的力矩。
以上各条中,假设轮对为刚体并不合适。
1. 运动方程及其解y w ωλ y 受力分析轮对受到蠕滑力的作用(由轮对横摆和摇头引起) 蠕滑力的计算 fv T -= VVv ∆= 设轮对前进速度为V ,角速度为ω。
由轮对横摆引起的蠕滑率左轮 轮对中心 右轮 纵向 滚动圆半径 y r r l λ-=0 r 0 y r r R λ+=0 理论速度 ω(y r λ-0) ωr 0 ω(y r λ+0)滑动速度V -ω(y r λ-0) V -ω(y r λ+0) w y ωλ -w y ωλ纵向蠕滑率)(w x y vr y wλ -r y wλ横向蠕滑率)(w y y v Vw y ∙Vw y ∙由轮对摇头引起的蠕滑率纵向滑动速度: b w ψ -b w ψ 蠕滑率)(w x v ψ:V b ∙ψ -Vb ∙ψ横向 由于的存在,V 的横向分速度:-V w ψ -V w ψ 蠕滑率)(w y v ψ -w ψ -w ψ 合成蠕滑率 1vr y wλ+V b ∙ψ -0r y w λ-V b ∙ψ2vVwy ∙-w ψVwy ∙-w ψ纵向蠕滑力: -f (r y wλ+V b ∙ψ) f (0r y w λ+V b ∙ψ) 横向蠕滑力: -f (Vw y ∙-w ψ) -f (Vw y∙-w ψ)轮对的左右车轮上作用着纵向蠕滑力大小相等、方向相反,形成一力偶,力偶矩为: M Z =2b f (r y wλ+V b ∙ψ)=2f (w y r bλ+V b ∙ψ2) 横向力大小相等方向相同,其受力图如下Vwy ∙-w ψ)f (Vw y∙应用牛顿定律。
列出运动方程轮对横摆 =w W y M -2f (Vwy ∙-w ψ)轮对摇头 =ψwZ J -2f (w y r bλ+Vb ∙ψ2) 上式为两阶联立微分方程组,令其解为 w y =t e y 10λw ψ=t e 10λψ解得: w y =)sin(101βωα+t e y tw ψ=)cos(101βωψα+t e t上式说明w y 、w ψ两个振形的频率相同,但在相位上相差2π 式中的0y 、0ψ、β由初始条件给出。
当β=0时 两者的运动合成如图t 1ω讨论:(1)1α表示系统蛇行运动振幅的变化规律。
当1α<0 系统稳定当1α>0 系统不稳定,失稳)(1αs n g 是判断轮对蛇行稳定性的一个指标。
判断准则,视其方程特征根的实部当1α<0 系统稳定当1α>0 系统不稳定 当1α=0 系统处于临界状态(2)当V 较小时。
可得到下式1α)1(22232bfLV M wzww ρπ+≈wL Vπω21≈1α 为正值,与速度质量、蠕滑系数有关 所以自由轮对从一开始(V >0)就是不稳定的1α ∝)(3V f 正值,V 不大时,近似为简谐振动。
特征根与稳定性当速度很低时,这时可略去惯性力项。
上式可化为轮对橫摆 0=-w w V yψ 轮对摇头 00=+w wy br V ψψ 其解为 w y =)sin(10βω+t y w ψ=)cos(10βωψ+t式中的0y 、0ψ、β由初始条件给出,由此可求出 蛇行运动的频率 V br w 0λω=蛇行运动的波长 λπωπ022br VL ww ==在速度很低时,自由轮对蛇行运动频率和波长的数值与用几何学导出的值完全一样。
一、 转向架的蛇行运动转向架的结构形式很多,从研究蛇行运动稳定性的角度分为两种: 轮对刚性定位转向架 轮对弹性定位转向架1.刚性转向架刚性转向架指各轮对的轴线相互平行同时垂直于构架纵向中心线,且轮对与构架刚性地约束成为一个整体。
轮对除了能绕其自身轴线旋转外,与构架间没有任何方向的相对运动。
这是转向架的一种极端情况,此时轮对的定位刚度可认为无穷大。
自由轮对的情况可认为是另一种极端情况,轮对定位刚度可认为无穷小。
从假设、运动方程的建立和讨论三个方面说明1.1假设:另加两点:a.质心在心盘中心;b.两轮对尺寸完全全相同。
1.2运动方程及其解二轴刚性转向架计算简图V与自由轮对的推导相似可列出刚性转向架的运动方程:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=⎥⎦⎤⎢⎣⎡+++=-+0)(40)(40212t t t tz t t t t y r b V l b f J V y f y M λψψψ t M 、zt J 分别为一台转向架的质量及绕Z 轴的摇头转动惯量;2l 1 为转向架固定轴距。
令其解为 t y =t e y 20λt ψ=te20λψ将其代入方程后可得一2λ的四次特征方程。
其中一对是实根,不表示振动规律,另一对为共轭的复特征根为:t y =)sin(202βωα+t ey tt ψ=)sin(202βωψα+t et式中常数0y 、0ψ、β由初始条件给出 1.3讨论刚性转向架的运动是由频率相同而相位相差2π的两种振动所合成。
