第四章系统的运动稳定性
- 格式:ppt
- 大小:348.50 KB
- 文档页数:20
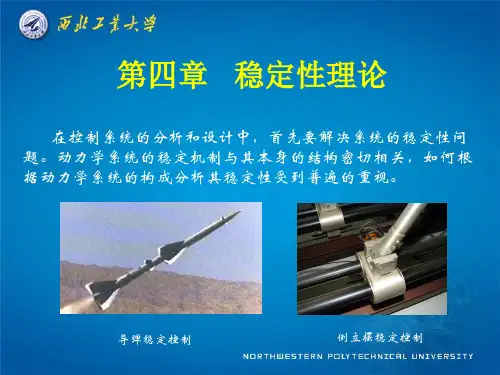
第四章系统稳定性及其李雅普诺夫稳定4-1 稳定性一般概念对于一个实际的控制系统,其工作的稳定性无疑是一个极其重要的问题,因为一个不稳定的系统在实际应用中是很难有效地发挥作用的。
从直观上看,系统的稳定性就是一个处于稳态的系统,在某一干扰信号的作用下,其状态偏离了原有平衡位置,如果该系统是稳定的,那么当干扰取消后有限的时间内,系统会在自身作用下回到平衡状态;反之若系统不稳定,则系统永远不会回到原来的平衡位置。
系统的稳定一般有外部稳定和内部稳定两种。
外部稳定又称作输出稳定,也就是当系统在干扰取消后,在一定时间内,其输出会恢复到原来的稳态输出。
输出稳定有时描述为系统的BIBO稳定,即有限的系统输入只能产生有限的系统输出。
系统内部稳定主要针对系统内部状态,反映的是系统内部状态受干扰信号的影响。
当扰动信号取消后,系统的内部状态会在一定时间内恢复到原来的平衡状态,则称系统状态稳定。
在经典控制论中,研究对象都是用高阶微分方程或传递函数描述的单输入单输出(SISO)系统,反映的仅是输入输出的关系,不会涉及系统内部的状态。
因此经典控制论中只讨论系统的输出稳定问题。
系统的稳定性是系统本身的特性,与系统的外部输入(控制)无关。
在经典控制论中,我们通过研究线性定常系统的特征根的情况来判断系统的输出稳定性:如果系统的特征根都有负的实部(即都在复平面的左部),则系统输出稳定。
对于n阶线性连续系统,其特征方程为:…………………………(4-1)当n≥4时,要求出其所有特征根是非常困难的,从而要想通过解出高阶系统的特征根来判别系统稳定性也是不现实的。
所以1877年劳斯(Routh)和1895年霍尔维茨(Hurwitz)分别提出了有名的劳斯-霍尔维茨稳定判据,它可以通过线性定常系统特征方程的系数的简单代数运算来判别系统输出稳定性,而不必求出各个特征根。
有关Routh-Hurwitz判据的详细内容请参阅有关经典控制论教材。
当系统不是线性定常系统时,或者对于系统内部状态稳定问题,经典控制论中的方法就不好解决了,这就需要下面介绍的李雅普诺夫(Lyapunov)稳定性的理论。
第四章 运动稳定性和分叉一、自治系统平衡点的稳定性由于实际系统总有干扰或误差,稳定性的意义在于任何初始扰动导致随后的运动任意小,稳定性包括三种:稳定、渐近稳定和不稳定。
稳定性的定义具有多个,Lyapunov 意义的稳定性是其中最基本的一个,它包括线性系统的稳定性问题。
线性系统稳定性属于全局稳定性,而非线性系统的稳定性是一个局部性概念。
考察如下自治系统n n R R U f u f u→⊂=:)(, (1)式中U 为定义域,是欧氏空间中的一个子集,平衡点满足0)(=s u f 。
可将平衡点或周期解的稳定性化为零解的稳定性问题。
一般地,例如对于一般非自治系统),(u t f u= ,其周期解为)(t u s ,令s u x u +=,可得),(),()(),(s s s u t f u x t f t u u t f x-+=-= ,此时该方程的零解对应于原系统的平衡点或周期解。
1.Lyapunov 直接方法(1)Lyapunov 函数单值可微函数),,,()(21n u u u V u V =,满足0)0(=V ,其定义域为{}H u u U ≤=,0>=const H (这里⋅表示连续系统的范数,⋅表示离散系统的范数)。
[定义1] 若在U 内恒有0)(≥u V ——正常号函数;0)(≤u V ——负常号函数,统称为常号函数,否则称为变号函数。
[定义2] 当且仅当0=u 时,0)0(=V ,称正常号函数为正定函数;负常号函数为负定函数,统称为定号函数。
若00=≠=u V 时,称正常号函数为半正定函数;称负常号函数为半负定函数,统称为半定号函数。
例1.232221321),,(u u u u u u V ++=,正定函数 2221321),,(u u u u u V +=,正常号函数,除)0,0,0(外,还有),0,0(3u 使0=V232221321),,(u u u u u u V -+=,变号函数例2.2132********)()()(),,(u u u u u u u u u V -+-+-=,当321u u u ==时,0=V ,所以V 常正。
稳定性当系统承受这种干扰之后,能否稳妥地保持预定的运动轨迹或者工作状态,这就是稳定性。
使问题简化,而不得不忽略某些次要因素。
近似的数学模型能否如实反映实际的运动,在某种意义上说,也是稳定性(鲁棒性)问题。
平衡状态(4-2)受扰运动:平衡状态:(4-5)0 x t t"³?是李雅普诺夫意义下稳定的。
李雅普诺夫稳定性就是要研究微分方程的解在tÎ[t,+¥)上的有界性。
1. 此处d 随着e 、t 0而变化;时有‖x (t ;t 0,x 0)‖<e "t ≥t 0成立初值变化充分小时,解的变化(t ≥ t 0)可任意小(不是无变化);(t 0,e )£e 。
edt0x (t 0)d (t 0,e )x 0x (t )李雅普诺夫意义下稳定的几何意义(t 0)‖一致稳定:(4-9)00(,,)0(,,)T t T t m d m d >()S e ()H e 0x x()S d ()S e 0x ()x t T()S d t固定的吸引区,不是<m ,t >t 0+ T(m ,t 0,x 0)t 0mt 0+ T(m , t 0, x 0)e00lim (,,)0®¥=t x t t x数量吸引区局部幸好,就我们所讨论的线性系统而言,全局和局部是一致的。
可见,即使初始值很大地偏离了平衡状态,系统最终0x1otl nx 非线性系统的解,),<。
故系统是李氏稳定的。
又与t d ddx xdt tttd<,,故其零解一致稳定。
又0t t 0t t()S e 0x ()x t ()S d cx ()e指数渐近稳定稳定渐近稳定一致渐近稳定一致稳定第一方法线性化的间接第二方法直接判断直接法李雅普诺夫第二方法目前仍是研究非线性、时变系统最有效的方法,是许多系统控制律设计李雅普诺夫第二法的主要定理(4-16)李雅普诺夫函数充分条件4-17)),则称系统原点平衡状态为大范围一致渐近稳定。