在速度不高时,可得 2α=)1(22122232l b fL V M tztt ++ρπ2ω=tL Vπ2式中t L 刚性转向架几何学蛇行运动波长 t L =)1(22210bl br +λπtz ρ 刚性转向架摇头转动惯量的惯性半径;由2α知,刚性转向架与自由轮对一样,其特征根的实部为正值,这意味着运动一开始V >0就产生失稳的蛇行运动。
其频率与刚性转向架几何学蛇行运动频率相接近。
随着速度提高,2α殷剧增加失稳程度愈严重。
当速度很低时,可略去方程式中的惯性项可简化为下列方程⎪⎭⎪⎬⎫++=-t t t t y r l b bV V y0212)(0λψψ 其解为⎭⎬⎫+=+=)cos()sin(00βωψψβωt t y y t t t t式中常数0y 、0ψ、β由初始条件给出 于是得刚性转向架蛇行运动频率为)1(2120l b br t +=λω刚性转向架蛇行运动的波长为22122101)1(2b l L bl br L w t +=+=λπ由此可见,速度很低时,刚性转向架蛇行运动的波长与频率和刚性转向架几何学蛇行运动的波长与频率完全一致轮对定位刚度趋于无穷大的刚性转向架,其蛇行运动波长为最大值;轮对定位刚度趋于零的自由轮对,其蛇行运动波长为最小值; 实际上这两种结构均不存在,具有一定轮对定位刚度的转向架,它的蛇行运动的波长应在这两者之间,即t W L L L <<刚性转向架的蛇行运动频率t ω最低;自由轮对的蛇行运动频率w ω最高;具有一定轮对定位刚度的转向架,它的蛇行运动的频率应在这两者之间,即 t ω< ω <w ω这在转向架动力学试验和转向架蛇行运动稳定性的计算中都得到证实。
2.弹性转向架2.1基本假定在讨论自由轮对时所着的假定作如下补充○1假定车体与转各架为弱耦合,因此车体的滚摆及摇头对转向架几乎不产生影响,即认为车体是处于相对的静止状态,只传递垂直载荷给转向架;○2假定转向架构架的质心高度与车轴中心线一致,由此可忽略构架侧滚振动的影响;○3一系和二系的悬挂(包括轮对定位装置)特性都是线性的。
此外,在采用心盘承载的结构中,不考虑转向架相对车体转动时产生的摩擦力矩。
2.2运动微分方程研究弹性转向架蛇行运动时,要考虑六个自由度,包括每个轮对的横摆与摇头以及转向架的横摆与摇头。
作用在转向架上的力包括悬挂力、轮轨蠕滑力以及重力(角)刚度产生的力(力矩)。
见P66面。
弹性转向架运动微分方程包含有六个二阶的微分方程。
通过数学处理可杨为十二阶的特征方程,或降阶为十二阶的状态空间,用相应的程序求解方程的特征根。
再根据特征根的实部的正负来判别系统的运动稳定性。
更进一歩还可求得每一对共轭特征根时各自由度的特征向量,由此了解各振形的振幅比及其相位关系。
这样可获得各种工况(不同速度、不同参数的不同数值)下的系统各自由度的全部运动特征的信息,耤此可全面了解分析系统的运动状态。
在一个多自由度振动系统中,只有当系统的所有特征根的实部全为负值时系统的运动才是稳定的。
在P67面有两个关于转向架蛇行运动的例子。
可自阅。
2.3 影响转向架蛇行运动的因素一台具有轮对定位装置的转向架有3六个自由度、17参数。
下面讨论影响较大的参数;(1)轮对定位刚度轮对的纵向定位刚度和横向定位刚度对转向架的蛇行运动的临界速度起决定性影响;(2)车轮踏面斜率车轮踏面斜率λ也是影响蛇行运动临界速度的重要参数这一,仅次于定位刚度;cr V λ1∝(3)蠕滑系数当f 较小时,临界速度也较低,而当超过k f 后,上升趋势就逐渐缓慢。
(4)转向架固定轴距临界速度随轴距增加而上升,且上升值较大。
(5)中央弹簧横向刚度对临界速度影响不很大,弹簧刚度的选取取决于运行平稳性指标;(6)转向架构架的摇头转动惯量转向架构架的摇头转动惯量在常用值范围内变化时,临界速度随摇头转动惯量的增加而缓慢上升。
这个参数主要由转向架的结构参数确定。
各国对车辆蛇行运动临界速度的理论值来确定车辆的构造速度: 美国:5.1~2.1max=V V r C英国:根据max V 时的相对阻尼系数08.022≥+=ωa a DRC 来衡量;法国:在设计Y 32 客车转向架时3max =V V r C 日本:提出用稳定性安全裕度来考虑,未给出具体数据;蛇行运动稳定性是衡量车辆(转向架)橫向动力学性能的重要指标。
但必须与车辆的曲线通过性能综合考虑。
自激振动的特征:1. 自激振动与自由振动的区别。
n 个自由度的自由振动系统,只要有一个初始条件(某一自由度的位移、速度、加速度),系统就开始振动。
它有n 个频率和与此相对应的阻尼,各振形有它自已的振幅比及相位。
对于n 个自由度的自激振动系统,就车辆来说,只要轮对在钢轨上滚动,自激振动就此产生。
在一个速度下,就有一组(n 对)特征值,每对特征值表征一种振动的特性(阻尼和频率)。
所以运动着的车辆,它可以有无数个振动工况。
2. 共振与失稳的差别对于强迫振动系统,只要激振力中的某一个频率与该系统的自振频率中的某一个相等时就发生共振,超过共振临界速度后,共振现象就消失。